

6.5.5. Схема реализации регулятора
Реализация регулятора с передаточной функцией , представляющей собой обычный интегратор, не вызывает затруднений. Остановимся подробнее на реализации звена обратной связи с передаточной функцией .
Для реальных объектов степень полинома числителя передаточной функции обычно меньше степени полинома ее знаменателя, поэтому корректор динамики, как правило, имеет форсирующий характер, то есть
![]() .
.
Это означает, что необходимо реализовать дифференцирующие звенья, которые подчеркивают высокочастотную помеху.
Рис.6.16. Cхемная реализация фильтра |
С целью уменьшения этого влияния используем специальный фильтр, который подключается параллельно объекту и состоит из модели (с выходом ) и стабилизирующей добавки L(р). Его называют фильтром Калмана-Бьюсси или параллельным фильтром. Здесь блок L(р) сводит к нулю разницу между выходом у и выходом модели . |
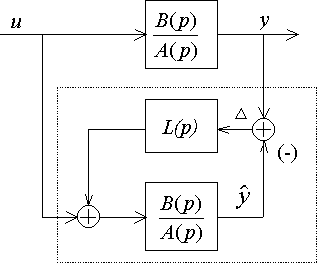
Рассмотрим работу фильтра, для чего запишем выражение для ошибки :
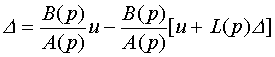
или после преобразований
[ A(р) + B(р) L(р) ] = 0. |
(6.59) |
Рис.6.17. Схемная реализация корректора динамики |
Как видим, если
корни полинома [A(р)
+ B(р)L(р)]
имеют отрицательную вещественную
часть, то ошибка
Используя такой фильтр, получим следующую схему реализации корректора динамики |
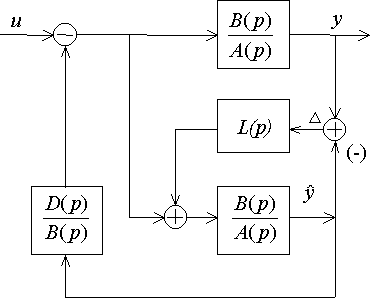
Эту схему можно упростить, если представить передаточную функцию объекта в виде
|
(6.60) |
Структурная схема замкнутой системы принимает вид:
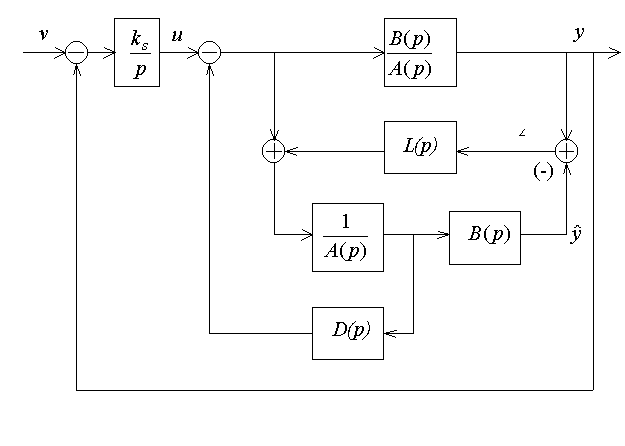
Рис.6.18. Полная структурная схема системы, рассчитанной модальным методом
Блоки фильтра и регулятора реализуются на активных элементах так, как предложено в первом способе раздела 3.8.
Пример 6.5.
Для объекта управления, передаточная функция которого имеет вид
![]() ,
,
требуется рассчитать параметры корректирующих звеньев модальным методом. Процессы в замкнутой системе должны удовлетворять следующим показателям:
![]() .
.
Решение. Порядок замкнутой системы с нулевой статической ошибкой равен 3. По требованиям к качеству процессов выбираем корни желаемого характеристического полинома замкнутой системы Эталонный процесс задаётся корнями
![]() .
.
Желаемый характеристический полином имеет вид
|
(6.61) |
Согласно уравнению (6.52) определяем определяем характеристический полином замкнутой системы с учётом корректирующих звеьев (6.48), (6.51), т.е.
|
(6.62) |
Из равенства коэффициетов в выражениях (6.61), (6.62) при соответствующих степенях р находим параметры корректоров динамики d0 , d1 и статики Ks
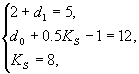 .
.
т.е.
![]() .
.
Процессы в замкнутой системе с корректирующими звеньями
![]()
удовлетворяют заданным показателям качества.