

2.2. Составление математической модели
Процедуру получения математической модели объекта можно разбить на следующие этапы:
1. Составление гносеологической (мысленной) модели объекта. Исходя из технического задания и изучения режимов работы объекта, у инженера возникает приближенная мысленная модель, которая в дальнейшем уточняется и приобретает вид математической модели.
2. Определение
независимых переменных,
которые характеризуют объект, и уточнение
их размерностей. При этом число управляющих
воздействий
не может быть меньше числа выходных
переменных
![]() .
Размерность переменных
состояния
не может быть меньше размерности выходных
переменных
.
Размерность переменных
состояния
не может быть меньше размерности выходных
переменных
![]() .
Размерность возмущающих
воздействий
M
может быть произвольной и никак не
связана с размерностью y,
x,
u.
.
Размерность возмущающих
воздействий
M
может быть произвольной и никак не
связана с размерностью y,
x,
u.
3. Запись физических законов, в силу которых развиваются процессы в объекте.
4. Приведение уравнений объекта к стандартному, с точки зрения теории автоматического управления, виду.
Математическая модель никогда не бывает тождественна рассматриваемому объекту, так как при ее составлении всегда делают какие-либо допущения и упрощения. Поэтому для одной и той же системы, в зависимости от целей управления, она может быть разной.
При составлении математической модели приходится искать компромиссный вариант между двумя противоречивыми требованиями: с одной стороны, модель должна наиболее полно отражать свойства реальной системы; с другой стороны - она должна быть простой, чтобы не затруднять исследований.
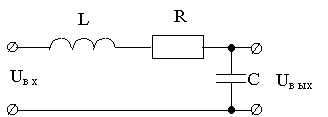
Пример 2.3.
Записать математическую модель следующего объекта
Рис.2.1. Эквивалентная схема объекта |
|
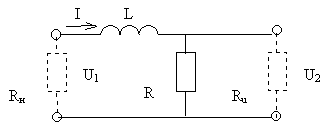

Запишем законы Кирхгофа, в силу которых развиваются процессы в объекте:

Перейдем к стандартному, с точки зрения
ТАУ, описанию объекта. С этой целью
выходной величиной будем считать
напряжение
![]() ,
то есть y =
;
управляющим воздействием - напряжение
,
то есть y =
;
управляющим воздействием - напряжение
![]() ,
а переменной состояния - ток, протекающий
по цепи (х=I). С учетом введенных обозначений
запишем уравнения объекта в следующем
виде:
,
а переменной состояния - ток, протекающий
по цепи (х=I). С учетом введенных обозначений
запишем уравнения объекта в следующем
виде:
![]()
а затем перейдем к уравнениям состояния:
![]()
![]()
2.3. Структурные схемы
Структурной схемой называется графическая модель системы, в которой каждому элементу ставится в соответствие его динамическая характеристика.
Рассмотрим, как получить структурную схему, соответствующую векторно-матричному описанию объекта типа:
|
(2.6) |

Проинтегрируем уравнение состояния и определим x(t)
|
(2.7) |
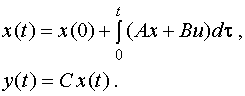
По выражению (2.7) изобразим структурную схему, придерживаясь следующего правила: входные и выходные переменные объекта необходимо располагать на одной горизонтальной прямой.
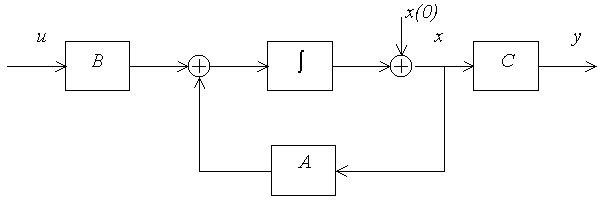
Рис.2.2. Структурная схема, соответствующая уравнениям состояния объекта
Для одноканального объекта структурную схему можно составить по уравнению (2.3), разрешив его относительно старшей производной
![]()
и далее n-раз интегрируя. В результате получим
Рис.2.3. Структурная схема, соответствующая скалярному дифференциальному уравнению.
2.4. Переходная функция (переходная характеристика)
Эта динамическая характеристика применяется для описания одноканальных систем
![]()
с нулевыми начальными условиями
![]()
Переходная характеристика h(t) - это реакция системы на входное единичное ступенчатое воздействие при нулевых начальных условиях.
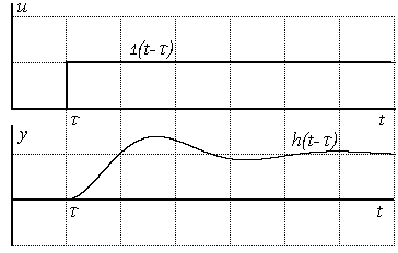
![]() -
момент возникновения входного воздействия
-
момент возникновения входного воздействия
Рис.2.4. Переходная характеристика системы
Примеp 2.4:
Переходные характеристики для различных значений активного сопротивления в электрической цепи:
|
|
|
|
|
|
|
Чтобы определить переходную характеристику аналитически, следует решить дифференциальное уравнение при нулевых начальных условиях и u(t)=1(t).
Для реальной системы переходную характеристику можно получить экспериментальным путем; при этом на вход системы следует подавать ступенчатое воздействие и фиксировать реакцию на выходе. Если ступенчатое воздействие отлично от единицы, то характеристику на выходе следует разделить на величину входного воздействия.
Зная переходную характеристику, можно определить реакцию системы на произвольное входное воздействие с помощью интеграла свертки
|
(2.8) |
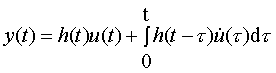 ,
,где - переменная интегрирования. 2.5. Импульсная характеристика (импульсная функция)
Данная характеристика используется для описания одноканальных систем вида (2.3) с нулевыми начальными условиями.
Импульсная характеристика (функция) - это реакция системы на входное единичное импульсное воздействие при нулевых начальных условиях.
Дельта-функция обладает следующими свойствами:
|
(2.9) |

С помощью дельта-функции моделируется реальное входное воздействие типа удара.
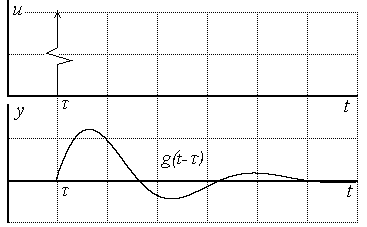
Рис.2.5. Импульсная характеристика системы
Примеp 2.5:
Импульсные характеристики для различных значений активного сопротивления в электрической цепи:
|
|
|
|
|
|
|
Импульсная функция позволяет вычислить реакцию системы на произвольное входное воздействие при нулевых начальных условиях по выражению
|
(2.10) |
Переходная функция и импульсная функция однозначно связаны между собой соотношениями
|
(2.11) |

что позволяет по одной известной характеристике определить вторую.