

5.3. Анализ статических режимов
Статическим
называют такой установившийся режим
работы системы, при котором переменные
системы, а также входные
воздействия и внешние возмущения с
течением времени не изменяются. Величина
статической
ошибки
![]() ,
характеризующей данный режим, позволяет
разделить все системы на несколько
типов.
,
характеризующей данный режим, позволяет
разделить все системы на несколько
типов.
5.3.1. Статические системы
Статической
будем называть такую систему управления,
функционирование которой возможно
только при наличии статической
ошибки
![]() .
.
Рассмотрим работу системы со следующей структурной схемой:
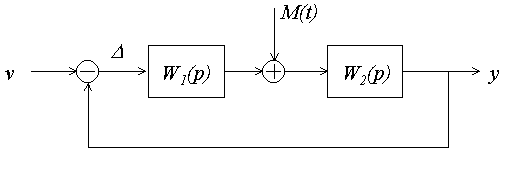
Рис.5.7. Структурная схема статической системы
Здесь
![]() -
передаточные
функции,
не содержащие в своем составе интегрирующих
звеньев,
поэтому в статике они принимают вид:
-
передаточные
функции,
не содержащие в своем составе интегрирующих
звеньев,
поэтому в статике они принимают вид:
![]() .
Обычно первый блок представляет собой
регулятор
.
Обычно первый блок представляет собой
регулятор
![]() а
второй - объект
управления
а
второй - объект
управления
![]()
Запишем выражение для ошибки в операторной форме,
![]()
или после преобразований
|
(5.14) |

Полная ошибка регулирования складывается из двух составляющих: ошибки по входному воздействию и по возмущению. Полагая в выражении (5.14) p= 0, получим статическую ошибку
|
(5.15) |
Здесь![]() -общий
коэффициент усиления, характеризующий
глубину обратной связи.
-общий
коэффициент усиления, характеризующий
глубину обратной связи.
Особое значение статическая ошибка имеет в системах стабилизации, когда требуется обеспечить выполнение свойства (5.3), то есть lim y(t) = v при . Для этих систем входное воздействие постоянно (v =const), а возмущение меняется произвольным образом ( M = var). Составляющая ошибки, порожденная входным воздействием, может быть уменьшена путем масштабирования, поэтому важной является зависимость ошибки от возмущения.
Рис.5.8. Зависимость статической ошибки от возмущения |
Согласно выражению (5.15), статическая ошибка по входному воздействию определяется величиной k, а ошибка по возмущению зависит только от . |
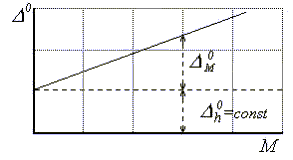
Следовательно, для уменьшения полной ошибки необходимо увеличивать коэффициент усиления, прежде всего . Однако, его чрезмерное увеличение может привести к неустойчивости системы.
5.3.2. Астатические системы
Астатическими называются системы, в которых отсутствует составляющая статической ошибки, порожденная входным воздействием. Астатизм обычно достигается введением в регулятор интегрирующего звена (рис.5.9).
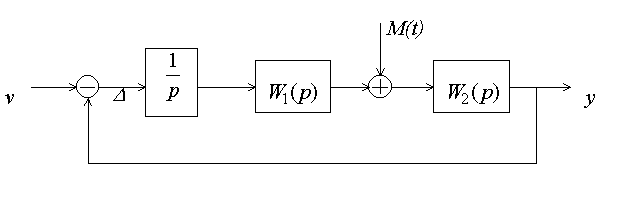
Рис.5.9. Структурная схема астатической системы
Полагая, что
![]() -
передаточные функции, не содержащие в
своем составе интегрирующих звеньев,
определим ошибку в системе
-
передаточные функции, не содержащие в
своем составе интегрирующих звеньев,
определим ошибку в системе

которая после преобразований принимает вид

или окончательно
|
(5.16) |

Как следует из (5.16), в статике будет равна нулю не только ошибка по входному воздействию, но и ошибка по возмущению, то есть
|
(5.17) |
Для астатических систем представляет интерес режим ‘‘линейной заводки’’, при котором входной сигнал v есть линейная функция времени
v(t) = v(0)
 ,
,
или в операторной форме
v(p)
|
(5.18) |
где
![]() const
.
const
.
Подставим v(р) в выражение для ошибки (5.16)
 ,
,
откуда в установившемся режиме (при p =0) получим скоростную ошибку
|
(5.19) |
Для уменьшения
можно
масштабировать входное воздействие
![]() или
увеличивать общий коэффициент усиления
системы k
.
или
увеличивать общий коэффициент усиления
системы k
.