

1. Введение Основные понятия и определения
Объект управления – техническое устройство или процесс, поведение которого необходимо изменить.
Управление - процесс воздействия на объект управления с целью изменения его поведения.
Регулирование - частный случай управления, целью которого является приведение состояния объекта к заданному.
Автоматический процесс - процесс, который совершается без участия человека.
Управляющее устройство (регулятор) - устройство, предназначенное для реализации процесса управления (регулирования).
Система - совокупность элементов, объединенных общим режимом функционирования.
Динамическая система – это система, в которой процессы изменяются во времени.
Совокупность объекта управления и управляющего устройства (регулятора) называется системой автоматического управления (регулирования).
Теория автоматического управления (ТАУ) - научно-техническая дисциплина, в рамках которой изучаются свойства систем автоматического управления и разрабатываются принципы их построения и расчета.
Основными элементами САУ являются:
- объект управления (ОУ);
- управляющее устройство или регулятор (Р), который сравнивает выход управляемого объекта с желаемым и в зависимости от этого вырабатывает управляющий сигнал на объект.
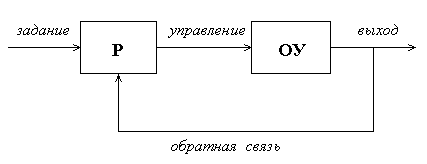
Рис.1.1. Функциональная схема замкнутой системы
Рассмотрим подробнее объект управления и выделим переменные, которые его характеризуют.
Рис.1.2. Функциональная схема объекта управления |
- Управляющие воздействия u1, ... , um - это входные сигналы объекта управления, с помощью которых можно влиять на режим работы объекта. - Входными (задающими) принято называть воздейсвия (сигналы), поступающие на вход системы и определяющие требуемые законы изменения выходных переменных (сигналов) |
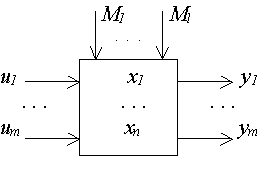
- Выходные переменные y1, ... , ym - это измеряемые выходные сигналы динамической системы.
- Переменные
состояния x1,
... , xn
- это внутренние, как правило, недоступные
измерению переменные, которые определяют
состояние объекта в каждый момент
времени; причем
![]() .
.
- Возмущающие воздействия M1, ..., Ml - отражают случайные воздействия окружающей среды на объект управления и обычно недоступны измерению. Требование парирования их влияния и приводит к необходимости создания систем автоматического управления.
Все переменные, которые характеризуют объект, удобно представить в векторной форме:

Входные воздействия на систему (или задание на регулятор) принято обозначать буквой v. Их число обычно совпадает с числом выходных переменных и изображается следующим вектором:

В зависимости от числа входных и выходных переменных выделяют:
- одноканальные объекты (или системы) - объекты, в которых есть только одна выходная переменная (m=1);
- многоканальные
(многосвязные, многомерные, взаимосвязные)
объекты (или системы) - объекты, в которых
число выходных переменных больше единицы
(m>1).
![]()
2. Динамические характеристики линейных систем
Под динамической характеристикой (математической моделью) системы понимают любое соотношение, заданное аналитически, графически или в виде таблицы, которое позволяет рассчитать поведение системы во времени.
2.1. Дифференциальные уравнения
2.2. Составление математической модели
2.3. Структурные схемы
2.4. Переходная функция (переходная характеристика)
2.5.Импульсная функция (импульсная характеристика)
2.6. Переходная матрица
2.7. Передаточная функция
2.8. Модальные характеристики
2.9. Частотные характеристики