

17. Расчет статической устойчивости простейшей системы. Коэффициент запаса . Практические критерии устойчивости.

На шинах системы модуль U и его фаза неизменны

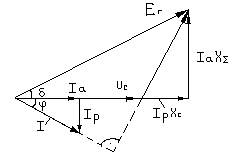
Х∑=Хг+Хт1+Хл/2+Хт2, Iс∙Х∑=Еsinδ, Uc∙Ic=(Uc∙Е/ Х∑)∙sinδ=P - мощность выдаваемая генератором
Мощность выдаваемая генератором в сеть зависит от δ.
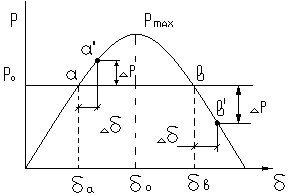
Если возникает избыток мощности то генератор начинает ускорятся .Получается новая точка равновесия если ее не существует, то генератор выпадает из синхронизма или отключен защитой. Если точка равновесия существует , то пройдя эту точку генератор начнет тормозится в точке (а)-тормозится в точке (в) ускоряться / Рмах=(Uc∙Е/ Х∑) – идеальный предел мощности/
Все точки устойчивого равновесия находятся на восходящей части синусоиды 0÷90, зона от 90÷180 является неустойчивой работы. Статическая устойчивость – способность системы самостоятельно восстанавливать исходный режим работы при малом возмущении. Важные условия статической устойчивости: для устойчивости системы необходимо и достаточно чтобы приращение угла и мощности Рг имели один и тот же знак т.е. ∆Рг/∆ δ>0, или переходя к пределу dPг/d δ>0, это условие выполняется при 0≤ δ≤90
Кз=(Рн-Ро)/Ро – коэф-т запаса по мощности
Кз= (δ- δо)/ δo – коэф-т запаса по углу
18. Метод малых колебаний при анализе статической устойчивости.
Основные положения метода заключаются в подаче небольших возмущений системе и анализе возникновения свободных колебаний. Т.к. характеристики ДУ является нелинейный, то при анализе применяется методы линеаризации. Приводя исходные ДУ к линейному ДУ с постоянными коэффициентами. При решении необходимо разрешить характеристическое уравнение выявить постоянные интегрирования. При анализе устойчивости чаще всего не требуется находить решение ДУ. Анализируются корни характеристического уравнения
Тj∙(d2δ/dt2)=Po-Pm∙sinδ
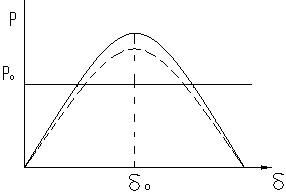
. Если даем толчок, изменяем характеристику, то возникают
∆Р=Ро- Pm∙sinδ – небаланс.
При малых колебаниях ротора разложим ∆Р в ряд Тейлора в окрестности точки δо. При малых ∆δ числами второго, третьего и высшего порядка пренебрегаем.
В результате решения получаем уравнение:
(d2∆δ/dt2)+(1/Tj)∙(dP/dδ)∙∆δ=0
,решение ∆δ=К1еР1t+К2еР2t
Характеристическое уравнение :
P2+(1/Tj)∙(dP/dδ)=0,
где решением является
Корни характеристического уравнения – при линейные при dP/dδ>0 Либо корни вещественные, равные по модулю и разные по знаку. При линейных корнях ∆δ=Сsin(ωt+ψ) Изменение угла происходит вокруг δ0 по синусоиде, незатухающий характер колебанй связан с неучетом потерь эл.энергии в исходных ДУ. Из-за потерь энергии в электрической и механической части генераторов колебания затухнут и установится прежний или новый режим ∆δ=К1еµt+ К1еµt . Следовательно необходимым и достаточным условием устойчивости работы генератора является положительность синхронизирующей мощности dP/dδ. При неучете активных сопротивлений статическая устойчивость нарушается при углах > 90, где колебания угла приобретают непериодический характер и генератор выходит из синхронизма.