Синхронизирующая мощность. Анализ устойчивой и неустойчивой частей угловой характеристики мощности.
Uc=const, т.к. система ∞ мощности (при любых режимах работы). Xc=Xг+Хт1+Хл+Хт2, Р=Рм*sinδ, тогда
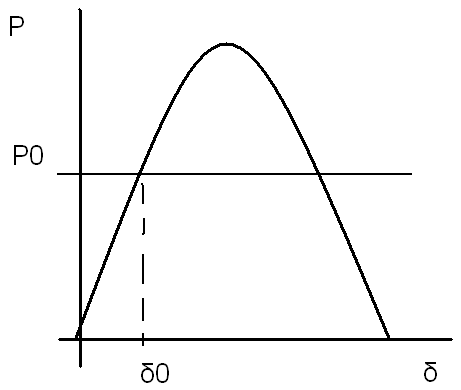
Р= – уравнение характеристики мощности, или угловой характеристики.
Если считать что ЭДС и U постоянны, то характеристика зависит от δ. Точка «а» (устойчивое равновесие) и «b» (неустойчивое равновесие) точки равновесия мощности. Если задать приращение угла δ, и при нахождении в точки «с’» наблюдается небаланс активной мощности, что приводит к ускорению работы, и увеличению угла δ. В точке «с”» появляется избыток мощности (небаланс). В точке «а» избытка мощности нет, но ротор накопил дополнительную кинетическую энергию за счёт вращения, и рабочая точка начинает перемещаться вверх (δ увеличивается). В точке «d’» недостаток мощности, из за этого ротор генератора начинает тормозить, запаса кинетической энергии хватит до точки d, в которой тормозящий момент максимальный, после этой точки угол δ начинает уменьшаться, опять идёт к точке а, с’’ и т.д.
В системе турбина-генератор, без потерь колебания выполнялись бы бесконечно. Наличие паразитных моментов, демпферных обмоток , потери в подшипниках за счёт трения о воздух – колебания затухают. В точке b при задании небольшого толчка -> перемещение в точку е, избыток мощности -> ускоряется ротор, увеличивается угол δ -> увеличивается избыток мощности -> лавинообразный процесс. Максимальная точка – идеальный предел мощности. За время протекания переходного процесса мощность не меняется из-за большой инерционности направляющих аппаратов. Все точки которые находятся на левой стороне синусоиды, являются устойчивыми. При чисто индуктивной схеме замещения, критический угол 90, но при появлении активного сопротивления угол начинает уменьшаться. Большое влияние оказывает сопротивление линий и генераторов с учётом АРВ.
Критерий статической устойчивости
(синхронизирующая мощность).
Tj*=Tj* ; ω*= ; S=1- ω*;
Iн.д.= Sns=
Uoст= 1-Ки – Хтр; Ки =
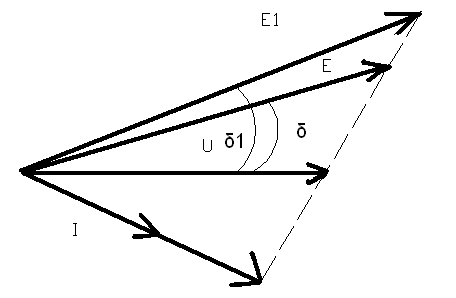
Параметры режима: I, U, S, угол между ЭДС
Параметры системы: индуктивности, ёмкости, активные сопротивления.
Влияние параметров системы и параметров режима на характеристику мощности.
Согласно формулам угловой мощности P=(Eг*Uc)/Xc*sinδ, кроме угла δ, большое влияние оказывает на характеристику мощности сопротивление системы:
- определяющим является сопротивление генератора (оно может быть большим и незначительным);
- если линии короткие сопротивление малое, а если длинные то сопротивление большое.
Чтобы повысить U на генераторе необходимо повысить Iв.
При расчёте статической устойчивости необходимо учитывать потери мощности в элементах системы и потери напряжения. В общем суммарном сопротивлении системы большое влияние вносит сопротивление линии и генератора с учётом АРВ.
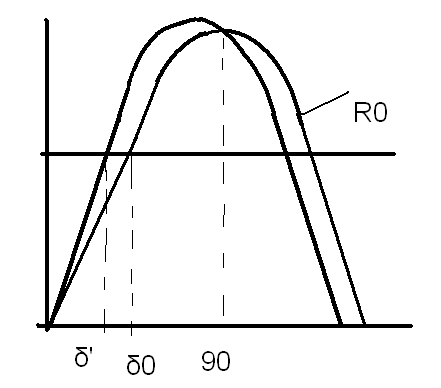
Учёт активной сопротивлений или нагрузки ведёт к смещению критического угла в сторону уменьшения, но и идеальный предел мощности немного повышается. Подключенная нагрузка увеличивает коэффициент запаса статической устойчивости, а δ0 уменьшается до δ'.
 δ-
δ- ,
где
,
где
 -очень
мал, если его не учитывать, то R
=>
и
-очень
мал, если его не учитывать, то R
=>
и
 =0. Т.к.
положителен
=> постоянный, то состовляющая мощности
положительная.
=0. Т.к.
положителен
=> постоянный, то состовляющая мощности
положительная.
Pг
=
 ;
Pм
=
;
Pм
=
 Т.к.
Х3 равняется ∞, то формула примет вид:
Pм
=
Т.к.
Х3 равняется ∞, то формула примет вид:
Pм
= Переходим от
Т-образной схемы замещения к простому
сопротивлению. Чем меньше Х3 тем ниже
характеристика мощности у генератора.
Параметры которые оказывают влияние:
ток, напряжение, мощность, угол между
ЭДС. Параметры системы: индуктивности,
ёмкости, активные сопротивления.
Переходим от
Т-образной схемы замещения к простому
сопротивлению. Чем меньше Х3 тем ниже
характеристика мощности у генератора.
Параметры которые оказывают влияние:
ток, напряжение, мощность, угол между
ЭДС. Параметры системы: индуктивности,
ёмкости, активные сопротивления.