5.Математическое моделирование переходных процессов. Схемы замещения и структурные схемы.
Во время переходных процессов происходит изменение ЭДС, токов, напряжений, угловых скоростей роторов и механических моментов вращающихся маши. Одновременно изменяются уровни энергии, запасенной во всех электрических и механических элементах систем. Для проведения исследования этих процессов, которые протекают в реальности, и необходимо создать модели.
Математическая модель представляется системой дифференциальных уравнений, обычно упрощенных по сравнению с теми которые входят или должны были бы входить в общую модель.
Схемы замещения.
1) ЛЭП, кабельные линии
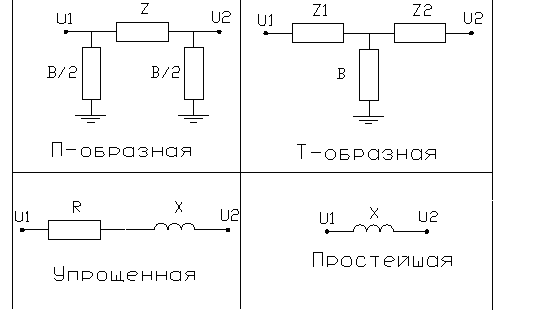
Могут замещаться Т-образной или П- образной схемой замещения. В – емкостная проводимость линии, См/км
Для упрощения можно схему замещения из R и Х. Если Х в 3 и более раза больше R то можно простейшую схему.
2) Асинхронные двигатели
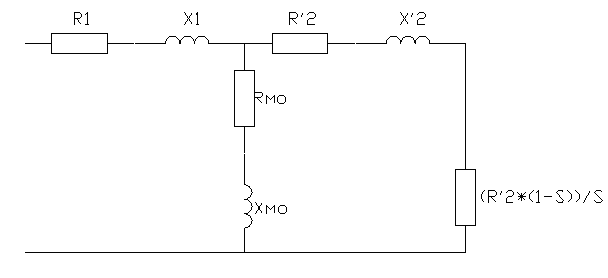
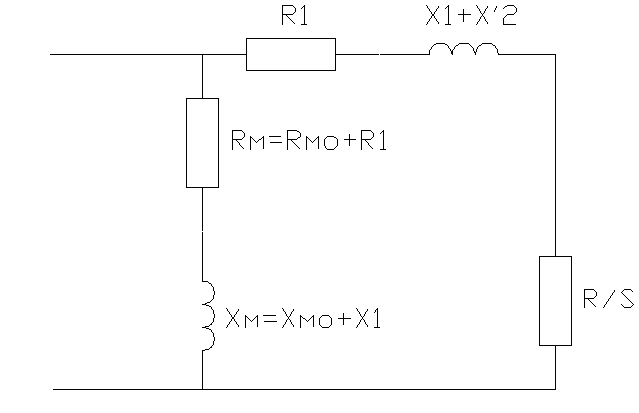
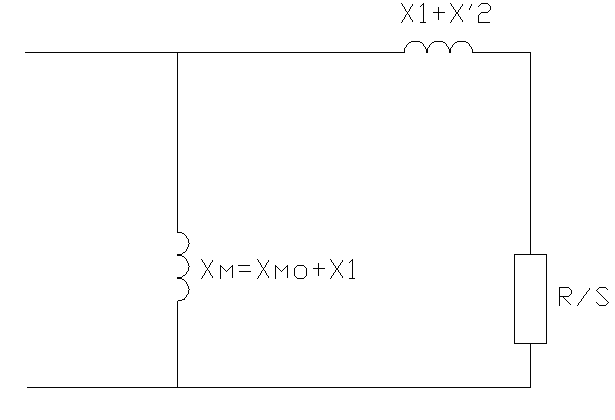
Применение той или иной схемы зависит от требуемой точности. Чаще всего применяют Г-образную схему (вторая по счету)
3) Трансформатор
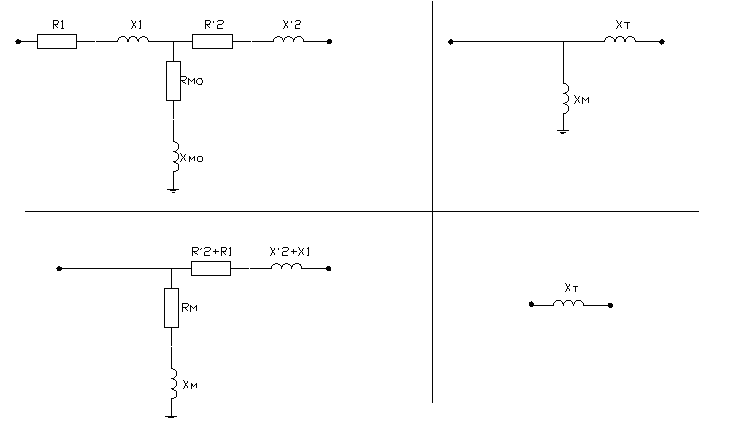
Как правило одним сопротивлением X.
4)Нагрузка
В некоторых случаях нагрузка учитывается в виде асинхронного двигателя (Г-образная схема). Иногда применяется обобщенная нагрузка, и нагрузка замещается статическими характеристиками Pн = f(U) и Qн = f(U) .В некоторых случаях применят динамические характеристики нагрузки.
Структурные схемы.
В ряде случаев при изучении ПП и устойчивости целесообразно представлять изучаемую электрическую систему в виде функциональной структурной схемы, на которой показаны основные физические элементы и связи между ними. Такая регулируемая система включает как механические элементы - первичный двигатель, автоматический регулятор скорости и т.д., так и электрические элементы – генератор, его автоматический регулятор возбуждения и систему возбуждения, передающую систему, нагрузку.
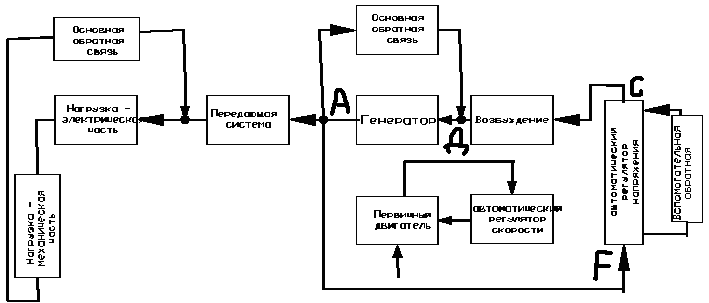
Прямые связи между основными элементами, передающие рабочий поток энергии системы. Обратная связи – дают на входе элемента некоторую дополнительную энергию. Основная силовая обратная связь (АД) проявляется в непосредственном влиянии нагрузки на элементы, генерирующие и потребляющие электроэнергию. Обратная связь (цепь АFC) осуществляется регулирующими устройствами. Вспомогательная обратная связь действует только внутри регулирующих устройств и служит для стабилизации их работы .
6.Математические модели линий электропередачи, трансформаторов, нагрузок, регулирующих устройств в расчетах пп.
Математическая модель представляется системой дифференциальных уравнений, обычно упрощенных по сравнению с теми которые входят или должны были бы входить в общую модель.
Моделирование линий электропередачи, трансформаторов, нагрузок осуществляется путем замены реальных объектов схемами замещения с параметрами схемы замещения, которые и используются в расчетах.
1) ЛЭП, кабельные линии
Могут замещаться Т-образной или П- образной схемой замещения. В – емкостная проводимость линии, См/км
Для упрощения можно схему замещения из R и Х. Если Х в 3 и более раза больше R то можно простейшую схему.
2) Асинхронные двигатели
Применение той или иной схемы зависит от требуемой точности. Чаще всего применяют Г-образную схему (вторая по счету)
3) Трансформатор
Как правило одним сопротивлением X.
4)Нагрузка
В некоторых случаях нагрузка учитывается в виде асинхронного двигателя (Г-образная схема). Иногда применяется обобщенная нагрузка, и нагрузка замещается статическими характеристиками Pн = f(U) и Qн = f(U) .В некоторых случаях применят динамические характеристики нагрузки.
Что касается регуляторов то это просто пиздец. Их нигде нет.
Единственное что удалось найти это виды регуляторов: АРВ (автоматический регулятор напряжения), АРЧВ (автоматический регулятор частоты вращения) регулирует путем воздействия на впуск пара, АРЧ (регулятор частоты)
Функциональная схема регулятора