

Характеристика мощности при сложной связи генератора с приёмником
Зависимость P=EUsinδ/Xc справедлива для простейшей схемы электропередачи в виде чисто реактивного сопротивления Хс, теперь мы установим зависимость не накладывая никаких других ограничений на характер связи между генератором и приёмником, для этого воспользуемся методом наложения режимов, создаваемых каждой ЭДС или напряжением, действующим в цепи.
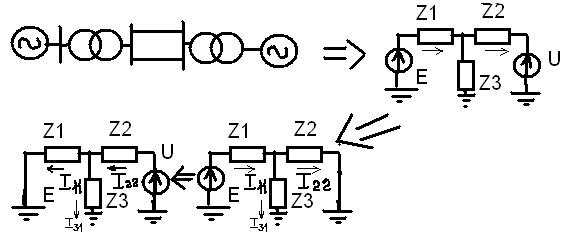
I1=I11-I12 и I2=-I22+I21; для генератора положительное значение I и P считается отдаваемые в сеть, для приёмной системы – получаемое из сети (от генератора). Собственные токи I11= E/Z11 (для генератора) I22=U/Z22=U*Y22 (для системы), где Z11, Z22, Y11, Y22 (собственные сопротивление и проводимости ветвей генераторов и системы). I12= E/Z12=E*Y21 и I12=U/Z12=U*Y12 где Z12 и Z21 – взаимные сопротивления схемы замещения Z21=Z12=Z1+Z2+(Z1*Z2)/Z3, где Z11, Z22 - определяют модуль и фазу тока данного источника при отсутствии ЭДС других источников; Z12, Z21- определяет модуль и фазу тока в ветви источника при учёте ЭДС других источников.
 Z11=Z11*
Z11=Z11* Z2=Z2*
Z2=Z2* 12=Z21=Z21*
12=Z21=Z21*
Введём угол =90-ψ, тогда
Pг=
Qг=
Pн=
Qн==
Для системы ∞ мощности условия устойчивости не существуют, т.к. U системы ост. Const и не меняется во всех режимах генератора.
14.Системы возбуждения синхронных машин и автоматические регуляторы.
А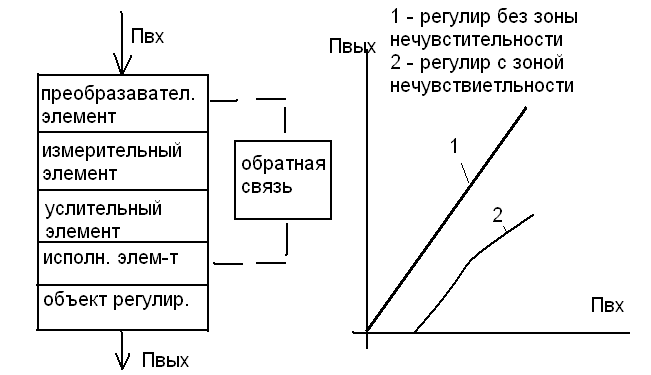 грегаты
электрических систем, т.е. генераторы
и вращающие их турбины, должны работать,
обеспечивать определенное качество
выдаваемой энергии, это достигается с
помощью регуляторов. Регуляторы
возбуждения
(АРВ) воздействуют на ток возбуждения
генераторов, обеспечивают качество
напряжения, улучшают устойчивость и
делают более благоприятным характер
переходных процессов. Регуляторы
реагируют на напряжение и частоту, ток
и мощность, замеряемые обычно на данном
генераторе или станции. Регуляторы
частоты вращения
(АРЧВ) воздействуют на впуск в турбины
энергоносителя (воды, пара) и поддерживают
частоту вращения генератора. Регуляторы
стабилизируют частоту вращения, реагируя
на её отклонение. Регуляторы
частоты
(АРЧ) реагируют на общее изменение
частоты в системе, поэтому их называют
регуляторами общесистемного параметра
в отличии от первых двух, реагирующих
на локальные параметры. Регуляторы
частоты действуют на первичный двигатель
с помощью промежуточного воздействия
на регулятор скорости. Любой регулятор
представляется виде структурной схемы,
состоящей из четырёх основных элементов
:
грегаты
электрических систем, т.е. генераторы
и вращающие их турбины, должны работать,
обеспечивать определенное качество
выдаваемой энергии, это достигается с
помощью регуляторов. Регуляторы
возбуждения
(АРВ) воздействуют на ток возбуждения
генераторов, обеспечивают качество
напряжения, улучшают устойчивость и
делают более благоприятным характер
переходных процессов. Регуляторы
реагируют на напряжение и частоту, ток
и мощность, замеряемые обычно на данном
генераторе или станции. Регуляторы
частоты вращения
(АРЧВ) воздействуют на впуск в турбины
энергоносителя (воды, пара) и поддерживают
частоту вращения генератора. Регуляторы
стабилизируют частоту вращения, реагируя
на её отклонение. Регуляторы
частоты
(АРЧ) реагируют на общее изменение
частоты в системе, поэтому их называют
регуляторами общесистемного параметра
в отличии от первых двух, реагирующих
на локальные параметры. Регуляторы
частоты действуют на первичный двигатель
с помощью промежуточного воздействия
на регулятор скорости. Любой регулятор
представляется виде структурной схемы,
состоящей из четырёх основных элементов
:
Регуляторы возбуждения и частоты, применяемые в настоящее время, являются в основонм регуляторами без зоны нечувствительности, осуществляющими непрерывное регулирование. При этом воздействие регулятора на исполнительный элемент Пвых пропорционально откллонению подлежащего регулированию параметра Пвх. Разновидностью пропорционального АРВ являются два вида компаундирования синхронных генераторов:
- токовое компаундирование (осуществляющее непрерывную функциональную зависимость тока возбуждения генератора от тока нагрузки)
- фазовое компаундирование (осуществляющее непрерывную функциональную зависимость от тока нагрузки и его фазового сдвига относительно напряжения генератора).
На крупных генераторах, работающих в энергосистеме, в настоящее время применяются непрерывного регулирования. Они подразделяются на:
1 пропорционального действия (изменяют ток возбуждения пропорционально отклонению какого-то параметра)
2 сильного действия (реагируют не только на отклонение параметров режима, но также и на скорость и ускорение их изменений, причём в системе возбуждения, в которую как составляющая входит АРВ СД, элементы должны обладать малой инерционностью, что позваляет получить быстро изменяющийся ток возбуждения.