

43 Методы решения динам задач.Статич,энергетич.
Основными методами динамического расчета являются статический и энергетический.
Статический метод основан на применении уравнений динамического равновесия, которые отличаются от уравнений статического равновесия наличием дополнительных сил инерции.
Энергетический метод основан на законе сохранения энергии: сумма потенциальной и кинетической энергии упругой системы является величиной постоянной в любой рассматриваемый момент времени.
Трудоемкость динамического расчета сооружений зависит, в первую очередь, от числа степеней свободы.
44 Диф урав-ия системы с однои степ свободы.
Р ассмотрим
систему с одной степенью свободы (рис.
1.5). Если к ней приложена статическая
нагрузка
ассмотрим
систему с одной степенью свободы (рис.
1.5). Если к ней приложена статическая
нагрузка
![]() ,
то балка изогнется и масса
,
то балка изогнется и масса
![]() сместиться на
сместиться на
![]() .
.
К огда
же к массе
приложена некоторая сила
огда
же к массе
приложена некоторая сила
![]() ,
переменная во времени, то система будет
совершать колебательные движения
относительно устойчивого положения
равновесия (рис. 1.6).
,
переменная во времени, то система будет
совершать колебательные движения
относительно устойчивого положения
равновесия (рис. 1.6).
Р ассмотрим
характер сил, действующих на систему в
любой момент времени (рис. 1.7), где
ассмотрим
характер сил, действующих на систему в
любой момент времени (рис. 1.7), где
![]() – сила инерции;
нам известно, что она определяется
величиной массы и ее ускорением:
– сила инерции;
нам известно, что она определяется
величиной массы и ее ускорением:
![]() ,
,
![]() –
независимый
параметр, определяющий положение
массы в любой момент времени;
–
независимый
параметр, определяющий положение
массы в любой момент времени;
![]() – восстанавливающая
сила, отражающая упругие свойства
системы, принято считать, что
– восстанавливающая
сила, отражающая упругие свойства
системы, принято считать, что
![]() ,
,
![]() – реакция системы при единичном смещении;
– реакция системы при единичном смещении;
Для рассматриваемого случая коэффициент определиться из выражения:
![]() ,
где
,
где
![]() – перемещение балки в месте расположения
массы
от силы
– перемещение балки в месте расположения
массы
от силы
![]() .
Тогда
.
Тогда
![]() и
и
![]() .
.
![]() – сила сопротивления,
при этом различаем силы внутреннего
сопротивления (внутреннее трение),
связанные со свойствами материала и
силы внешнего сопротивления –
сопротивление окружающей среды. Единой
теории, описывающей внутреннее
сопротивление не существует, в ряде
случаев оказывается пригодной теория
Вольдемара Фойгта (1850-1919 гг.), по которой,
в упрощенном виде, можно принять, что
– сила сопротивления,
при этом различаем силы внутреннего
сопротивления (внутреннее трение),
связанные со свойствами материала и
силы внешнего сопротивления –
сопротивление окружающей среды. Единой
теории, описывающей внутреннее
сопротивление не существует, в ряде
случаев оказывается пригодной теория
Вольдемара Фойгта (1850-1919 гг.), по которой,
в упрощенном виде, можно принять, что
![]() ,
,
![]() – коэффициент вязкости материала.
– коэффициент вязкости материала.
Запишем условие
динамического равновесия системы:![]() или
или
![]() .
.
Запишем в более
удобном виде:![]() .
.
Исследуем некоторые частные случаи колебания системы с одной степенью свободы.
45 Свобою колеб. Системы с однои степ свободы.
Напомню, что свободными колебаниями системы называются такие, которые происходят при отсутствии внешней нагрузки – возмущающей силы. Другими словами, к упругой системе в какой-то период времени была приложена возмущающая нагрузка , система была выведена из состояния равновесия, а затем действие нагрузки прекратилось. В этом случае упругая система будет продолжаться колебаться относительно первоначального положения равновесия.
Предположим, что
силы сопротивления настолько малы, что
ими можно пренебречь, т.е.
![]() ,
что отвечает, естественно только идеально
упругой системе.
,
что отвечает, естественно только идеально
упругой системе.
Уравнение динамического равновесия, с учетом высказанных выше предположений, примет следующий вид:
![]() или
или
![]() ,
где
,
где
![]() .
.
Пришли к обыкновенному
дифференциальному уравнению второго
порядка с постоянными коэффициентами,
решение которого хорошо известно (Э.
Камке. Справочник по обыкновенным
дифференциальным уравнениям. М. Наука,
1971, стр.365):![]() .
.
Постоянные
интегрирования
![]() найдем из начальные условий (условий
при
найдем из начальные условий (условий
при
![]() ):
):![]()
Тогда:![]() ,
откуда
,
откуда
![]() ;
;![]() ,
откуда
,
откуда
![]() .
.
Окончательно
решение имеет следующий вид:![]() .
.
Полученное решение описывает простое гармоническое движение.
Более наглядное
представление о характере колебаний
можно получить, если перейти к другим
константам интегрирования (![]() и
и
![]() ),
следующим образом связанных с
:
),
следующим образом связанных с
:
![]() ,
,
![]() или
или
![]() ,
,
![]() .
.
Тогда решение
запишется в следующем виде:![]() .
.
Принято называть:
– амплитуда колебаний, т.е. максимальное отклонение колеблющейся массы от положения статического равновесия;
– начальный угол сдвига фазы колебаний;
– круговая или угловая частота колебаний, рад/сек.
Оказалось удобным ввести еще ряд характеристик колебаний:
![]() – период колебаний,
т.е. время одного колебания,
,
так как период тригонометрических
функций равен
– период колебаний,
т.е. время одного колебания,
,
так как период тригонометрических
функций равен
![]() ;
;
![]() – техническая
частота колебаний, определяет число
колебаний в секунду.
– техническая
частота колебаний, определяет число
колебаний в секунду.
На рис. 1.8 показаны основные элементы гармонических свободных незатухающих колебаний.
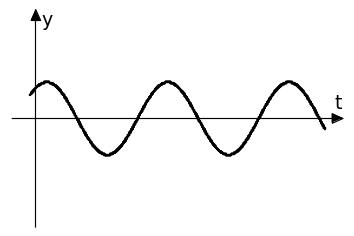
Свободные колебания системы с одной степенью свободы являются собственными колебаниями, т.е. периодическими колебаниями по гармоническому закону с одной частотой, форма колебаний, ей отвечающая, называется собственной или главной формой колебаний.
Запишем выражения
для частот и периодов собственных
колебаний, имея в виду, что
![]() ,
где
,
где
![]() – ускорение свободного падения.
– ускорение свободного падения.
Круговая частота
![]() .
.
Обозначим
![]() и тогда получим, что
и тогда получим, что
![]() .
.
Период колебаний:![]() /
/
Техническая
частота:![]() .
.
Частота и период представляют собой основные динамические характеристики системы. Это связано с тем, что для системы с одной степенью свободы, как видно, эти характеристики не зависят от начальных условий, в то время, как амплитуда колебаний и начальный сдвиг фазы колебаний зависят от них.
Очевидно, что исследование незатухающего процесса колебаний дает лишь приближенное представление о реальной работе системы с одной степенью свободы. В любой упругой среде происходит поглощение-рассеивание энергии.