

20.3 Принципы построения и структуры
Микропроцессорное устройство ЧПУ является вычислительной системой, которая строится с использованием универсальных средств вычислительной техники и специализированных схем или блоков, обеспечивающих связь с объектом управления.
Введем некоторые определения для аппаратных средств микропроцессорных УЧПУ.
Микропроцессор (МП) — программно-управляемое устройство, осуществляющее процесс обработки информации и управление этим процессом и построенное на одной или нескольких БИС.
Микропроцессорная система (МПС) — вычислительная система, включающая в себя процессор, запоминающее устройство (ЗУ), расширители арифметических функций (РА), объединяемые термином вычислитель (ВЧС), и контроллеры внешних устройств. Обмен информацией между блоками МПС осуществляется по специальному каналу обмена (системной магистрали).
Контроллер внешнего устройства (КВУ) — устройство, включающее в себя схемы сопряжения внешнего устройства (ВУ) с системной магистралью (интерфейс) и схемы преобразования входных и выходных данных внешнего устройства. Во многих устройствах ЧПУ КВУ выполняются с использованием специализированных, так называемых «потребительских» БИС, ориентированных на выполнение определенной функции, например преобразования сигналов датчика положения в код. Зачастую функции КВУ достаточно сложны и требуют такой степени адаптации к объекту и пользователю, что КВУ выполняется на базе специализированной МПС.
Расширители стандартных функций микропроцессорных УЧПУ необходимы для повышения производительности МПС при выполнении операций, входящих в базовый набор арифметических функций. Наиболее часто выполняемая в микропроцессорных УЧПУ арифметическая функция — умножение слов длиною в 16 и 32 разряда, как правило, требует такого расширителя. Микропроцессор, память, расширители стандартных функций, объединенные системной магистралью, составляют вычислительное ядро, или вычислитель микропроцессорной системы (рис. 20.1), с которым сопрягаются внешние устройства, необходимые для управления объектом и связи с оператором. При использовании однопроцессорного вычислителя возможны две основные структуры. В структуре с общей магистралью (рис. 20.1, а) все контроллеры внешних устройств сопрягаются с вычислителем через эту магистраль. В этой структуре нагрузочная способность системной магистрали (СМГ) ВЧС ограничивает возможности расширения системы из-за ухудшения помехоустойчивости. Для улучшения этих характеристик нередко используется вариант однопроцессорной структуры с двумя магистралями (рис. 20.1, б), сопряжение между которыми осуществляется через специальное устройство согласования магистралей — адаптер. В этой структуре КВУ оператора (дисплея и клавиатуры) сопрягаются обычно с магистралью ВЧС, а КВУ объекта (электроприводов, датчиков состояния объекта, устройств управления электроавтоматикой) сопрягаются с магистралью УЧПУ (СМГ УЧПУ).
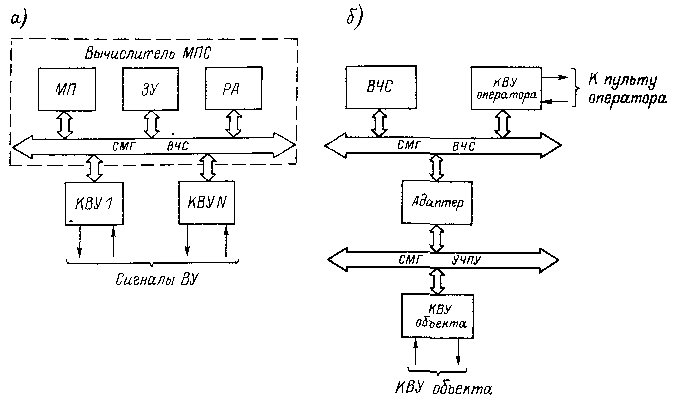
Рис. 20.1 Структуры однопроцессорных УЧПУ
Использование однопроцессорной структуры двумя магистралями оказывается эффективным потому, что КВУ объекта для связи несколькими однотипными внешними устройствами обычно выполняется на одной плате и является по отношению к магистрали одной единицей нагрузки.
Уже в однопроцессорных УЧПУ в полной мере определились основные принципы организации МПС УЧПУ, обеспечивающие возможность расширения системы при сохранении функциональной гибкости и обеспечении надежности функционирования при малом времени восстановления в случае отказа. К их числу относятся:
принцип программно-аппаратной реализации функций управления, в соответствии с которым основными функциями аппаратных средств КВУ являются функции преобразования информации вычислителя в сигналы управления объектом и обратное преобразование сигналов состояния объекта в машинную форму, а обработка информации производится программными средствами вычислителя
магистрально-модульный принцип построения аппаратных средств, в соответствии с которым аппаратные средства, входящие в состав базовой конфигурации микропроцессорного УЧПУ, выполняются в виде унифицированных по конструкции модулей и имеют унифицированные средства сопряжения с системными магистралями;
принцип «встроенной» диагностики аппарата УЧПУ, в соответствии с которым каждый блок, входящий в ВЧС или КВУ, имеет свои аппаратные диагностические средства, что позволяет быстро локализовать неисправности и снизить время восстановления устройства в случае отказа.
Однопроцессорные УЧПУ накладывают ограничения на количественное и качественное расширение функциональных возможностей и надежность управления локальными устройствами ЧПУ, обусловленные следующими причинами:
1. Ограничение вычислительной мощности процессора. Даже чисто количественное увеличение выполняемых МПС одинаковых функций, например числа управляемых осей исполнительных устройств объекта, имеющее место в тяжелых и уникальных станках с ЧПУ, приводит к недопустимому увеличению загрузки процессора.
2. Ограничение возможностей привязки микропроцессорного УЧПУ к объекту. Эти ограничения связаны с проблемой управления устройствами электроавтоматики. Если схема ЭЛА является сравнительно простой, то обработка дискретных входных сигналов и управление дискретными выходами ЭЛА возлагаются на МПС устройства ЧПУ. Однако для объектов со сложной схемой ЭЛА такое решение обычно неэффективно. В этом случае функции привязки осуществляются специальным командоаппаратом. Если такой командоаппарат выполняется на базе МПС, то он называется программируемым контроллером (ПК). В настоящее время ПК является наиболее универсальным средством автоматизации устройств автоматики во многих отраслях промышленности. В области систем управления ГПС на основе этих контроллеров строится управление транспортно-накопительными системами.
3. Ограничение, связанное с тем обстоятельством, что локальный объект автоматизации в ГПС по природе своей является пространственно-распределенным объектом. В большей или меньшей степени это справедливо для станков, роботов и ТСС. Естественным является стремление выполнять отдельные компоненты УЧПУ в виде функционально и конструктивно завершенных модулей, имеющих минимальное число линий связи с другими модулями и максимально приближенных к управляемому объекту. Но это выполнимо только в том случае, если каждый из модулей будет иметь свою локальную МПС (ЛМПС), обладающую возможностью обмена с другими ЛМПС, входящими в общую мультимикропроцессорную структуру.
4. Ограничение, связанное с конечной нагрузочной способностью системной магистрали. Увеличение вычислительной мощности процессора целесообразно, если можно расширять Число модулей, подключаемых к СМГ без снижения надежности обмена данными. На практике это условие оказывается значительно более жестким, нежели ограничение вычислительной мощности процессора. Из сказанного следует, что переход к мультимикропроцессорным структурам УЧПУ является объективной тенденцией развития этого класса устройств. В настоящее время распространены мультимикропроцессорные (ММПС) УЧПУ, в которых увеличение функциональных возможностей достигается в результате применения в качестве ЛМПС однородных по элементной базе функционально законченных микропроцессорных модулей, каждый из которых решает собственную вычислительную задачу. Различие функций, выполняемых модулями, определяется различием ПО, занесенного в ЗУ ВЧС, входящих в состав этих модулей. Такой подход позволяет создавать модульные микропроцессорные УЧПУ, расположенные в одном блоке или же распределенные по конструктивным блокам системы управления. При расположении микропроцессорных модулей ММПС в одном блоке агрегатирование отдельных вычислителей осуществляется с использованием двухпортовых блоков общей памяти (БОП) в соответствии с рис. 20.2. Центральный вычислитель (ВЧС) УЧПУ связан через системную магистраль СМГ с КВУ (ими могут быть контроллер дисплея и клавиатуры пульта) и локальными вычислителями (ВЧС1—B4CN), имеющими собственные системные магистрали ЛСМГ и решающими конкретные функциональные задачи, например управления приводами и ЭЛА. Связь через двухпортовые БОП обеспечивает наименьшие потери производительности ММПС, обусловленные конфликтами при одновременном обращении вычислителей к БОП. Учитывая сравнительно малую интенсивность обмена данными между локальными ВЧС и центральным ВЧС, БОП может быть совмещен с оперативным запоминающим устройством локального вычислителя. При использовании параллельного обмена в рассмотренной структуре потери производительности, обусловленные временем обмена, становятся пренебрежимо малыми.
Большая пропускная способность требуется от канала обмена данными, при использовании структуры ММПС, способной обеспечить функциональные возможности, аналогичные тем, которые обеспечивает структура на рис. 20.2, но в распределенном по конструктивным блокам варианте. Вариант структуры «распределенного» УЧПУ приведен на рис. 20.3.
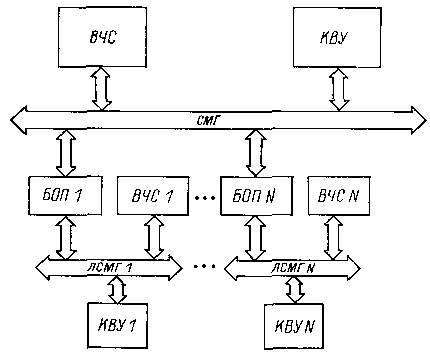
Рис. 20.2 Структура многопроцессорного УЧПУ с обменом через БОП
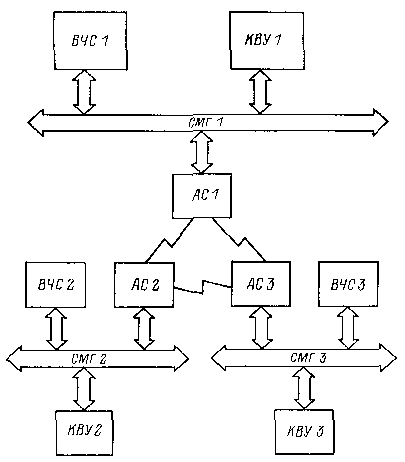
Рис. 20.3 Структура многопроцессорного УЧПУ с обменом через адаптеры связи
В отличие от предыдущей в этой структуре микропроцессорные вычислители имеют равные возможности обмена данными. Обмен осуществляется через адаптеры связи АС1 — АСЗ, подключенные к системным магистралям соответствующих вычислителей и имеющие выходы на два последовательных канала обмена. Несомненным достоинством рассмотренной структуры является конструктивная автономность локальных ВЧС, возможность их встраивания в аппаратуру, расположенную в различных местах общей системы управления при минимальном числе линий обмена и хорошей, а в перспективе при использовании оптических каналов обмена — идеальной помехозащищенности. Недостаток структуры — ограниченная пропускная способность последовательно канала обмена.
Комбинируя принципы построения мультимикропроцессорных структур, можно получить оптимальную по выбранному критерию структуру, удовлетворяющую требованиям использования в конкретном УЧПУ.