

7 Импульсные системы чпу.
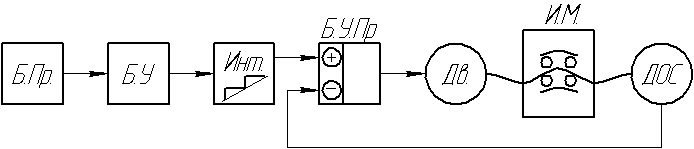
Рис. 7.1 Блок схема импульсной системы ЧПУ
Рассмотрим импульсную систему ЧПУ. В этих системах используются круговые или линейные, импульсные ДОС.
Линейные датчики в системах ЧПУ, как правило, используется на станках повышенной точности, т.к. в этом случае исключаются погрешности механических передач, и точность отсчета координат зависит только от точности ДОС.
При подаче управляющего сигнала, импульса на блок управления приводом (БУПр) – специальный электронный блок (типа реверсивный счетчик), который обеспечивает алгебраическое суммирование импульсов от блока управления (БУ) и ДОС. БУПр инициирует работу двигателя до тех пор, пока состояние блока сравнения (БС) не будет = 0.
В силу имеющихся сопротивлений как инерционных, так и установившихся, исполнительный механизм не способен мгновенно отрабатывать управляющие сигналы, поэтому в БС имеется всегда разница информации управления и информации ОС, составляющая ошибку управления. Ошибка управления влияет на точность обрабатываемого контура, поэтому ее величина должна быть строго определенной, согласно заданной точности обработки на станке. При ее превышении этого уровня происходит блокировка работы станка.
7.1 Импульсные датчики обратной связи
Оптические датчики по сравнению с аналоговыми обеспечивают большую точность и лучше согласуются с системами ЧПУ, поэтому в новых системах ЧПУ они получили преимущественное применение.
Датчик позволяет получить информацию о величине и направлении перемещения. Величина перемещения определяется числом импульсов, выдаваемых датчиком, а направление — каналом, по которому поступают эти импульсы.
Линейный (рис. 7.2, а) и круговой (рис. 7.2, б) оптические датчики состоят из механической, оптической и электронной систем.
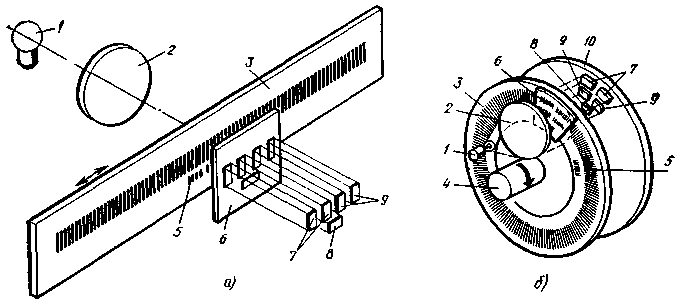
Рис. 7.2 Линейный (а) и круговой (б) оптические датчики:
1 — осветитель, 2 — линза, 3 — шкала, 4 — вал, 5 — риски нуль-метки, 6 — съемник, 7 — фотодиоды (сигнал Ie1), 8 - фотодиод нуль-метки (сигнал Ie1), 9 - фотодиоды (сигнал Ie1), 10 — корпус
Механическая система обеспечивает точное перемещение шкалы с рисками относительно съемника. Корпус защищает датчик от проникновения пыли, влаги и от механических воздействий. Оптическая система содержит фотодиод, линзу, съемник с растровыми штрихами и основную шкалу в виде диска (для кругового датчика) или линейки (для линейного датчика). При движении шкалы меняется световой поток, идущий через растровые риски съемника, и через фотодиоды проходит ток (рис. 7.3, а). Шкала и съемник создают в паре обтюрационное растровое сопряжение. На съемнике растры расположены в два сектора, сдвинутые друг относительно друга на 1/4 шага штрихов. Напротив каждого из секторов съемника расположена пара фотодиодов, которые выдают первичные сигналы, изменяющиеся (при смещении шкалы относительно съемника) по синусоидальному и косинусоидальному закону (рис. 7.3, а). Первичные сигналы всех трех каналов (Ie1, Ie2, Ie3) поступают на входы усилителей, выполненных на интегральных микросхемах. На каждом канале имеется два фотодиода, включенные встречно, чем достигается компенсация постоянной составляющей сигнала. Затем усиленные сигналы и сигнал начала отсчета подаются на входы формирователей, преобразующих синусоидальные сигналы в прямоугольные (Ua1, Ua2, Ua3) (рис. 7.3, б и в) амплитуда которых не зависит (в определенных пределах) от изменения амплитуды первичных синусоидальных сигналов, а период которых соответствует периоду синусоидальных сигналов.
Для получения прямых и инвертированных сигналов каждого канала служат выходные каскады (на транзисторах).
Увеличение числа импульсов на единицу перемещения (уменьшение дискретности) достигается электронной схемой, формирующей импульсы с переднего и заднего фронтов обеих последовательностей (рис. 7.3, б и в), таким образом достигается учетверение частоты импульсов. Помимо этого в оптический датчик может встраиваться блок интерполяции сигналов, выполняющий дополнительное деление на 5 или 10. Шкалы датчиков также выполняются с различной дискретой. Например, круговой оптический датчик мод. ВЕ-191 имеет модификации с числом импульсов на один оборот вала датчика, равным 250 (основное исполнение); 1000; 1024; 1800; 2500 и 5000.
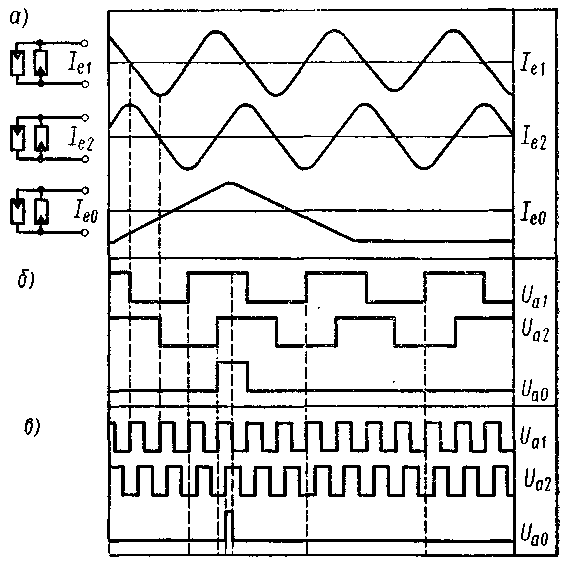
Рис. 7.3 Диаграмма сигналов оптического датчика:
а – сигнал на выходе фотодиодов, б – то же, на выходе усилителя-формирователя, в – то же, после деления на 4
Кроме привода подач круговые оптические датчики используются в электронных штурвалах (рис. 7.4), предназначенных для ручного перемещения механизмов. При повороте лимба, связанного с оптическим датчиком, в УЧПУ поступают (от датчика) импульсы, управляющие приводом. Каждый импульс соответствует перемещению механизма на единицу дискреты. Таким образом, электронный штурвал выполняет функцию управляющей программы. Число импульсов, выдаваемых датчиком штурвала, определяется углом поворота лимба, а частота этих импульсов — скоростью его вращения.
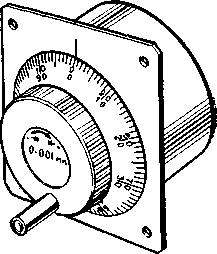
Рис. 7.4 Электронный штурвал (общий вид)