

5 Разомкнутые системы. Дискретный (шаговый) двигатель подачи
Первый вид систем программного управления составляют разомкнутые системы. Характерной особенностью этих систем является наличие только одного потока информации, направленного от устройства, считывающего программы, к исполнительному устройству (рис. 5.1).

Рис. 5.1 Блок-схема разомкнутой системы ЧПУ:
1 — считывающее устройство; 2 — программоноситель (перфолента); 3 — электронный кодовый преобразователь; 4 — шаговый двигатель; 5 — следящий золотник; 6 — гидравлический двигатель; 7— редуктор; 8 — стол станка; 9 —местная жесткая обратная связь
При вводе программоносителя в считывающее устройство, на выходе последнего появляются командные сигналы. После необходимых преобразований электронный блок управляет шаговым приводом и исполнительным устройством, которое перемещает рабочий орган станка в заданное положение. Соответствие действительного перемещения заданному при этом не контролируется. Примером подобных систем могут служить широко распространенные системы, использующие в качестве привода подач рабочих органов станка шаговые двигатели или шаговые двигатели с гидроусилителями. Схема, изображенная на рис. 5.1, реализована на серийно выпускаемых отечественных фрезерных станках мод. 6Н13-ГЭ2, изготовляемых Горьковским заводом фрезерных станков, а также на станках иностранных фирм, использующих системы программного управления типа «Sinumrrik-520» фирмы Siemens (ФРГ) и др.
Принцип работы разомкнутых систем ЧПУ заключается в том, что в качестве исполнительного механизма применяется шаговый двигатель, обеспечивающий перемещение исполнительного механизма на определенную величину на каждый управляющий сигнал унитарного кода интерполятора.
Шаговый двигатель (ШД) – это электрическая машина, имеющая зубчатый ротор и группу обмоток на статоре, обеспечивающие при определенном управлении (коммуникации) обмотками статора дискретное движение ротора.
5.1 Дискретный (шаговый) двигатель подачи
Привод подач с шаговыми двигателями (ШД) можно разделить на две группы:
1) привод с силовым ШД, соединенным через кинематическую цепь с исполнительным механизмом;
2) привод с управляющим ШД и промежуточным усилителем момента, выполненным в виде автономной следящей системы (обычно гидравлической).
В первой группе динамические и статические характеристики привода определяются параметрами ШД, во второй — зависят от параметров следящей системы, которой управляет ШД.
Преимущества шагового привода по сравнению с приводом следящим имеют значение лишь при малых мощностях приводов. К таким преимуществам относятся отсутствие датчика обратной связи по пути и тахогенератора, а также отсутствие коллектора с щетками. Именно это обусловило применение ШД в приводе подач малых токарных и шлифовальных станков, а также для управления различными вспомогательными механизмами (поворот и смещение план-суппортов, резцедержателей и т.п.) станков и гибких производственных модулей.
Современные быстродействующие ШД являются модифицированными синхронными электрическими машинами, обмотки которых возбуждаются несинусоидальными сигналами, т. е. прямоугольными или ступенчатыми импульсами напряжения с изменяющейся в широких пределах частотой. Ступенчатому характеру напряжений на фазах ШД соответствует дискретное вращение электромагнитного поля в воздушном зазоре двигателя. Вследствие этого движение ротора на низкой частоте слагается из последовательности элементарных перемещений, совершаемых по апериодическому или колебательному закону. При возрастании управляющей частоты неравномерность частоты вращения ротора ШД сглаживается.
Шаговые двигатели с электронным коммутатором осуществляют преобразование последовательности управляющих импульсов (унитарного кода) в угол поворота вала. Каждому импульсу управления соответствует поворот вала на фиксированный угол (шаг двигателя), величина которого однозначно определена конструкцией ШД и способом переключения его обмоток. Частота вращения и суммарный угол поворота вала пропорциональны соответственно частоте и числу поданных импульсов управления В отличие от синхронных двигателей в ШД переход в синхронное движение из состояния покоя осуществляется без скольжения, а торможение—без выбега ротора. Благодаря этому ШД (в рабочем диапазоне частот) обеспечивают внезапный пуск, остановку и реверсирование без потери информации, т.е. без пропуска шагов.
Более легким для дискретного привода является режим плавного изменения частоты. В этом случае область частот, в которой привод устойчив, значительно расширяется. Ниже рассмотрены основные показатели, характеризующие ШД
Динамические показатели ШД повышаются при увеличении числа т фаз и числа m1 тактов коммутации. Однако при этом усложняется конструкция двигателя и возрастает число усилителей мощности, поэтому принимают m≤6. число тактов коммутации определяется схемой управления ШД и зависит от последовательности включения обмоток фаз и изменения тока (намагничивающей силы) этих обмоток. При однополярной коммутации обычно принимают m1=2m (например, наиболее распространенный в станках ШД типа ШД5Д1 имеет m=6 и m1=12)/
Для ШД с активным ротором, которые находят сейчас применение в стайках с ЧПУ, используют разнополярную коммутацию.
В результате ступенчатого изменения тока фазы в интервале 0 ≤ I ≤ Imax возможно теоретически неограниченное увеличение числа m1 тактов и соответственное уменьшение шага двигателя (электромагнитное деление шага); однако при уменьшении шага ШД увеличивается статическая погрешность двигателя относительно величины шага.
Шаг на импульс αш = 360°/(рm1),
где р = zr — число пар полюсов активного ротора;
zr— число зубцов пассивного ротора. В ШД мод. ШД5Д1 принято αш=1,5°.
Электрический шаг αэ=zrαш=360о/m1.
Электрический шаговый двигатель. Такой двигатель широко используют в приводе подач металлорежущих станков с ЧПУ. Он представляет собой синхронную машину с сосредоточенными обмотками и реактивным ротором.
Отечественные шаговые двигатели для приводов металлорежущих станков (ШД-4, ШД-5) строят по трехфазной схеме. Принцип работы такого двигателя следующий. Статор 1 (рис. 5.2, а) имеет три пары полюсов и обмоток (/ — ///). Ротор 2 также разделен на три секции, но каждая из них смещена по окружности относительно смежной на 1/3 межполюсного расстояния. Таким образом, когда полюса первой секции ротора совмещены с полюсами статора, полюса второй секции смещены относительно полюсов статора на 1/3, а полюса третьей секции — на 2/3 межполюсного расстояния.
Если в обмотки первой фазы (/) статора подан постоянный ток, а в других обмотках тока нет, то ротор двигателя установится в такое положение, что его полюс будет находиться напротив полюса статора. Если затем выключить ток в первой фазе и одновременно включить ток во второй фазе, ротор повернется на 1/3 шага (рис. 5.2, б). При последовательной подаче тока в обмотки /, //, /// ротор будет вращаться по часовой стрелке (рис. 5.2, в). Если включить фазы в обратном порядке (/, ///, //), ротор будет вращаться в обратную сторону.
Угол поворота ротора может составлять соответственно 1,5° или 3°, максимальная частота импульсов в двигателе ШД-4 с шестиконтактным включением 800 Гц. Такой двигатель обеспечивает скорость подачи (при цене импульса 0,01 мм) до 1200 мм/мин. В настоящее время разработаны и серийно выпускаются шаговые двигатели с большой частотой импульсов тока, они обеспечивают скорости подач до 5— 10 м/мин.
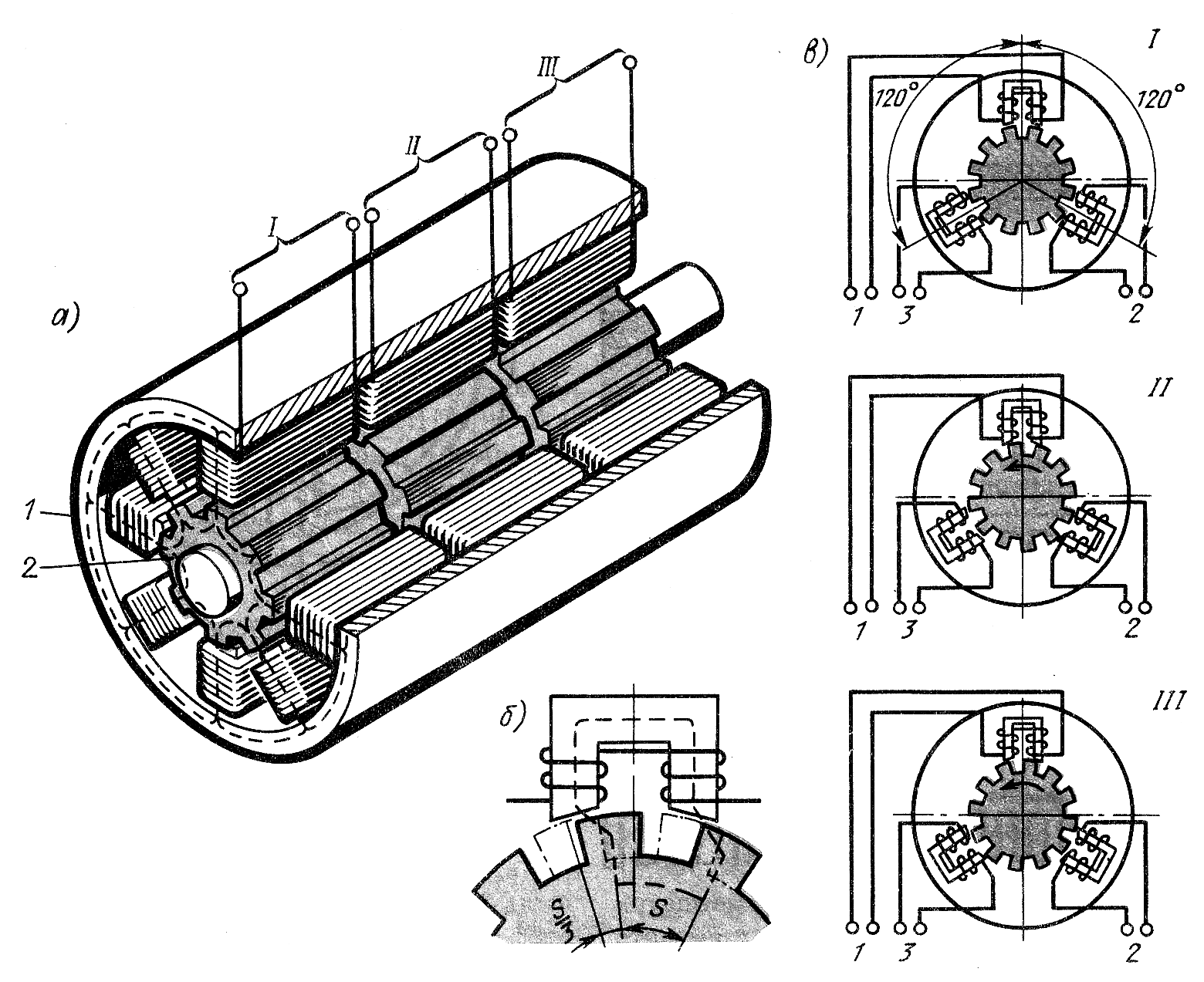
Рис. 5.2 Шаговый двигатель: а — устройство; б, в — схема действия
Электрогидравлический шаговый привод. Ввиду того, что выпускаемые шаговые электродвигатели обладают небольшой мощностью, усиление крутящего момента обеспечивают гидравлические усилители. Крутящий момент увеличивается за счет использования энергии масляного потока от гидростанции. В станках с ЧПУ используют гидроусилители момента с шаговым электродвигателем и малоинерционным высокомоментным гидроприводом.
Гидроусилитель (ГУ) представляет собой аксиально-поршневой гидромотор со следящим управлением (рис. 5.3, а). Он обеспечивает увеличение крутящего момента, развиваемого шаговым двигателем. В роторе 3 гидромотора расположены поршни 2, которые могут перемещаться в осевом направлении. Под давлением масла, поступающего в двигатель через полукольцевой паз Р1 распределителя 4, поршни 2 упираются в кольцо 1 упорного шарикоподшипника. Кольцо расположено наклонно, и поршни, скользя по наклонной плоскости, образованной подшипником, заставляют ротор поворачиваться в направлении, показанном на рисунке стрелкой. Когда поршень займет положение А, приток масла к нему прекращается, так как отверстие ротора попадает на перемычку распределителя. При дальнейшем повороте масло из-под поршня через полукольцевой паз Р2 распределителя поступает на слив. Таким образом, каждый поршень за половину оборота ротора совершает рабочий ход, а за другую половину — обратный (холостой) ход.
Для изменения направления вращения ротора масло под давлением подают в паз Р2, а из паза P1 направляют на слив. Управление потоком масла обеспечивает следящее устройство (СУ), управляемое шаговым двигателем (ШД). Вал этого двигателя соединен с плунжером 6 следящего устройства. На плунжере имеются кольцевые канавки К1 и К2 и продольные пазы П1 и П2. Плунжер вставлен во втулку 5, соединенную с валом гидроусилителя. Втулка 5 заключена в корпус 7, имеющий кольцевые канавки В1, В2, ВЗ, В4. К кольцевой канавке В2 по каналу Д подводится масло под давлением; канавки ВЗ служат для отвода масла на слив (канал С); канавки В1 и В4 соединены каналами с полостями распределителя 4. В положении, показанном на рис. 5.3, а, плунжер 6 перекрывает доступ масла к гидроусилителю, и он не работает.
Но достаточно повернуть плунжер на очень небольшой угол (рис. 5.3,6), чтобы масло от гидронасоса по каналу Д, кольцевой канавке корпуса следящего устройства и отверстию 01 втулки 5 попало в паз П1 плунжера и далее через канавки Kl, B1 и распределитель 4 в ротор гидроусилителя, поворачивая его в том же направлении, что и плунжер. Масло на слив удаляется из гидроусилителя через кольцевую канавку В4, паз П2 плунжера, отверстие 02 втулки 5, канавку ВЗ и канал С (рис. 5.3, в). Если вращать плунжер с помощью шагового двигателя непрерывно, то одновременно («догоняя» его) будет вращаться и ротор гидроусилителя, а вместе с ним и ходовой винт привода подач. Останавливаясь, плунжер перекроет отверстия втулки, движение потоков масла прекратится, и ротор гидроусилителя немедленно остановится. Для реверсирования гидроусилителя достаточно переключить направление вращения вала шагового двигателя: направление потоков масла в следящем устройстве изменится на противоположное.
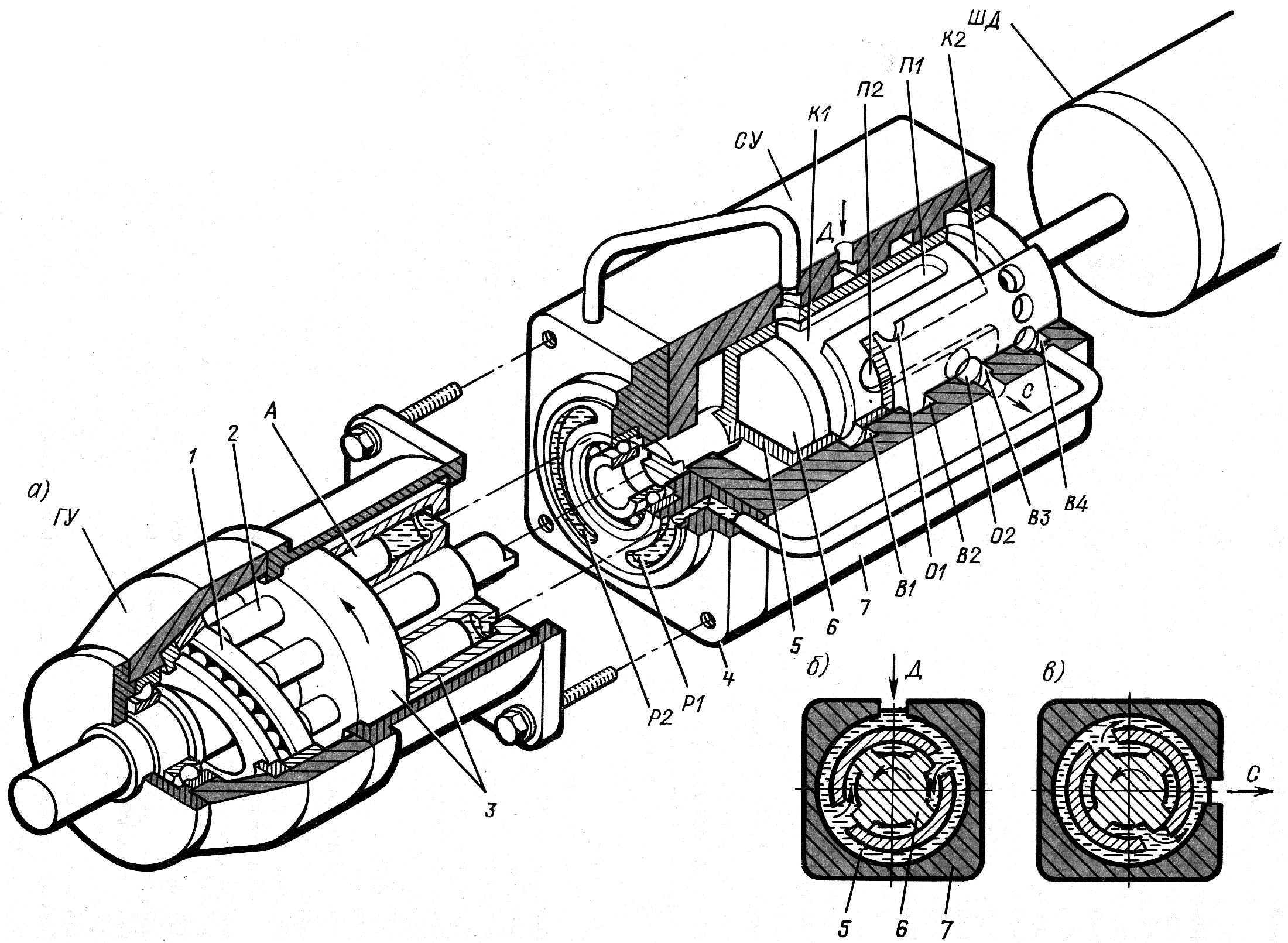
Рис. 5.3 Гидроусилитель крутящего момента

Рис. 5.4 Схема совместного применения ШД с ГУ момента
СЗ соответственно управляет потоком рабочей жидкости, подаваемой в гидромотор.
СЗ бывают двух типов:
-
поступательного перемещения;
-
поворотного перемещения;

Рис. 5.5 Принципиальная схема действия золотника для поступательного перемещения
Следящий электропривод. Основной особенностью электродвигателей, применяемых в следящих приводах, является широкий и плавный диапазон регулирования скоростей с изменением направления вращения. Наибольшее распространение для этих целей получили электродвигатели постоянного тока, обладающие наряду с плавностью регулирования скоростей в широком диапазоне и достаточно высоким КПД.
Регулируемый электропривод постоянного тока для механизмов главного движения станков с ЧПУ обеспечивает возможность выбора скорости резания с любым знаменателем ряда, коррекцию скорости во время резания с применением адаптивных устройств, упрощение управления изменением скорости.
В ряде новых моделей станков в механизмах главного движения установлен привод с тиристорными преобразователями.
В СССР разработаны серии следяще-регулируемых тиристорных электроприводов и для механизмов подач станков с ЧПУ.
Помимо быстродействующих электроприводов постоянного тока в станках с ЧПУ применяют и регулируемые электроприводы переменного тока.
Недостатки разомкнутых систем.
-
Отсутствие контроля за выполнением команд по перемещению исполнительного механизма.
-
Грубая дискретность.
Шаг ходового винта tхв = 6 мм.
Дискрет 240.
![]()
-
Низкие скорости как холостых, так и рабочих перемещении.
Достоинства.
-
простота конструкции,
-
дешевизна,
-
простота в ремонте.