

8.1 Фазовые датчики обратной связи
В основном электромагнитного типа. Они основаны на принципе электромагнитной индукции и подразделяются на вращающиеся; трансформаторы (резольверы) и индуктосины.
Вращающийся трансформатор (ВТ) имеет на статоре две обмотки, взаимно сдвинутые в пространстве на 90 электрических градусов (т. е. на 1/4 периода). Статорные обмотки питаются двухфазным напряжением переменного тока со сдвигом фаз 90°. Обмотки» статора создают в воздушном зазоре электродвигателя пульсирующее магнитное поле. В бесконтактных ВТ ротор выполняется реактивным, а вторичная (выходная) обмотка расположена на статоре (рис. 8.4). На вторичной (выходной) обмотке ВТ выдается сигнал, соответствующий сдвигу оси пульсирующего магнитного поля относительно оси ротора, связанного с валом двигателя или ходовым винтом. Этот сигнал поступает на схему фазового детектора и усилителя. ВТ обеспечивает точность измерения угла ±5°.
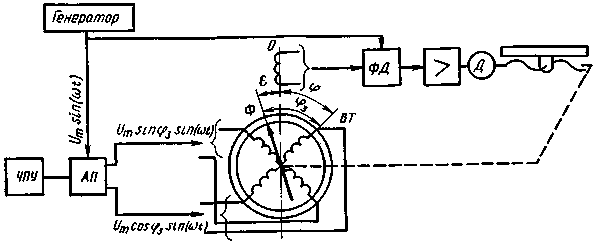
φЗ — угол поворота оси поля относительно оси обмотки, ε — угол рассогласования, О — ось выходной обмотки
В случае необходимости увеличения точности измерения применяют индуктосины, которые, так же как и оптические измерительные преобразователи, выполняются линейными и круговыми.
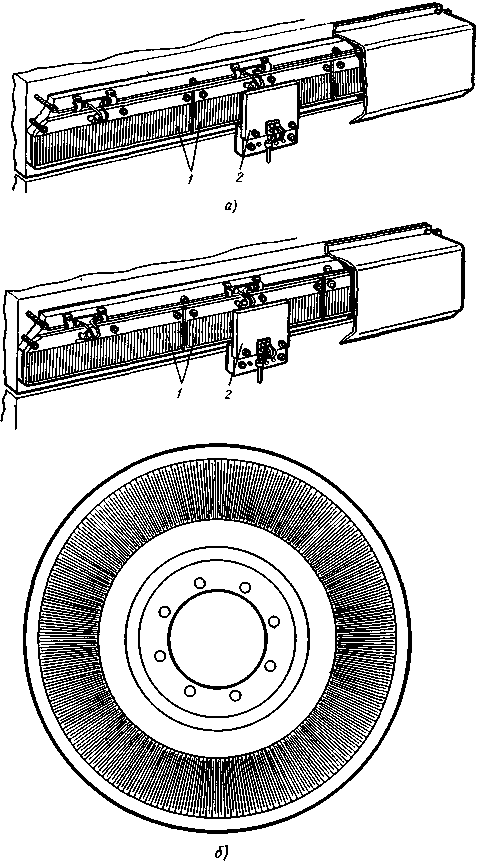
Рис. 8.5 Линейный (а) и круговой (б) индуктосины:
1 — шкала, 2 — головка
Индуктосин (рис. 8.5) состоит из шкалы (линейной или круговой) и головки, перемещающейся (с зазором) относительно шкалы. На шкале и головке нанесены (фотохимическим способом) плоские обмотки (с шагом, обычно равным 2 мм). Индуктосин фактически является развернутым в плоскости вращающимся трансформатором. На головке имеются две обмотки, сдвинутые друг относительно друга на ¼ периода (рис. 8.6, в). Принцип работы индуктосина основан на явлении электромагнитной индукции (рис. 8.6, а). Изменение напряжения на выходе при сдвиге головки относительно шкалы поясняется на рис. 8.6, б.
Индуктосин, так же как и ВТ (резольвер), в зависимости от схемы питания может работать в двух режимах — с амплитудной и с фазовой модуляцией питающего напряжения; в первом случае создается пульсирующее, а во втором — смещающееся в пространстве магнитное поле.
При амплитудной модуляции обмотки возбуждения на головке питаются синусоидальными напряжениями U1 и U2 совпадающими по фазе, но разной амплитуды (см. рис. 8.6, в). Амплитуды этих напряжений изменяются (во времени) синусоидально с круговой частотой ω и имеют различную величину, определяемую заданным углом φ, т.е.
U1=Umsin ωt sinφ; U2=Umсos ωt cosφ
где Um— амплитудное значение напряжения питания;
t — время.
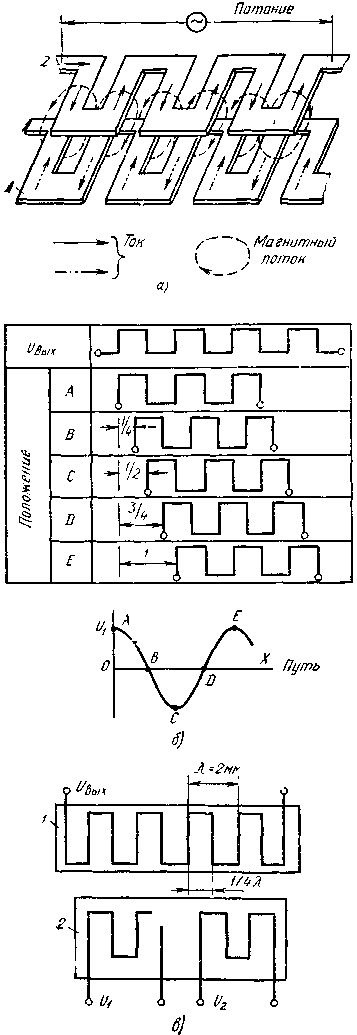
Рис. 8.6 Взаимное расположение обмоток индуктосина (а); напряжение на выходе при сдвиге головки относительно шкалы (б), обмотки шкалы и головки (в):
1 — шкала, 2 — головка
При сдвиге (или повороте) головки относительно шкалы (в пределах шага шкалы) напряжение на выходе изменяется по синусоидальному закону:
Uвых=kUmsinωt sin(ψ-pφ)
где к — коэффициент трансформации; р = 1 (для линейного индуктосина) и 180 (для кругового индуктосина)—число пар полюсов преобразователя;
φ — угол поворота ротора относительно статора (для кругового индуктосина) и φ = 360°x/λ (для линейного индуктосина);
х — величина перемещения;
λ — период обмотки (см. рис. 8.6, в).
В режиме фазовой модуляции питание обмоток возбуждения производится напряжением переменного тока равной амплитуды, но сдвинутыми по фазе на 90°, т.е.
U1=Um sin ωt; U2=Um cos ωt
Выходное напряжение определяется по формуле:
Uвых=kUmsin(ωt+pφ)
Индуктосин не имеет ферромагнитной системы. Для увеличения выходного сигнала частота питания принимается равной нескольким килогерцам. Индуктосин должен иметь защиту, исключающую попадание ферромагнитной пыли. С индуктосином может работать большинство микропроцессорных УЧПУ (мод. 2С85, 2С42, 2Р32 и др.).