

Уравнение равновесия системы сил, произвольно расположенных на плоскости.
Пара сил – две равные параллельные и противоположно направленные силы.
Момент пары сил – момент, равный произведению одной из этих сил на плечо.
Д ве
пары сил
эквивалентны
в том случае, если после замены одной
пары сил другой, механическое состояние
тела не изменится. При этом, изменив
величину силы и плеча новой пары
необходимо сохранить равенство их
моментов. (рис 4). М1
эквивалентна
М2 .
ве
пары сил
эквивалентны
в том случае, если после замены одной
пары сил другой, механическое состояние
тела не изменится. При этом, изменив
величину силы и плеча новой пары
необходимо сохранить равенство их
моментов. (рис 4). М1
эквивалентна
М2 .

В случае когда в системе пар сил момент результирующей пары равен нулю то можно считать что система находится в равновесии.
Момент силы относительно точки равен произведению модуля силы на длину перпендикуляра, опущенного из этой точки на прямую действия силы (рис.4).
МА=Р*h
Лемма Пуассо
Действие силы на твердое тело не изменится, если эту силу перенести параллельно своему первоначальному направлению в любую точку , и приложить при этом пару сил с моментом равным произведению силы на расстояние от точки приведения до первоначального положения исходной силы. (рис 6) М= Р*ОК
Б43: Реакции связи и методы их определения.
Статика Понятия и определения
Статика – наука, изучающая равновесие системы сил, действующих на тело.
Различают нагрузки:
Сосредоточенные (когда площадь действия нагрузки стремится к нулю) [Н];
Распределенные (нагрузка может быть распределена: а) по длине [Н/м], б) по площади [Н/м2], в) по объему [Н/м3];
Статические нагрузки, плавно изменяющиеся от нуля до определенной величины;
Динамические (нагрузки, связанные с действием ускорения, могут быть повторно-переменными);
Ударные (нагрузки, с высокими значениями ускорений ).
Аксиомы статики
1. Свободное и абсолютно твердое тело находится в равновесии под действием двух сил тогда, и только тогда, когда действующие на него силы противоположно направлены, действуют по одной прямой и имеют равные модули.
2. Действие данной системы сил на данное тело не изменится, если к нему присоединить (или отнять) систему сил, равнодействующая которой равна нулю.
3. Две силы, приложенные к точке, эквивалентны равнодействующей силе, приложенной к этой точке, определяемой по правилу параллелограмма.
4. Равновесие тела сохранится, если наложенные на него связи заменить реакциями связи.
Связи – материальные тела, ограничивающие перемещение тела. Сила, с которой связь действует на тело, называется реакцией связи.
Связи и реакции связи
В
пространстве возможно шесть перемещений
(рис. 1)
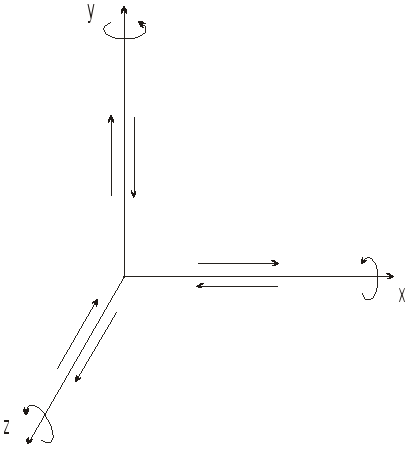 ,
а на плоскости – три (рис.2)
,
а на плоскости – три (рис.2)
 .
.
Реакции связи всегда противоположны тому направлению, по которому связь препятствует движению.
Реакция связи – сила, с которой связь препятствует перемещению.
Примеры реакции связи:
Обозначения:
G – внешняя нагрузка,
N – нормальная составляющая реакции R,
T – касательная составляющая реакции R,
V – вертикальная составляющая реакции R,
H – горизонтальная составляющая реакции R.
Пример
поверхности без трения (рис.1)
 .
Реакция связи направлена по нормали к
опорной поверхности.
.
Реакция связи направлена по нормали к
опорной поверхности.
Поверхность с трением (рис.2)
.Полная
реакция связи равна геометрической
сумме нормальной и касательной
составляющих этой реа![]()
Реакция,
действующая вдоль гибкой связи (рис.3)
 ,
работает на растяжение.
,
работает на растяжение.
![]()
Реакция
неподвижного цилиндрического шарнира
(рис.4, точка А)
 лежит
в плоскости перпендикулярной его оси,
имеет радиальное направление и
определяется как:
лежит
в плоскости перпендикулярной его оси,
имеет радиальное направление и
определяется как:
![]()
У
шарнирно подвижной опоры (рис.4, точка
В) горизонтальной составляющей
реакции опоры не будет, т.к. горизонтальная
сила компенсируется перемещением
вдоль горизонтальной поверхности.
 Консольная
опора (жесткая заделка).
Консольная
опора (жесткая заделка).
В общем случае будет вертикальная VA, горизонтальная НА составляющие реакции RA и реактивный момент МА.
Б46: Основы кинетостатики. Принцип Даламбера.
Основы кинетостатики
Принцип
Даламбера![]()
Пусть
материальная точка М совершает движение
с ускорением. На эту точку действует
сила
![]() и
равнодействующая сил реакции связи R.
Добавим силу инерции точки М - Ф.
и
равнодействующая сил реакции связи R.
Добавим силу инерции точки М - Ф.
F=![]() .
.
Для данной системы запишем условие равновесия, с учетом силы инерции.
![]()
Тогда сила инерции определится как:
![]()
Принцип: Если к действующим на точку активным силам и реакциям добавить силу инерции, то в каждый момент времени полученная система сил будет уравновешена.
Принцип Даламбера представляет собой формальный математический прием, удобный для решения задач динамики. Этот прием позволяет записывать динамические уравнения движения в форме уравнений равновесия.
Особенности:
При криволинейном движении:
![]() Для
системы внешних и внутренних сил, принцип
Даламбера может быть представлен в
следующем виде:
Для
системы внешних и внутренних сил, принцип
Даламбера может быть представлен в
следующем виде:
![]() (1)
(1)
где
![]() - сумма внешних сил,
- сумма внешних сил,
![]() - сумма внутренних сил,
- сумма внутренних сил,
![]() - сумма сил инерции.
- сумма сил инерции.
Принцип Даламбера может быть записан и для моментов сил:
![]() .
(2)
.
(2)
В механике макрообъектов внутренние силы считаются уравновешенными, и с учетом этого можем считать:
![]()
Можно принять, что силы и моменты инерции, представляются главным вектором и главным моментом сил инерции:
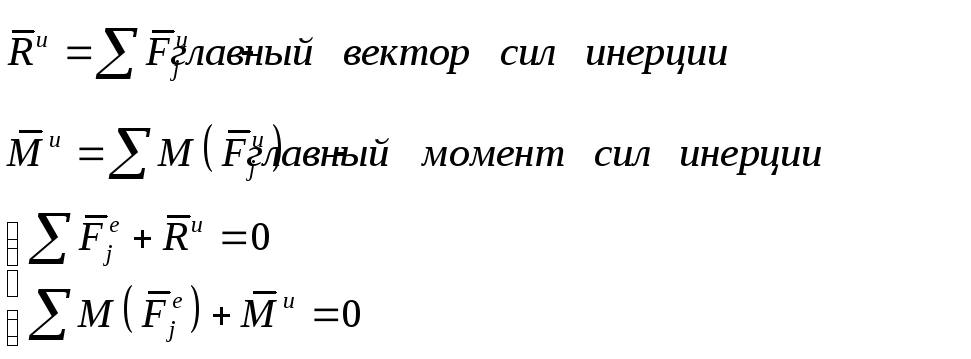
В проекциях на оси координат получают уравнения, аналогичные уравнениям статики:
Для пространственной системы:

Для плоской системы:

Расчеты при динамических нагрузках.
Если известны действующие силы и силы инерции, возможно использование метода сечений и уравнения равновесия.
Силы инерции вызывают в элементах конструкции дополнительные нагрузки и соответствующие напряжения. Для простоты эти напряжения можно считать статическими, но вызванными силами инерции.
Для решения задач прочности связанными с динамическими нагрузками:
1. Определение ускорения точек;
2. Определение сил инерции;
3. Элемент (конструкция) нагружается силами инерции и внешними силами;
4. Расчеты ведутся по аналогии с расчетом статических систем.
Пример: Требуется определить напряжение в тросе на расстоянии z от его конца. (Рис. 1).
уравнение равновесия
Определение
массы поднимаемой системы
Определение силы
инерции
Определяем
усилия, действующие на тросс![]()

 Допускаемое
напряжение с учетом зависимости (1) может
быть представлено в следующем виде:
Допускаемое
напряжение с учетом зависимости (1) может
быть представлено в следующем виде:
![]()
![]()
Б47: Червячные передачи. Усилия в зацеплении. Основы расчета на прочность.
Червячные передачи.
Червячная передача относится к числу так называемых зубчато-винтовых, т. е. имеющих признаки, характерные и для зубчатых, и для винтовых передач.
Основные достоинства червячной передачи, обусловившие ее широкое распространение в различных отраслях машиностроения:
1. Плавность и бесшумность работы;
2. Возможность получения больших передаточных чисел при сравнительно небольших габаритах передачи. Червячные передачи применяются с передаточными числами от u = 5 до u = 500. Диапазон передаточных чисел, применяемых в силовых передачах, u = 10-80 (в редких случаях до 120).
3. Компактность.
Недостатки червячной передачи:
1.
Сравнительно невысокий к. п. д.![]()
2. Сильный нагрев передачи вследствие перехода потерь на трение в тепловую энергию. Для уменьшения нагрева в червячной передаче применяют масляные резервуары с ребристыми стенками с целью более интенсивной теплоотдачи в окружающий воздух, обдув корпуса и другие способы охлаждения.
3. Небольшие передаваемые мощности.
Червячные передачи различают по числу заходов червяка — одно-, двух-, трех- и многозаходные; по расположению вала червяка — относительно червячного колеса с верхним, нижним и боковым расположениями.
Усилия, действующие в зацеплении
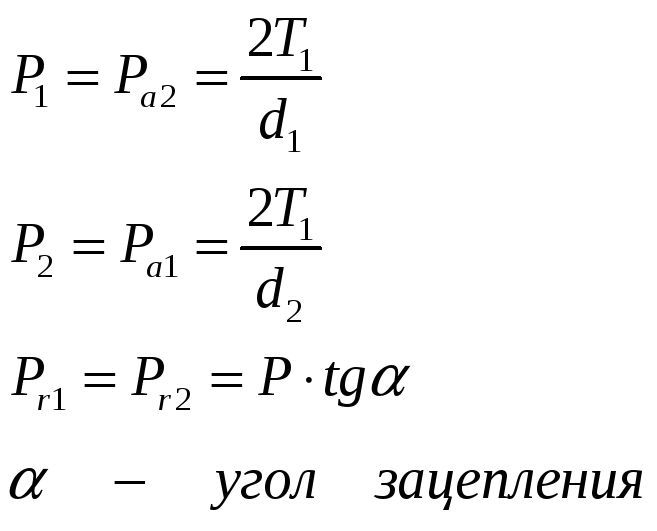
d1,d2 – делительные диаметры червяка и колеса соответственно.
Особенности расчета червячных передач
Проектный расчет на контактную прочность строится на основе определения межосевого расстояния
![]()
Проверочный расчет на изгиб
1,2 – коэффициент упрочнения зуба за счет его длины и дугообразности.
![]()
у – коэффициент формы зуба.
Б48: Кинематический анализ рычажных механизмов.
Рычажные механизмы
Кинематический анализ рычажных механизмов предусматривает определение положения звеньев и построение траектории движения отдельных точек механизма. Определение линейных скоростей точек и угловых скоростей звеньев механизма, ускорений точек и угловых ускорений звеньев механизма.
1. Определение положения звеньев.
![]()
![]()
 Рис.
1
Рис.
1
Используя начальные условия определяем положение точки С

2. Определение скоростей.
Дифференцируя
любой угол по
![]() ,
получаем безразмерную скорость /или ее
аналог/. Связь между действительной
угловой скоростью и ее аналогом можно
записать в следующем виде:
,
получаем безразмерную скорость /или ее
аналог/. Связь между действительной
угловой скоростью и ее аналогом можно
записать в следующем виде:
![]() Аналогично
и для линейной скорости:
Аналогично
и для линейной скорости:
![]()
Дифференцируя
по
![]() систему (1) и умножая на угловую скорость
1 звена, получим систему 2:
систему (1) и умножая на угловую скорость
1 звена, получим систему 2:
 Первое
уравнение из системы (2) определяет
линейную скорость точки С, а из второго
уравнения можно определить угловую
скорость второго звена:
Первое
уравнение из системы (2) определяет
линейную скорость точки С, а из второго
уравнения можно определить угловую
скорость второго звена:
![]()
Вводя аналог ускорения аналогичным образом определяется ускорение точки С и угловое ускорение второго звена:
 В
системе 2 переменными являются не только
φ2,
но и w2
В
системе 2 переменными являются не только
φ2,
но и w2
![]() Из
второго уравнения третьей системы можно
найти угловое уравнение третьего звена
Из
второго уравнения третьей системы можно
найти угловое уравнение третьего звена
![]() .
.
Б50: Главный вектор и главный момент. Приведение системы сил к простейшему виду.
Главный
вектор и главный момент
Пусть к телу в точке А, В и С приложена плоская система сил (Р1,Р2,Р3) (Рис 7) при параллельном переносе этих сил в точку О получается новая плоская система сил (Р1’,Р2’,Р3’) а также система пар сил Р1 Р’’1 ; Р2 Р’’2 ; Р3 Р’’3 ; эти пары сил можно определить в следующих зависимостях М (Р1)= Р1*а, М (Р2)= Р2*b, М (Р3)= Р3*c.
Главный вектор новой системы сил равен геометрической сумме векторов системы приведенных с к точке 0.
![]() Главный
момент системы относительно заданной
точки О, равен сумме моментов сил,
относительно той же точки.
Главный
момент системы относительно заданной
точки О, равен сумме моментов сил,
относительно той же точки.
![]()
Произвольная
плоская система сил (Р1,Р2,Р3) эквивалентна
силе приложенной в точке О и равна
главному вектору
![]() ,
а так же паре сил с моментом
,
а так же паре сил с моментом
![]() (главный
момент системы).
(главный
момент системы).
Приведение плоской системы к простому виду.
1. Выбрать систему координат
2. Выбрать центр приведения
3. Вычислить проекции главного вектора на координатные оси (Vx ,Vy)
![]()
4. Вычислить модуль главного вектора
5. Вычислить главный момент.
Возможны следующие виды при приведении к простому виду
1. V и М0 не равны 0, в этом случае равнодействующая равнаV который отстоит от равнодействующей на величину h где h= М0 /V
2. V не равна 0, М0 равна 0 система приводится к равнодействующей при этом R=V и совпадает с линией вектора
3. V равна 0, М0 не равна 0 – система приводится к паре сил с иоиентом равному главному моменту
4. V =М0 = 0 – в этом случае система находится в равновесии для уравнения равновесия сил произвольно расположенных на плоскости V и М0 должны быть равны 0, в связи с этим реализуется несколько форм равновесия
а) б)
б)
