

Кинематический анализ.
Механизмы для передачи вращательного движения.
К простым механизмам передачи вращательного движения относятся зубчатые, цепные, ременные и фрикционные передачи.
Основным
кинематическим параметром любого
колесного механизма является передаточное
отношение.

![]()
Если u>1, то реализуется редуцированное вращение (характерно для редукторов – устройств, понижающих вращение на выходе).
В случае если u<1 механизм называется мультипликатором.
Передаточные отношения могут быть выражены через конструктивные параметры:
1.
радиусы (диаметры) колес;
 2.
количество зубьев (для зубчатых цепных
передач).
2.
количество зубьев (для зубчатых цепных
передач).
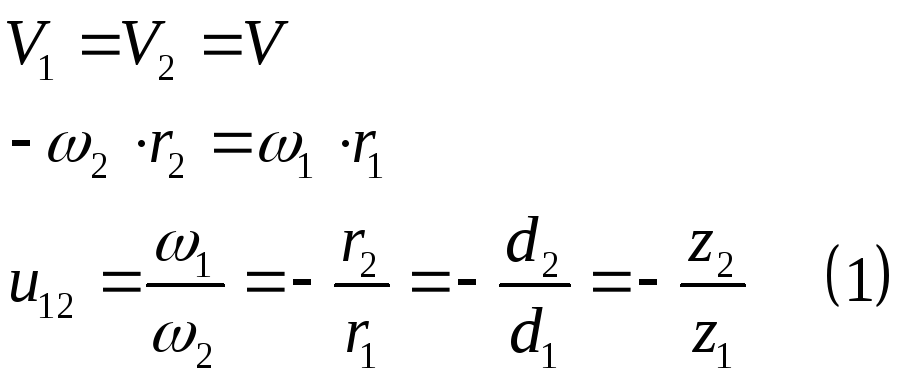
Линейная скорость первого колеса:
![]()
Второго:
![]()
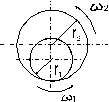
Минус показывает, что направления угловых скоростей противоположны.
В ыражение
(1) характерно для внешнего зацепления.
Для внутреннего зацепления направления
угловых скоростей совпадают.
ыражение
(1) характерно для внешнего зацепления.
Для внутреннего зацепления направления
угловых скоростей совпадают.
![]() .
.
При работе фрикционных и ременных передач может происходить проскальзывание, которое следующим образом учитывается при определении передаточного отношения.
![]()
![]()
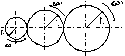
Механизмы с последовательным соединением колес
![]() (1)
(см. рис. 3)
(1)
(см. рис. 3)
Обобщая это выражение для n числа колес, и для k пар колес внешнего зацепления, а также выражая это соотношение через геометрические параметры можно записать
![]()
Промежуточные колеса не влияют на величину передаточного отношения. Промежуточные колеса служат для изменения направления.
Механизмы со ступенчатым соединением колес.
Двухступенчатая
передача (рис. 1)

рис.1
![]()
Обобщая для n колес и k пар получим:
![]()
Ступенчатое соединение колес может реализовать большое передаточное отношение.
В случае соединения колесных механизмов, например, цилиндрической одноступенчатой зубчатой передачи и ременной передачи: (рис. 2)
![]() ε-коэффициент
проскальзывания.
ε-коэффициент
проскальзывания.
![]()
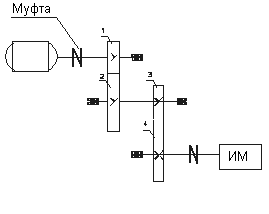
рис.2
Б41: Уравнение равновесия плоской системы сходящихся сил.
Уравнение равновесия плоской системы сходящихся сил
Теорема о трех уравновешивающих силах
Если три непараллельные силы лежат в одной плоскости и взаимно уравновешиваются, то линии их действия пересекаются в одной точке.
 Доказательство:
Доказательство:
Силы Р1 и Р2 пересекаются в точке О, их можно перенести в нее по линиям их действия. Из аксиомы 3 получаем суммарное значение действия этих сил Р∑. Так как система равновесная, то, согласно, аксиоме 1, Р∑ и Р3, должны лежать на одной прямой, быть направленными в разные стороны и уравновешиваться. Следовательно, прямая действия силы Р3 также проходит через точку О.
Проекция силы на ось координат равна произведению модуля силы на косинус угла между вектором этой силы и положительным направлением координатной оси.

![]() Проекции
суммы векторов
Проекции
суммы векторов
Проекция вектора суммы сил на ось равна сумме проекций слагаемых на ту же ось и равна, проекции равнодействующей данной системы сил.

![]()
А
модуль равнодействующей будет находиться
по выражению
![]() .
Если равнодействующая
.
Если равнодействующая
равна нулю, то сумма сходящихся сил тоже равна нулю. А это может быть только в том случае, когда
Эти два уравнения представляют собой систему уравнений равновесия сходящихся сил на плоскости.
Таким образом, равнодействующая плоской системы сил равна нулю только в том случае, когда сумма проекций ее слагаемых на каждую из координатных осей равна нулю.
Рассмотрим силовой треугольник:
Согласно аксиоме 3 равнодействующая двух сил определяется с использованием правила параллелограмма (рис.1) или правила треугольника (рис.2)
Силовой многоугольник – последовательное применение силовых треугольников. Когда силовой треугольник (многоугольник) замкнут (рис.3), тогда система находится в равновесии.
Б42: Уравнение равновесия системы сил, произвольно расположенных на плоскости.