

3.3. Типовые динамические звенья и их передаточные функции
Согласно теореме Виета полином n-го порядка может быть представлен в виде произведения двучленов, а поэтому передаточная функция системы примет вид:

= kWЭ1(p) WЭ2(p) ... WЭK(p), (3.29)
где qi - корни полинома числителя W(p), называемые ее нулями, ri - корни полинома знаменателя W(p), называемые ее полюсами (напомним, что полюса передаточной функции системы есть корни характеристического уравнения этой же системы); k=b0/a0.
Выражение (3.29) показывает, что любую систему можно представить в виде соединения элементарных звеньев, которые принято называть типовыми динамическими звеньями. Каждое типовое динамическое звено имеет один вход, один выход, обладает свойством однонаправленности передачи входного воздействия и имеет порядок не выше второго.
Передаточные функции типовых динамических звеньев.
а) Безынерционное усилительное звено
x(t) = k f(t); X(p) = k F(p); W(p) = X(p)/F(p) = к . (3.30)
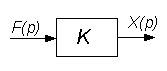
Рис.3.2. Структурная схема усилительного звена:
б) Интегрирующее звено
![]() kи
f(t); x(t) = kи
kи
f(t); x(t) = kи![]() ;
;
X(p) = (kи/p) F(p); W(p) = X(p)/F(p) = kи/p или, если принять, что 1/ки=Ти - постоянная времени интегрирующего звена, то
W(з)=1/Тир (3.31)
Характеристическое уравнение p = 0, т.е. p1= 0.
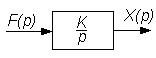
Рис.3.3. Структурная схема интегрирующего звена:
В) Идеальное дифференцирующее звено
x(t)
= kд![]() ;
;
X(p) = kд p F(p);
W(p) = X(p)/F(p) = kд p=Тдр, (3.32)
где кд=Тд – постоянная времени дифференцирующего звена.
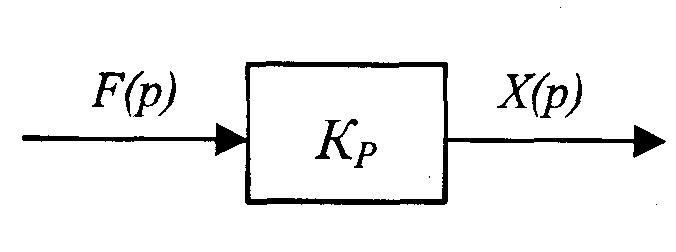
Рис.3.4. Структурная схема идеального дифференцирующего звена
г) Апериодическое звено (инерционное звено первого порядка)
T
![]() + x(t) = 1
f(t);
+ x(t) = 1
f(t);
(T p + 1) X(p) = 1 F(p);
W(p) = X(p)/F(p) = 1/(T p + 1). (3.33)
Характеристическое уравнение: T p + 1 = 0;
p1= -1/T, где Т – постоянная времени апериодического звена.
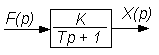
Рис.3.5. Структурная схема апериодического звена
д) Форсирующее звено
![]()
![]()
![]() , (3.34)
, (3.34)
где Тф – постоянная времени форсирующего звена.
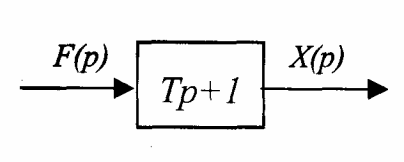
Рис.3.6. Структурная схема форсирующего звена
е) Динамическое звено второго порядка
![]()
![]() +
2T0
+
2T0
![]() + x(t) = 1
f(t);
+ x(t) = 1
f(t);
(![]()
p2+2T0
p + 1)
X(p) = 1
F(p);
p2+2T0
p + 1)
X(p) = 1
F(p);
W(p)
= X(p)/F(p) = 1/(![]()
p2+2T0
p + 1).
(3.35)
p2+2T0
p + 1).
(3.35)
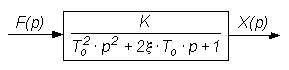
Рис.3.7. Структурная схема звена
Характеристическое уравнение
![]()
p2+2T0
p + 1= 0;
p2+2T0
p + 1= 0;
p1,2
=
![]() , (3.36)
, (3.36)
т.е. значения и характер корней характеристического уравнения зависят от величины коэффициента относительного затухания .
При >1 корни характеристического уравнения (см. (3.36)) являются вещественными, и поэтому передаточную функцию рассматриваемого звена можно представить в следующем виде:
![]() , (3.37)
, (3.37)
где ![]() . (3.38)
. (3.38)
В этом случае звено второго порядка эквивалентно по своим динамическим свойствам последовательному соединению двух инерционных звеньев первого порядка и называется инерционным звеном второго порядка.
При 0< < 1 корни характеристического уравнения
p1,2 = - j,
где ![]() , (3.39)
, (3.39)
т.е. корни комплексно-сопряженные, а звено называется колебательным.
При = 0 передаточная функция колебательного звена примет вид
W(p)
= 1/(![]()
p2
+ 1).
(3.40)
p2
+ 1).
(3.40)
Корни характеристического уравнения
![]()
p2+1=
0;
p2+1=
0;
p1,2
=
![]() , (3.41)
, (3.41)
являются мнимыми сопряженными, а звено называется консервативным.
Рассмотренные передаточные функции и корни характеристических уравнений показывают, что звено второго порядка может обладать разными динамическими свойствами.