

(-60 Дб/дек) рис. 5.3.А - –20, -20, -60 дб/дек; рис.5.3.Б - -40, -20, -60 дб/дек
Наклон высокочастотного участка во многом определяется передаточной функцией исходной нескорректированной системы и возможностью реализации корректирующего устройства.
Форма и параметры желаемой ЛАЧХ и ЛФЧХ определяются техническими требованиями к системе регулирования tппж, x, f, , S3, Sf.
1) Частота среза желаемой ЛАЧХ срж=(24)/tппж;
2) Наклон среднечастотного участка –20 Дб/дек;
3) Протяженность среднечастотного участка 1 дек;
4) Наклон низкочастотного участка составляет:
а) для статических систем 0 Дб/дек;
б) для астатических систем первого порядка средней точности –20 Дб/дек;
в) для астатических систем второго порядка высокой точности –40 Дб/дек.
5) Наклон высокочастотного участка определяется наличием динамических звеньев с малыми постоянными времени в исходной неизменяемой части системы
редко –40 Дб/дек.
обычно -60 Дб/дек;
или –80 Дб/дек;
Исходя из сформулированных правил выбора желаемой ЛАЧХ и ЛФЧХ, можно записать три передаточные функции разомкнутого контура, соответствующие трем вариантам желаемых ЛАЧХ:
1 – (0; -20; -60) Дб/дек ;
2 – (-20; -20; -60) Дб/дек;
3 – (-40; -20; -60) Дб/дек.
![]() , (5.14)
, (5.14)
где
![]() - частота среза желаемой ЛАЧХ
- частота среза желаемой ЛАЧХ
![]()
![]() , (5.15)
, (5.15)
где
![]() – частота
среза желаемой ЛАЧХ.
– частота
среза желаемой ЛАЧХ.
(5.16)![]()
где
![]() – частота среза желаемой ЛАЧХ;
– частота среза желаемой ЛАЧХ;
![]() -
малая постоянная времени.
-
малая постоянная времени.
![]() -
постоянная времени форсирующего звена.
-
постоянная времени форсирующего звена.
Зная передаточную функцию исходной нескорректированной системы и желаемую передаточную функцию системы, обладающей требуемыми показателями, можно вычислить передаточную функцию корректирующего устройства W(р)ку, используя следующее соотношение W(р)ж=W(р)куW(р)исх ,
т
(5.17)![]()
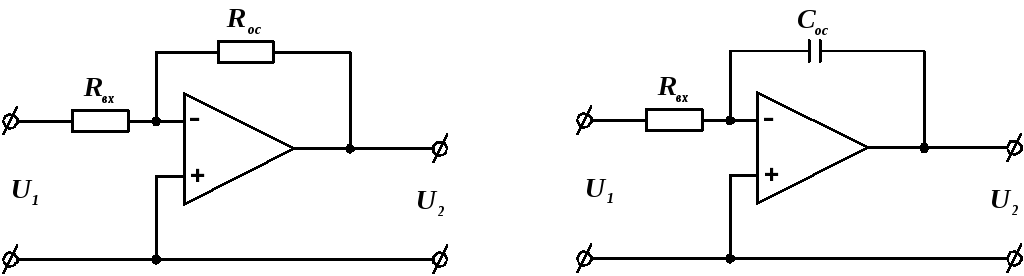
Техническая реализация корректирующего устройства с конкретной передаточной функцией выполняется путем последовательного включения типовых динамических звеньев, построенных на пассивных R, С элементах или на операционных усилителях постоянного тока (ОУ), охваченных R-С обратными связями и имеющих R-С-элементы во входных цепях. Передаточная функция такого усилителя определяется соотношением
(5.18)![]()
где Zос(р) и Zвх(р) операторные сопротивления цепи обратной связи и входной цепи с учетом того, что Z(р)R= R, Z(р)С= 1/Ср, Z(р)L= Lр.
Примеры типовых схем корректирующих звеньев, реализованных на ОУ, приведены на рис. 5.4 – 5.10.
На рис. 5.4 приведена схема усилительного звена с передаточной функцией
(5.19)![]()
На рис. 5.5 приведена схема интегрирующего звена с передаточной функцией
(5.20)![]()
где Ти=СосRвх – постоянная времени интегрирования.
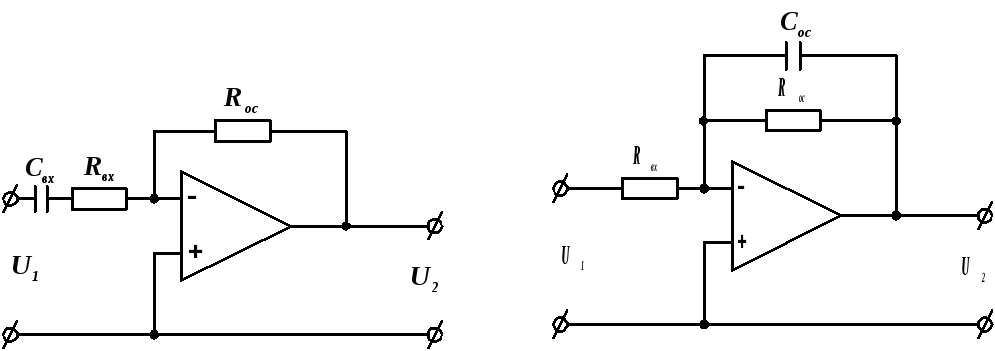
На рис. 5.6 приведена схема дифференциально-инерционного звена с передаточной функцией
![]() ,
,
где Тд=СвхRос – постоянная времени дифференцирования,
Та= СвхRвх – постоянная времени инерционного звена.
Обычно выбирают ТдТа, т.е. RвхRос. В этом случае по своим динамическим свойствам звено приближается к идеальному дифференцирующему. Желательно, чтобы Та 0,01Тд, что достигается, когда резисторы Rвх и Rос отличаются в 100 раз.
На рис. 5.7 приведена схема инерционного звена с передаточной функцией
(5.21)![]()
где К=Rос/Rвх – коэффициент усиления,
Т=СосRос – постоянная времени.
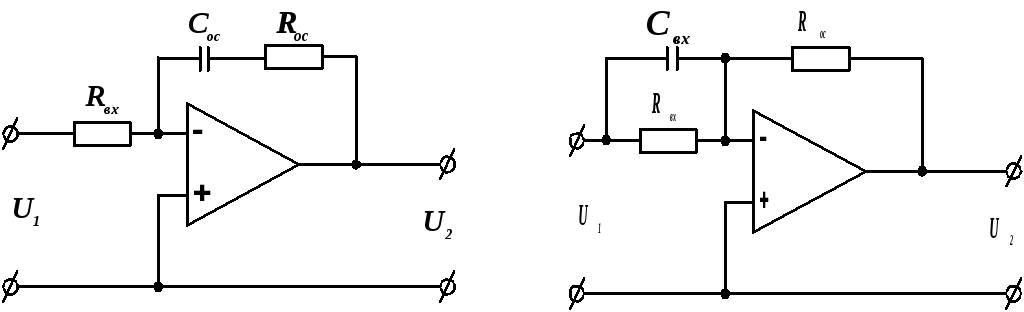
На рис. 5.8. приведена схема форсирующего звена с передаточной функцией
|
Рис. 5.4 Усилительное звено |
Рис. 5.5 Интегрирующее звено |
|
Рис. 5.6 Дифференциально-инерционное звено (реальное дифференцирующее) |
Рис. 5.7 Инерционное звено |
|
Рис.5.8 Интегрально-форсирующее звено (ПИ-звено) |
Рис. 5.9 Форсирующее звено |
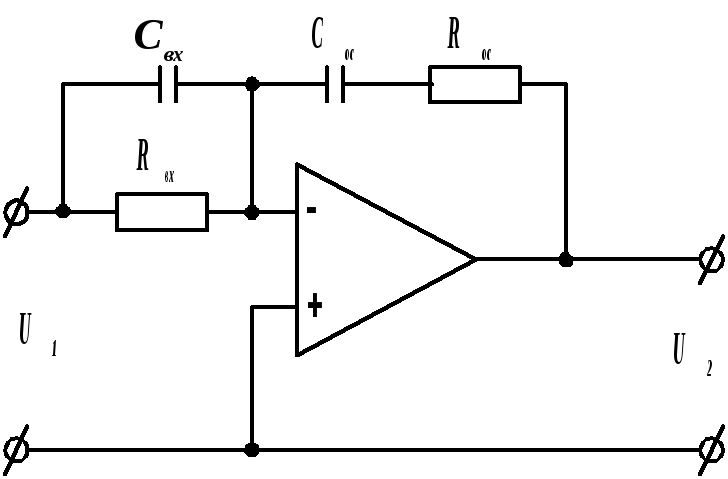
Рис. 5.10 Интегрально-дважды форсирующее звено (ПИД-звено)
(5.22)![]()
где К=Rос/Rвх – коэффициент усиления
Тф=Сос Rос – постоянная времени форсирования.
На рис. 5.9 приведена схема интегрально-форсирующего звена с передаточной функцией
(5.23)![]()
где Тф=Сос Rос – постоянная времени форсирования,
Ти=Сос Rвх – постоянная времени интегрирования.
Часто это звено называют пропорционально-интегральным (ПИ-регулятором), так как после почленного деления числителя на знаменатель можно записать
![]() ,
(5.24)
,
(5.24)
г
![]()
![]() - коэффициент усиления пропорционального
слагаемого.
- коэффициент усиления пропорционального
слагаемого.
На рис. 5.10 приведена схема интегрально - дважды форсирующего звена с передаточной функцией
(5.25)![]()
где Тф1=Сос Rос – первая постоянная времени форсирования,
Тф2=Свх Rос – вторая постоянная времени форсирования,
Ти=Сос Rвх – постоянная времени интегрирования.
Часто это звено называют пропорционально - интегрально- дифференциальным (ПИД - регулятором), так как после перемножения двухчленов в числителе и почленного деления числителя на знаменатель получается
(5.26)
где
![]() - коэффициент усиления,
- коэффициент усиления,
![]() - постоянная времени дифференцирования.
- постоянная времени дифференцирования.