

5. Синтез замкнутых систем регулирования
Обычно под синтезом замкнутой системы регулирования подразумевается расчет и включение в контур регулирования дополнительных динамических звеньев, корректирующих устройств, с целью достижения требуемых показателей качества в установившемся и переходном режимах, которые задаются в технических требованиях.
На практике наибольшее распространение получил частотный метод синтеза корректирующих устройств с использованием логарифмических амплитудных (ЛАЧХ) и логарифмических фазовых (ЛФЧХ) частотных характеристик разомкнутой системы регулирования.
5.1. Содержание технических требований
В качестве исходных данных для синтеза принимаются технические требования к точности системы регулирования в установившихся режимах работы и динамические показатели переходного процесса отработки ступенчатого задающего воздействия.
Технические требования к системе регулирования обычно составляются на основании параметров технологического процесса, в реализации которого используются система регулирования.
Точность системы регулирования в установившемся режиме при отработке воздействия fз называют статизмом по воздействию fз.
Статизм определяется соотношением
(5.1)![]()
где Yз – заданное значение выходной координаты;
Yх – выходная координата после отработки воздействия fз.
Если статизм равен нулю, т.е. Sfз=0, то система называется астатической по входу fз .
На рисунке 5.1. приведен график переходного процесса отработки системой регулирования ступенчатого воздействия fз.
К динамическим показателям переходного процесса отработки ступенчатого воздействия относятся:
Время переходного процесса tпп, с,
Перерегулирование %,
Число колебаний регулируемой координаты nк,
Время нарастания до заданного значения tнр, с.
Время переходного процесса tпп – момент вхождения выходной координаты Х в зону допустимых отклонений, после которого она уже не выходит из этой зоны.
Перерегулирование выходной координаты % вычисляется из соотношения
(5.2)![]()
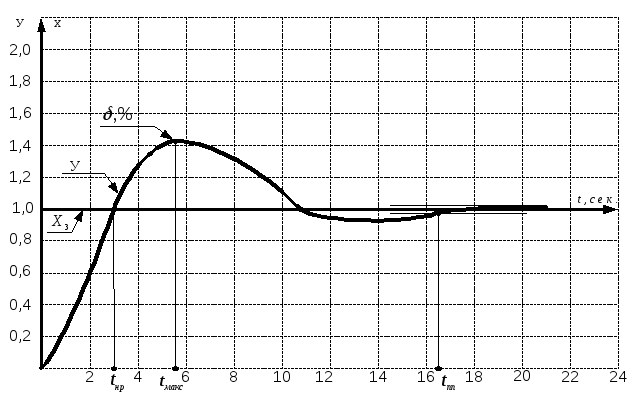
Рис.5.1 График переходного процесса отработки системой регулирования
Ступенчатого воздействия fз
Число колебаний nк равно числу переходов выходной координаты через уровень заданного значения до попадания в зону допустимых отклонений.
Время нарастания tнр – момент первого достижения регулируемой координатой уровня заданного значения.
5.2. Общий порядок синтеза корректирующего устройства и вид желаемой лачх
На основании технических требований по точности, времени переходного процесса tпп и допустимому перерегулированию выбирается вид желаемой ЛАЧХ и ЛФЧХ разомкнутой скорректированной системы. В теории регулирования было выявлено, что существует определенная взаимосвязь между ЛАЧХ и ЛФЧХ разомкнутой системы и точностью, временем переходного процесса tпп и перерегулированием в замкнутом контуре регулирования.
Типовые желаемые ЛАЧХ и ЛФЧХ разомкнутых скорректированных систем приведены на рисунке 5.2 а, б, в. Они имеют асимптоты с наклоном –0, -20, -40 ДБ/дек (рис. 5.2.а); -20, -20, -40 ДБ/дек (рис.5.2.б); -40, -20, -40 ДБ/дек (рис.5.2.в). При этом первым указывается наклон низкочастотной асимптоты.
Разомкнутый контур с ЛАЧХ вида 0; -20; -40 Дб/дек имеет передаточную функцию
(5.3)![]()
и содержит три звена: одно усилительное и два апериодических.
На рис. 5.2.а ЛФЧХ определяется соотношением
()= - arctg T1 - arctg T2
Разомкнутый контур с ЛАЧХ вида –20; -20; -40 Дб/дек имеет передаточную функцию
(5.4)![]()
и содержит три звена: одно усилительное с К=1/Ти, одно интегрирующее и одно апериодическое звенья.
На рис. 5.2.б ЛФЧХ определяется соотношением
()= -90 - arctg T2
Разомкнутый контур с ЛАЧХ вида –40; -20; -40 Дб/дек содержит два интегрирующих звена и имеет передаточную функцию
(5.5)![]()
и содержит пять звеньев: одно усилительное с К=1/Т2и, два интегрирующих, одно форсирующее и одно апериодическое звенья.
На рисунке 5.2.в ЛФЧХ определяется соотношением
()= -290 + arctg T1 - arctg T2
На каждой ЛАЧХ рис. 5.2 можно выделить три участка:
- низкочастотный;
- среднечастотный;
- высокочастотный.
Динамические показатели замкнутой системы регулирования определяются среднечастотным участком ЛАЧХ, который располагается слева и справа относительно частоты среза ср, где ЛАЧХ пересекает ось частот.
Чтобы система была устойчивой и имела качественный переходный процесс в отношении перерегулирования и числа колебаний nк, среднечастотный участок ЛАЧХ должен иметь наклон –20 Дб/дек, а его протяженность составлять не менее одной декады. Время переходного процесса tпп и частота среза ср связаны следующим соотношением:
(5.6)![]()
Перерегулирование в переходном процессе замкнутой системы регулирования и число колебаний зависит от запаса по фазе на частоте среза
(5.7)
где ср – сдвиг по фазе сигнала в разомкнутом контуре регулирования на частоте среза.
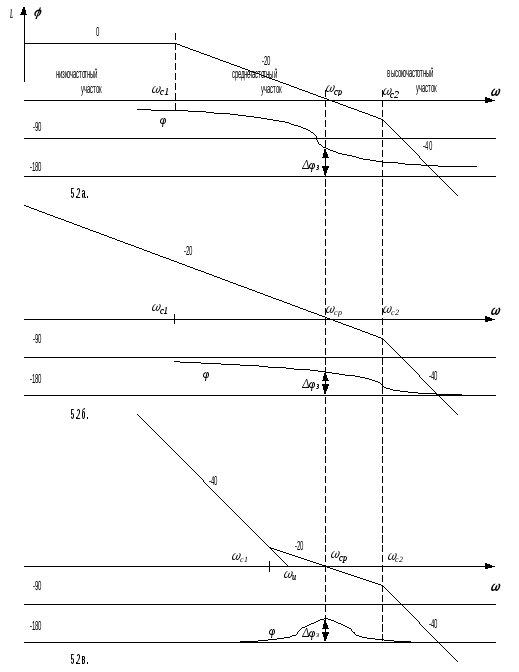
Рис. 5.2 ЛАЧХ и ЛФЧХ разомкнутых скорректированных систем регулирования