

Определение параметров желаемой передаточной функции.
Исходя из требуемого порядка астатизма системы приходим к выводу, что разомкнутый контур регулирования должен иметь ЛАЧХ типа –20; -20; -60 ДБ/дек.
Такой ЛАЧХ соответствует передаточная функция
(5.34)![]()
где
![]() - эквивалентная малая постоянная времени,
определяющая наклон высокочастотного
участка ЛАЧХ скорректированной системы.
Желаемые ЛАЧХ и ЛФЧХ приведены на рис.
5.14.
- эквивалентная малая постоянная времени,
определяющая наклон высокочастотного
участка ЛАЧХ скорректированной системы.
Желаемые ЛАЧХ и ЛФЧХ приведены на рис.
5.14.
Для этой системы передаточные функции по ошибке от задающего воздействия Uз и возмущения Мс имеют следующий вид
(5.35)![]()
(5.36)![]()
 ,
,
 .
.
Следовательно, условие астатизма по задающему воздействию Uз и возмущению Мс в желаемой структуре выполняется. Частота среза желаемой ЛАЧХ определяется из соотношения
![]()
![]() 1/с.
1/с.
Постоянная времени интегрирования желаемой передаточной функции
Ти=1/ср ж=1/66,5=0,015 с.
Частота сопряжения среднечастотного и высокочастотного участков С должна быть в 2,5-3 раза выше частоты среза ср ж, т.е. е=2,566,5=167 1/с.
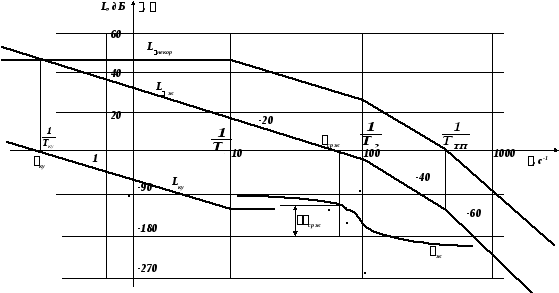
Рис. 5.14 Частотные характеристики системы электропривода
Постоянная времени Те=1/е=1/167=0,006 с.
Из данных неизменяемой части системы
![]()
![]() с.
с.
Таким
образом: ![]()
Определение передаточной функции корректирующего устройства
П
(5.37)![]()
Следовательно, корректирующее устройство должно иметь передаточную функцию
(5.38)![]()
где ТТП=410-3 с, Т1=8,310-2; Т2=1,210-2 сек,
КУ=1300,50,1=1,5.
Можно приближенно считать, что
(ТТПр+1)(Т2р+1)(Тер+1)2
Так как 0,4810-4 р2+1,4610-2 р+1 0,3610-4 р2+1,210-2 р+1.
Поэтому упрощенная передаточная функция корректирующего устройства
![]() ,
,
где Ти ку=КуТи=1,50,015=0,0225 сек.
Передаточная функция системы регулирования с желаемой упрощенной передаточной функцией по задающему сигналу
![]() .
.
При такой передаточной функции время переходного процесса отработки ступенчатого задающего воздействия tпп (67)Ти 7110-20,1 сек.
Полученное время tпп в 1,5 раза меньше, чем в технических требованиях
![]() .
.
Следовательно, с целью уменьшения перерегулирования в переходном процессе целесообразно уменьшить значение ср ж, и считать, что расчетное значение ср расч=66,5/1,550 1/сек.
Этой частоте среза соответствует постоянная времени интегрирования Ти=0,02 сек.
Расчетные передаточные функции скорректированной системы регулирования
(5.39)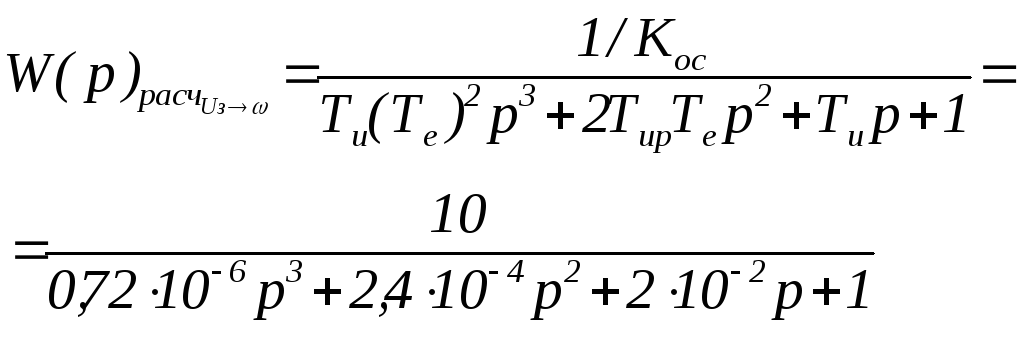
(5.40)
![]()
где Км = Ти ку / Кя См КТП - коэффициент передачи по моменту Мс.
Для оценки величины перерегулирования следует вычислить запас по фазе на частоте среза разомкнутого контура с расчетными параметрами
=180 – 90 – 2 arctgср Te = 90 - 2arctg506010-3 = 90 – 33 = 57.
Следовательно, перерегулирование в переходном процессе не будет превышать требуемого значения 15%.
Техническая реализация корректирующего устройства
Корректирующее звено представляет собой интегро-форсирующее звено (ПИ - звено). Поэтому его целесообразно выполнить в виде активного динамического звена на базе ОУ по схеме рис. 5.13.
Его передаточная функция имеет следующий вид
![]() ,
,
где Т1=СосRос, Ти=Сос Rвх,
расчетные значения Т1=0,083с;
![]()
Выбрав стандартное значение емкости Сос, можно рассчитать требуемые величины резисторов Rос и Rвх, так чтобы они не превышали значение 1 МОм.
Задачу
синтеза системы регулирования можно
считать завершенной. Для расчета
переходных процессов отработки задающего
сигнала и возмущения Мс
целесообразно воспользоваться
компьютерной учебной программой
«Полином».
Переходная функция ![]() при отработке ступенчатого задающего
сигнала приведена на рис. 5.6. Из этого
графика видно, что динамические свойства
системы регулирования скорости
соответствуют техническим требованиям,
т.к. tпп=0,09
с,
=8
%, пк=1.
при отработке ступенчатого задающего
сигнала приведена на рис. 5.6. Из этого
графика видно, что динамические свойства
системы регулирования скорости
соответствуют техническим требованиям,
т.к. tпп=0,09
с,
=8
%, пк=1.
Рис. 5.16 График переходной функции отработки задающего воздействия