

4.2. Алгебраические критерии устойчивости
Наиболее распространен в инженерной практике алгебраический критерий Гурвица. Ниже приведены формулировки и методика применения критерия Гурвица.
Критерий Гурвица.
Запишем характеристическое уравнение системы n-го порядка
![]() .
.
Примечание.
В некоторых учебниках и задачниках по
курсу ТАУ используют другую индексацию
коэффициентов, а именно:
![]() .
.
Однако, важна не индексация коэффициентов характеристического уравнения, а соответствие каждого из них порядку производной в дифференциальном уравнении. Поэтому формально целесообразно использовать форму записи, при которой индекс коэффициента соответствует порядку производной.
Для анализа устойчивости с помощью критерия Гурвица необходимо составить матрицу коэффициентов характеристического уравнения следующего вида:
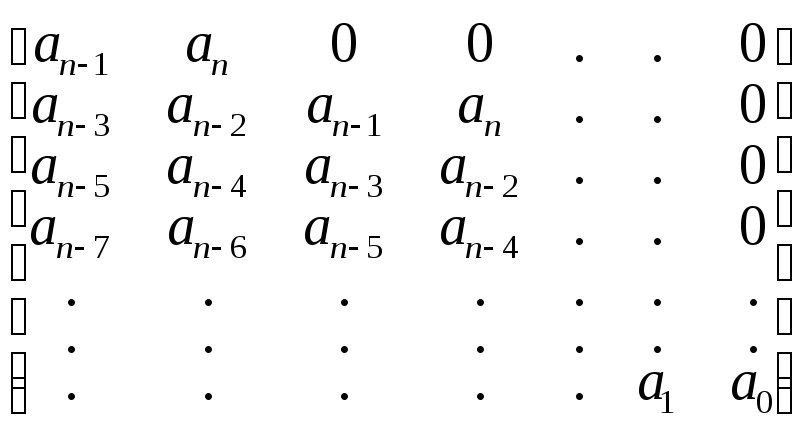 (4.10)
(4.10)
Линейная
система устойчива, если при ![]() >
0 положительны
все диагональные миноры матрицы
коэффициентов, т.е.
>
0 положительны
все диагональные миноры матрицы
коэффициентов, т.е.
![]() =
=
![]() >
0
>
0
![]() =
=
 >
0
>
0
![]() =
=
 >
0
>
0
и т.д., или в общем виде
![]() =
=
 >
0, i = 1,2, ..., n (4.11)
>
0, i = 1,2, ..., n (4.11)
Если хотя бы один из определителей (4.11) отрицателен, то система неустойчива.
Так
как последний столбец главного
определителя ![]() содержит всегда только один элемент
содержит всегда только один элемент ![]() ,
отличный от нуля, то согласно известному
свойству определителей
,
отличный от нуля, то согласно известному
свойству определителей
![]() =
= ![]()
![]() . (4.12)
. (4.12)
Если
![]() = 0, а все
остальные определители положительны,
то система находится на границе
устойчивости.
С учетом (4.12) это условие распадается
на два:
= 0, а все
остальные определители положительны,
то система находится на границе
устойчивости.
С учетом (4.12) это условие распадается
на два:
![]() =
0 и
=
0 и ![]() = 0. (4.13)
= 0. (4.13)
Условию
![]() =
0 соответствует
один нулевой корень, т.е. апериодическая
граница устойчивости, а условию
=
0 соответствует
один нулевой корень, т.е. апериодическая
граница устойчивости, а условию ![]() = 0 - пара
мнимых корней, т.е. колебательная граница
устойчивости.
= 0 - пара
мнимых корней, т.е. колебательная граница
устойчивости.
Совершенно очевидно, что для систем первого и второго порядка необходимым и достаточным условием устойчивости является положительность коэффициентов характеристического уравнения.
Для системы третьего порядка с характеристическим уравнением
![]()
условие устойчивости
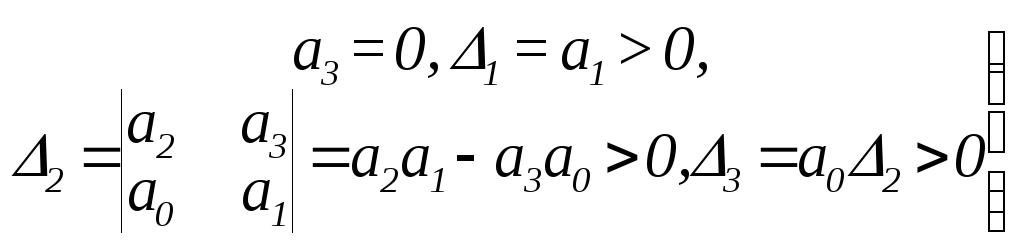 (4.14)
(4.14)
Последнее
неравенство при ![]() >0
эквивалентно
неравенству
>0
эквивалентно
неравенству ![]() >0.
Следовательно, для системы третьего
порядка, кроме положительности всех
коэффициентов характеристического
уравнения, требуется, чтобы
>0.
Следовательно, для системы третьего
порядка, кроме положительности всех
коэффициентов характеристического
уравнения, требуется, чтобы![]() >
0.
>
0.
У читывая
выражение для
читывая
выражение для![]() ,
можно сформулировать мнемоническое
правило оценки устойчивости систем
третьего порядка:
,
можно сформулировать мнемоническое
правило оценки устойчивости систем
третьего порядка:
произведение средних коэффициентов характеристического уравнения должно быть больше произведения крайних.
Для устойчивости системы четвертого порядка с характеристическим уравнением
![]() (4.15)
(4.15)
кроме положительности всех коэффициентов требуется выполнение условия
![]() > 0. (4.16)
> 0. (4.16)
Нетрудно
доказать, что при положительности всех
коэффициентов условие (4.16) обеспечивает
выполнение необходимого неравенства
![]() >
0.
>
0.
Таким образом,
д ля
устойчивости систем не выше четвертого
порядка необходимо и достаточно, чтобы
все коэффициенты характеристического
уравнения и определитель
ля
устойчивости систем не выше четвертого
порядка необходимо и достаточно, чтобы
все коэффициенты характеристического
уравнения и определитель![]() были положительными.
были положительными.
Критерий Гурвица целесообразно применять для анализа устойчивости систем не выше пятого порядка. При n>5 достаточные условия устойчивости усложняются, а вычисления определителей становится громоздким.
Пример 4.1. Определим с помощью критерия Гурвица устойчивость САУ при следующих значениях параметров:
TЯ = 0,15 c; TM = 1 c; TП = 0,01 c; KΣ = 15.
Характеристическое уравнение системы
(TП p + 1)( TЯ TM p2 + TM p + 1) + KΣ = 0,
или
![]() ,
,
где a3 = TП TЯ TM = 0.01 1 0,15 = 0,0015 c3;
a2 = TЯ TM + TП TM = 1 0,15+ 1 0,01 = 0,16 c2;
a1 = TM + TП = 1 + 0,01 = 1,01 c;
a0 = 1+15 = 16.
Все коэффициенты характеристического уравнения положительны, т.е. необходимое условие устойчивости выполняется. Проверим выполнение достаточного условия, для чего вычислим определитель
2 = a1 a2 - a3 a0 = 1,01 0,16 - 0,0015 16 = 0,1616 - 0,0224 = +0,1376,
2 > 0, следовательно, система устойчива.
Решим теперь обратную задачу: определим, какое максимальное значение суммарного коэффициента усиления К допустимо по условию устойчивости.
Максимальное допустимое значение К определяется из условия нахождения системы на границе колебательной устойчивости. Это значение К называют критическим или граничным
2 = a1 a2 - a3 a0кр = 0,
отсюда a0кр = a1 a2 /a3 = 1,01 0,16/0,0015 = 107,73.
Ккр = a0кр - 1 = 107,73 - 1= 106,73.
Следовательно, рассмотренная в примере система устойчива, если К < Ккр.