

1.10 Анализ цифровых систем управления
При анализе цифровых систем управления их представляют в виде трех элементов: цифрового фильтра (регулятора), фиксатора и приведенной непрерывной части.
Передаточная функция
цифрового фильтра для типовых законов
управления получена в (1.32). Если в системе
имеет место экстраполятор нулевого
порядка с передаточной функцией
![]() ,
то с учётом того, что
,
то с учётом того, что
![]() ,
её можно записать так:
,
её можно записать так:
![]() .
Сомножитель
.
Сомножитель
![]() относят к линейной части, поэтому
передаточная функция приведённой
непрерывной части может быть записана
в таком виде:
относят к линейной части, поэтому
передаточная функция приведённой
непрерывной части может быть записана
в таком виде:
![]() .
(1.55)
.
(1.55)
Так как
![]() -переходная
функция линейной части системы, то
-переходная
функция линейной части системы, то
![]() -передаточную
функцию линейной части находят по
выражению:
-передаточную
функцию линейной части находят по
выражению:
![]() .
(1.56)
.
(1.56)
Записав дифференциальное уравнение в операторной форме, находят передаточную функцию линейной части:
Раскладывают
выражение
![]() на простейшие дроби. Для этого находят
корни знаменателя и записывают
соотношение:
на простейшие дроби. Для этого находят
корни знаменателя и записывают
соотношение:
|
|
(1.57) |
где
![]() и
и
![]() - корни полинома знаменателя.
- корни полинома знаменателя.
Методом неопределённых
коэффициентов находят
![]() ,
,![]() ,
,![]() и на основании свойства линейности по
таблицам определяют:
и на основании свойства линейности по
таблицам определяют:
![]()

где
![]() - период квантования.
- период квантования.
Обозначив
![]() ,
находят
,
находят
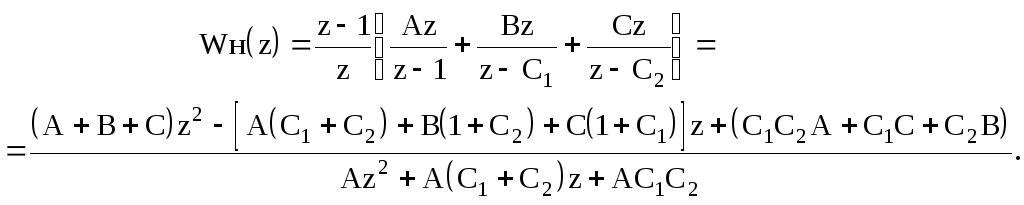
Поскольку в выражении
(1.57) числитель имеет полином первой
степени, то
![]()
|
|
|
где

Ниже приведена таблица некоторых соотношений непрерывных и дискретных функций
|
|
|
|
|
1 |
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


Результирующая передаточная функция разомкнутой системы с ЦВМ может быть определена как произведение передаточных функций приведённой непрерывной части и передаточной функции цифрового фильтра
|
|
(1.58) |
Связь выходной и
входной величины разомкнутой цифровой
системы, рассматриваемые в дискретные
моменты времени
![]() в изображениях определяют по формуле:
в изображениях определяют по формуле:
|
|
(1.59) |
где
![]() ,
,
![]() - изображения выходной и входной величины.
Дискретная передаточная функция
замкнутой системы по ошибке
- изображения выходной и входной величины.
Дискретная передаточная функция
замкнутой системы по ошибке
|
|
(1.60) |
а между заданным и действительным значением регулируемой величины
|
|
(1.61) |
Условием применимости
формул (1.60) и (1.61) является равенство
нулю переходной функции приведённой
непрерывной части при
![]() .
В системах с ЦВМ, где чистое запаздывание
отсутствует, требуется, чтобы
.
В системах с ЦВМ, где чистое запаздывание
отсутствует, требуется, чтобы
![]() имела степень полинома знаменателя
хотя бы на единицу больше степени
полинома числителя. Передаточные функции
имела степень полинома знаменателя
хотя бы на единицу больше степени
полинома числителя. Передаточные функции
![]() ,
,
![]() ,
,
![]() могут быть использованы для оценки
устойчивости и качества цифровых систем
управления. При рассмотрении сигнала
в дискретные моменты
могут быть использованы для оценки
устойчивости и качества цифровых систем
управления. При рассмотрении сигнала
в дискретные моменты
![]() необходимо использовать дискретные
передаточные функции для смещенных
моментов времени
необходимо использовать дискретные
передаточные функции для смещенных
моментов времени
![]() ,
,
![]() ,
,
![]() и т.д. , например
и т.д. , например
|
|
(1.62) |
Характеристическое уравнение замкнутой системы определяется путем приравнивания к нулю полинома знаменателя передаточной функции замкнутой системы либо путём приравнивания нулю суммы полиномов числителя и знаменателя передаточной функции разомкнутой системы.