

1.2 Решетчатые функции и разностные уравнения
Решетчатой называется
функция, которую образуют ординаты
непрерывной функции
![]() ,
соответствующие дискретным равноотстоящим
друг от друга значениям независимой
переменной, рисунок 1.2. Она равна нулю,
когда
,
соответствующие дискретным равноотстоящим
друг от друга значениям независимой
переменной, рисунок 1.2. Она равна нулю,
когда
![]() и обозначается
и обозначается
![]() ;
;
![]() - период дискретности;
- период дискретности;
![]() - любое целое число.
- любое целое число.
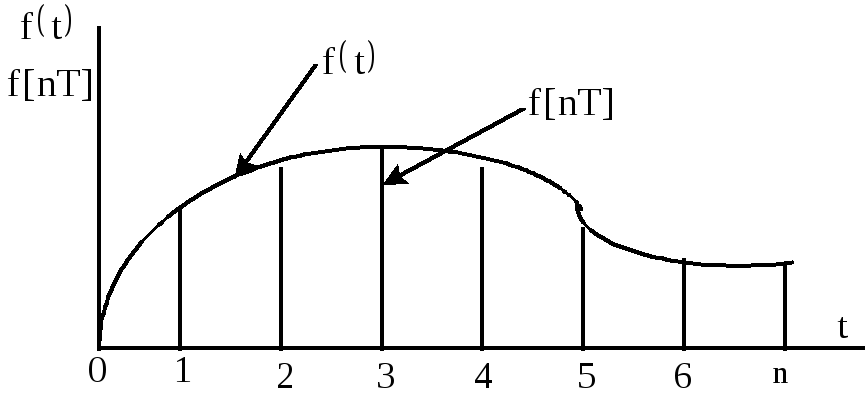
Рисунок 1.2 - Вид непрерывной и решетчатой функции
Для выявления
поведения непрерывной функции между
дискретными моментами вводят
промежуточное фиксированное время
![]() ,
которое может изменяться от
,
которое может изменяться от
![]() до
до
![]() .
.
![]()
Такая функция называется смещенной.
Использовав
относительное время, решетчатую функцию
запишем
![]() ,
или
,
или
![]() ,
где
,
где
![]() может изменяться в пределах от
может изменяться в пределах от
![]() до
до
![]() .
.
Скорость изменения
решетчатой функции
![]() характеризуется ее первой разностью:
характеризуется ее первой разностью:
![]() .
.
Разность второго порядка, или вторая разность
![]() ,
,
или
![]() .
.
Разность
![]() -того порядка определяется выражением
-того порядка определяется выражением
![]() ,
(1.4)
,
(1.4)
где
![]() - биномиальные коэффициенты.
- биномиальные коэффициенты.
При рассмотрении
цифровых систем используются разностные
уравнения, определяющие соотношения
между дискретной функцией
![]() и ее разностями различных порядков
и ее разностями различных порядков
![]() .
Их можно записать так:
.
Их можно записать так:
![]() ,
,
или
![]() ,
,
где
![]() - известная дискретная функция.
- известная дискретная функция.
При воздействии на линейную часть прямоугольных импульсов, имеющих разрывы, интегрирование возможно проводить для линейных уравнений только в промежутках времени, где разрывы отсутствуют. Это связано с тем, что наличие разрывов приводит к изменению постоянных интегрирования, которые определяются два раза за период. Этот метод построения переходного процесса является слишком громоздким и возможен для конкретных цифровых расчетов, исключающих анализ и синтез в общем виде.
Применение разностных уравнений позволяет избежать указанных недостатков. Рассмотрим методику получения уравнений в конечных разностях.
Разностное уравнение характеризует связь между переменными, разделенными целым числом периодов. Для возможности проведения анализа всей системы необходимо иметь все уравнения динамики в одной форме (например, в виде разностных уравнений). Найдем уравнение объекта в виде разностного уравнения. Для этого решим дифференциальное уравнение объекта
![]() (1.5)
(1.5)
Пусть
![]() ,
,
тогда
![]() ;
;
![]() ;
;
![]() .
.
Постоянную
интегрирования
![]() найдем из граничных условий в начале и
конце периода.
найдем из граничных условий в начале и
конце периода.
При
![]()
![]() (1.6)
(1.6)
В итоге получили разностное уравнение (1.6).
При решении системы
разностных уравнений возникает
необходимость исключения промежуточных
переменных. Это удобно выполнять
оперативным методом. С этой целью каждую
переменную представим в виде
![]() ,
,
где
![]() - номер наименьшего периода.
- номер наименьшего периода.
![]() .
.
В итоге получили алгебраическое уравнение.
При физической реализации алгоритмов управления используются левые конечные разности. Познакомимся с ними в процессе получения уравнения в конечных разностях для дифференциального уравнения второго порядка. Наиболее простым способом получения уравнений в конечных разностях по дифференциальным является метод замены производных соответствующими разностями.
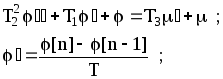
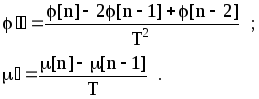
В рассматриваемом случае порядок, дифференциальных уравнений второй, поэтому используя соотношения:
![]()
![]() (1.7)
(1.7)
Дифференциальное уравнение можно записать через конечные разности, например:
Подставив значения
![]() ,
,
![]() ,
,
![]() ,
получим:
,
получим:
Приведя подобные члены и сделав обозначения:

получаем
![]() (1.8)
(1.8)
Второй метод получения
уравнений в конечных разностях
приближенный. Он тем точнее, чем
меньше
![]() .
Для уравнения (1.5) при использовании
второго метода легко получить уравнение
в конечных разностях, которое имеет вид
.
Для уравнения (1.5) при использовании
второго метода легко получить уравнение
в конечных разностях, которое имеет вид
![]() (1.9)
(1.9)
Если сравнить выражение (1.6) и (1.9), то мы увидим, что они отличаются друг от друга, поскольку (1.9) является приближенным, а (1.6) - точным. Приближенность (1.9) объясняется тем, что мы фактически используем для решения исходного дифференциального уравнения численный метод интегрирования.
Если разложить
коэффициенты при
![]() и
и
![]() выражения (1.6) в ряд Маклорена и
удержать только два первых члена, то
выражения (1.6) в ряд Маклорена и
удержать только два первых члена, то

т.е. коэффициенты
(1.9) являются первым приближением
коэффициентов (1.6) при разложении их
в ряд Маклорена в окрестности точки
![]() .
.
Второй способ более универсален, поскольку не требует знания правой части дифференциального уравнения и его решения.
Решение разностных уравнений
Линейные импульсные системы описываются линейными разностными уравнениями с постоянными коэффициентами. Они подчиняются принципу суперпозиции, поэтому их полное решение состоит из суммы решений однородного и неоднородного уравнения.
Пусть дано однородное уравнение
![]()
где
![]() - номер текущего периода (аналог времени
- номер текущего периода (аналог времени
![]() );
);
![]() - порядок разностного
уравнения.
- порядок разностного
уравнения.
Составим характеристическое уравнение, введя оператор
![]() ,
,
![]()
Отсюда характеристическое уравнение принимает вид
![]()
Решение однородного уравнения находим в виде
![]() (1.10)
(1.10)
где
![]() - корни характеристического уравнения.
- корни характеристического уравнения.
![]() - постоянные
коэффициенты, определяемые по начальным
условиям для решения неоднородного
уравнения.
- постоянные
коэффициенты, определяемые по начальным
условиям для решения неоднородного
уравнения.
Если
![]() имеет
имеет
![]() -тую
кратность, то решение запишем в виде
-тую
кратность, то решение запишем в виде
![]()
Частное решение неоднородного разностного уравнения находим в форме правой части (аналогично обыкновенным дифференциальным уравнениям).
Если
![]() - правая часть, то, когда
- правая часть, то, когда
![]() не совпадает ни с одним корнем, частное
решение записывается в виде
не совпадает ни с одним корнем, частное
решение записывается в виде
![]()
если
![]() совпадает с одним из корней кратности
"
совпадает с одним из корней кратности
"![]() "
то
"
то
![]()