

2.8 Фильтр Винера - Колмогорова
Фильтр Винера -
Колмогорова (2942 - 2942 гг.) позволяет
получить минимальную дисперсию ошибки
путем преобразования входного сигнала
![]() в выходной
в выходной
![]() ,
рисунок 2.3.
,
рисунок 2.3.
![]() (2.52)
(2.52)

Рисунок 2.3 - Расчетная схема фильтра
Используя характеристики случайных воздействий, получаем:
![]() (2.52)
(2.52)
Это уравнение называется уравнением Винера - Хопфа - Колмогорова.
![]() - весовая функция
фильтра может быть получена в результате
решения интегрального уравнения, которое
основано на классических методах
преобразования Фурье и известного как
метод спектральной факторизации,
применение которого возможно только
для стационарных процессов.
Оценки
- весовая функция
фильтра может быть получена в результате
решения интегрального уравнения, которое
основано на классических методах
преобразования Фурье и известного как
метод спектральной факторизации,
применение которого возможно только
для стационарных процессов.
Оценки
![]() можно найти только после того, как
найдена функция веса, т.е. ее нельзя
получить в темпе работы системы, что
ограничивает область применения метода.
можно найти только после того, как
найдена функция веса, т.е. ее нельзя
получить в темпе работы системы, что
ограничивает область применения метода.
Всякая измеренная
величина наряду с полезным сигналом
![]() содержит случайную помеху
содержит случайную помеху
![]() .
Задача фильтрации состоит в том, чтобы
возможно лучше отделить полезную
.
Задача фильтрации состоит в том, чтобы
возможно лучше отделить полезную
![]() составляющую общего сигнала
составляющую общего сигнала
![]() от помехи
от помехи
![]() .
С этой целью необходимо убедиться в
стационарности случайных процессов
.
С этой целью необходимо убедиться в
стационарности случайных процессов
![]() и
и
![]() ,
найти их статистические характеристики:
математическое ожидание, дисперсию,
корреляционную функцию, спектральную
плотность. На основании полученной
информации необходимо найти такую
динамическую систему, которая бы
обеспечила минимальную разницу между
полезным сигналом и сигналами на выходе
фильтра.
,
найти их статистические характеристики:
математическое ожидание, дисперсию,
корреляционную функцию, спектральную
плотность. На основании полученной
информации необходимо найти такую
динамическую систему, которая бы
обеспечила минимальную разницу между
полезным сигналом и сигналами на выходе
фильтра.
Импульсная переходная функция динамической системы будет оптимальна, если обеспечит условие:
![]() (2.53)
(2.53)
Разность полезного
сигнала и сигнала, прошедшего фильтр,
![]() ,
содержит две составляющие:
,
содержит две составляющие:
![]() -погрешность от частичного прохождения
помехи через фильтр;
-погрешность от частичного прохождения
помехи через фильтр;
![]() - погрешность от искажения формы полезного
сигнала при прохождении фильтра. Задача
фильтрации заключается в минимизации
суммарной погрешности и, как правило,
является компромиссной задачей.
- погрешность от искажения формы полезного
сигнала при прохождении фильтра. Задача
фильтрации заключается в минимизации
суммарной погрешности и, как правило,
является компромиссной задачей.
Обозначим
![]() тогда
тогда
![]() .
.
Спектральные плотности составляющих ошибки определяются так:
![]()
![]()
Спектральная плотность ошибки на выходе фильтра равна сумме составляющих:
![]()
Поскольку
![]() ,
то результирующее значение спектральной
плотности можно вычислить так:
,
то результирующее значение спектральной
плотности можно вычислить так:
![]() Поскольку
Поскольку
![]() ,
а средний квадрат ошибки
,
а средний квадрат ошибки
![]() ,
то, минимизируя
,
то, минимизируя
![]() по
по
![]() и
и
![]() ,
приходим к следующей системе уравнений:
,
приходим к следующей системе уравнений:
![]()
![]()
Из выражения для
первой частной производной следует,
что при
![]() .
.
Учитывая это соотношение можно записать из выражения для второй частной производной:
![]() (2.54)
(2.54)
В этих выражениях звездочки обозначают оптимальные значения переменных. Если удается реализовать фильтр с оптимальными параметрами, то спектральная плотность ошибки может быть определена по формуле:


![]() (2.55)
(2.55)
Из полученного
выражения следует, что, если спектры
полезного сигнала и помехи не перекрываются,
то
![]() в интервале частот, где
в интервале частот, где
![]() ,
а
,
а
![]() и
и
![]() на всем интервале частот, при которых
на всем интервале частот, при которых
![]() .
.

Рисунок 2.4 - Графики спектральной плотности
Таким образом, если
полезный сигнал и помеха имеют один и
тот же спектр частот, то нельзя получить
спектральную плотность ошибки меньше:
![]() .
.
Литература
1 Пугачев В.И. Методические указания и программы расчета основных
характеристик систем автоматического управления. Краснодар, Изд.
КубГТУ, 1996, - 77с.
2 Изерман Р. Цифровые системы управления. - М.:Мир,1984г.-541 с.
3 Куо Б. Теория и проектирование цифровых системы управления.
- М.: Машиностроение, 1986, - 447 с.
ПРИЛОЖЕНИЕ
Пример расчета замкнутой стохастической системы с использованием пакета Mathcad
Рассмотрим систему, изображенную на рисунке 1.2. Пусть передаточные функции остались прежними, а параметры САУ имеют конкретные значения:
![]() ,
,
![]() ,
,
![]() ,
,
 .
.
 ,
,
![]() .
.
 ,
,
 .
.
 ,
,
 .
.
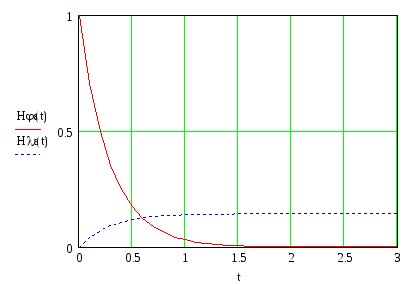
Переходные функции
замкнутой системы по каналам: задание
– ошибка управления (![]() и возмущение – ошибка управления (
и возмущение – ошибка управления (![]()
![]() ,
,
![]() ,
,
![]()
Как видно из графиков, в системе имеет место статическая ошибка по каналу – возмущение – ошибка управления.
Интегральные квадратичные оценки при единичном входном воздействии можно найти непосредственным интегрированием:
 ,
,
![]() .
.
 ,
,
![]() .
.
Для определения дисперсии ошибки при произвольном случайном входном воздействии используем частотные характеристики замкнутой системы по соответствующим каналам.
Примем:
![]() ,
,
 ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,

![]() ,
,
 ,
,
 ,
,
![]()

 ,
,
![]()
 ,
,
![]() ,
ранее (
,
ранее (![]() ).
).
 ,
,
![]() ,
ранее (
,
ранее (![]() ).
).
Как видно из расчетов, результаты получились близкими к предыдущим.

Графики
амплитудно-частотных характеристик
замкнутой системы по каналам: задание
– ошибка управления (![]() и возмущение – ошибка управления (
и возмущение – ошибка управления (![]()
К сожалению, полученные аналитические результаты не всегда можно применить в реальных условиях. Дело в том, что минимальная дисперсии ошибки управления может иметь место при неустойчивой системе. Это обстоятельство заставляет минимизировать дисперсию ошибки при дополнительном условии – заданной относительной степени затухания переходного процесса. При этом на линии равной степени затухания в качестве рабочей точки берут точку с максимальным отношением Кр/Ти (а не правее максимума, как для детерминированных систем).
Для рассматриваемого случая:
 ,
,
![]() .
.
Очевидно, что при отрицательном коэффициенте усиления замкнутая САУ будет неустойчива.
 ,
,
 ,
,
 ,
,
 .
.
![]() ,
,
![]() ,
,
![]()

![]()
 ,
,
 ,
,
![]() ,
,
 ,
,
 ,
,
![]()
Итак, при Кр = 7:
![]() ,
,
при
![]() :
:
![]() .
.
Таким образом, использование Mathcad позволяет легко производить расчеты стохастических параметров систем управления.