

1.9 Цифровые аналоги типовых законов управления
Рассмотрим методику
получения уравнений в конечных разностях
и
![]() -передаточных
функций эквивалентных законам управления
общепромышленных регуляторов на примере
наиболее сложного ПИД -закона
управления, из которого могут быть
получены другие, как частные случаи.
-передаточных
функций эквивалентных законам управления
общепромышленных регуляторов на примере
наиболее сложного ПИД -закона
управления, из которого могут быть
получены другие, как частные случаи.
Интегро-дифференциальное уравнение ПИД регулятора
![]() ,
(1.45)
,
(1.45)
где
![]() - коэффициент усиления;
- коэффициент усиления;
![]() - постоянная интегрирования;
- постоянная интегрирования;
![]() - постоянная дифференцирования.
- постоянная дифференцирования.
Для малых периодов
квантования
![]() это уравнение можно преобразовать в
разностное путем замены производной
первой разностью, а интеграла - суммой.
это уравнение можно преобразовать в
разностное путем замены производной
первой разностью, а интеграла - суммой.
Используя интегрирование по методу прямоугольников, выражение (1.45) можно записать так:
![]() .
(1.46)
.
(1.46)
Этот не рекуррентный
алгоритм управления требует для
формирования суммы помнить все предыдущие
значения сигнала ошибки, поэтому для
программирования на ЭВМ удобны
рекуррентные алгоритмы, которые для
вычисления управляющего воздействия
![]() требуют знания предыдущего значения
требуют знания предыдущего значения
![]() и поправочного члена. Если из (1.46)
вычесть
и поправочного члена. Если из (1.46)
вычесть
![]() ,
,
то получим рекуррентный алгоритм управления:
![]() ,
(1.47)
,
(1.47)
где
![]() .
.
Из уравнения (1.46) легко получаются соотношения для "П" и "ПД" регуляторов, когда отсутствует суммирование рассогласований
![]() ,
(1.48)
,
(1.48)
или
![]() ,
(1.49)
,
(1.49)
т.е. в этом случае
не требуется знание предшествующего
значения управляющего воздействия
![]() для получения
для получения
![]() .
Для "ПИ" -закона разностное уравнение
также получается из (1.46) с учетом знака
суммы, но без последнего слагаемого.
Легко видеть, что в этом случае
.
Для "ПИ" -закона разностное уравнение
также получается из (1.46) с учетом знака
суммы, но без последнего слагаемого.
Легко видеть, что в этом случае
![]() ,
(1.50)
,
(1.50)
где
![]() .
.
Для "И" -закона регулирования
![]() ,
(1.51)
,
(1.51)
где
![]() .
.
Используя основные свойства (линейности и сдвига) для нулевых начальных условий:
![]() ;
;
![]() ,
,
находят для регулятора, например, реализующего ПИД -закон регулирования:
![]() .
.
Взяв отношение
![]() -преобразования
выходной величины к
-преобразования
выходной величины к
![]() -
преобразованию входной при нулевых
начальных условиях, получают дискретную
передаточную функцию искомого элемента
системы.
-
преобразованию входной при нулевых
начальных условиях, получают дискретную
передаточную функцию искомого элемента
системы.
![]() .
(1.52)
.
(1.52)
В общем виде передаточную функцию цифрового фильтра можно записать так:
 .
.
Этот алгоритм может
быть реализован, если
![]() .
.
Соотношение порядка
полиномов числителя и знаменателя может
быть различным:
![]() или
или
![]() .
Обычно в регуляторах
.
Обычно в регуляторах
![]() ,
а
,
а
![]() .
Для исключения статической ошибки в
алгоритме управления
.
Для исключения статической ошибки в
алгоритме управления
![]() -го
порядка необходимо иметь полюс
-го
порядка необходимо иметь полюс
![]() .
Поэтому структура регулятора
.
Поэтому структура регулятора
![]() -го
порядка в простейшем случае имеет
вид:
-го
порядка в простейшем случае имеет
вид:
![]()
Наиболее распространенным
в практике управления является алгоритм
второго порядка,
![]() .
При подаче на вход регулятора единичного
сигнала, получаем:
.
При подаче на вход регулятора единичного
сигнала, получаем:
![]() ;
;
![]() ;
;
![]() ;
;
. . . . . . . . . . . . . .
![]() .
(1.53)
.
(1.53)
В случае, когда
![]() ,
дискретный регулятор соответствует
непрерывному ПИД -регулятору с
дополнительной задержкой на один
такт. Если
,
дискретный регулятор соответствует
непрерывному ПИД -регулятору с
дополнительной задержкой на один
такт. Если
![]() ,
то можно записать следующие соотношения
для параметров регулятора
,
то можно записать следующие соотношения
для параметров регулятора
![]() :
:
при
![]()
![]() или
или
![]() ;
;
при
![]() для
для
![]()
![]() или
или
![]() .
.
На рисунке 1.6 представлены переходные процессы для алгоритмов первого и второго порядков.
По аналогии с непрерывными регуляторами можно выделить следующие коэффициенты, характеризующие свойства регуляторов:
![]() - коэффициент
усиления;
- коэффициент
усиления;
![]() - коэффициент
опережения;
- коэффициент
опережения;
![]() - коэффициент
интегрирования.
- коэффициент
интегрирования.
Для положительного
коэффициента усиления регулятора
![]() ,
а диапазоны изменения параметров
регулятора такие:
,
а диапазоны изменения параметров
регулятора такие:
![]() .
.
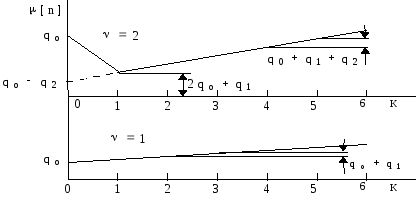
Рисунок 1.6 - Переходные функции цифровых регуляторов
На рисунке 1.7 показаны области изменения параметров ПИД -регулятора.
Если вычислены оптимальные параметры непрерывного ПИД регулятора, то по ним можно посчитать оптимальные параметры цифрового регулятора.
Обозначим
![]() .
.
Тогда ![]() ,
(1.54)
,
(1.54)
При этом дискретная
передаточная функция цифрового фильтра
принимает вид:
![]() .
.
При малых периодах квантования и высокой разрядности АЦП и ЦАП параметры цифрового фильтра можно находить как для непрерывного регулятора, после чего их следует пересчитать по формулам (1.54) для цифрового регулятора.
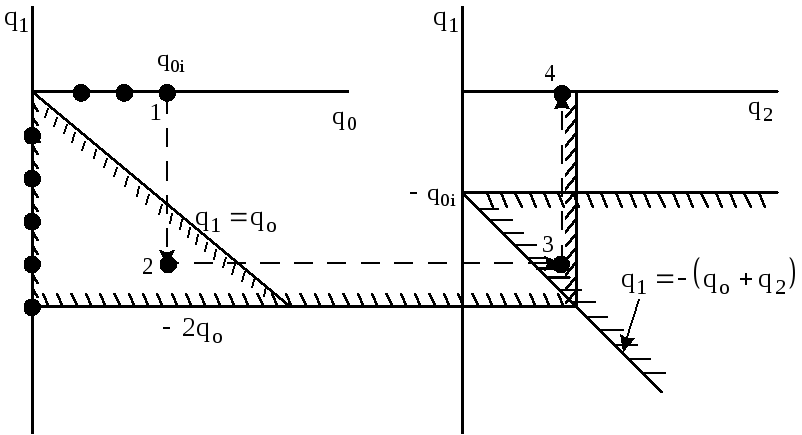
Рисунок 1.7 - Область параметров цифрового регулятора со свойствами непрерывного