

9.8.2. Блок задания функции matlab Fcn
Назначение:
Задает выражение в стиле языка программирования MATLAB.
Параметры:
MATLAB function – Выражение на языке MATLAB.
Output dimensions – Размерность выходного сигнала. Значение параметра –1 (минус один) предписывает блоку определять размерность автоматически.
Output signal type – Тип выходного сигнала. Выбирается из списка:
real – Действительный сигнал.
complex – Комплексный сигнал.
auto – Автоматическое определение типа сигнала.
Collapse 2-D results to 1-D – Преобразование двумерного выходного сигнала к одномерному.
Входной сигнал в выражении обозначается u, если он является скаляром. Если входной сигнал – вектор, необходимо указывать номер элемента вектора в круглых скобках. Например, u(1) и u(3) – первый и третий элементы входного вектора. Если выражение состоит из одной функции, то ее можно задать без указания параметров. Выражение может содержать также собственные функции пользователя, написанные на языке MATLAB и оформленные в виде m-файлов. Имя m-файла не должно совпадать с именем модели (mdl-файлом).
Рис. 9.8.2 демонстрирует применение блока MATLAB Fcn. В примере используется функция My_Matlab_Fcn_1, вычисляющая сумму и произведение двух элементов входного вектора. Текст функции (файл My_Matlab_Fcn_1.m) приведен ниже:
function y=My_Matlab_Fcn_1(x,k); y(1)=x*k; y(2)=x + k;
Выражение для вызова функции, заданное параметром MATLAB function, имеет вид: My_Matlab_Fcn_1(u(1),u(2)) .
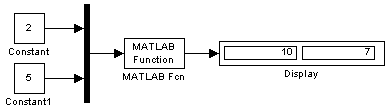
Рис. 9.8.2. Примеры использования блока MATLAB Fcn
[Скачать пример]
9.8.3. Блок задания степенного многочлена Polynomial
Назначение:
Задает степенной многочлен.
Параметры:
Polynomial coefficients – Вектор коэффициентов полинома. Коэффициенты расположены в векторе по убыванию степени независимой переменной. Например, для полинома х2+2х+5 необходимо задать вектор коэффициентов [1 2 5]. Коэффициенты должны быть действительного типа.
Блок вычисляет значение полинома по его коэффициентам и величине входного сигнала. Если входной сигнал вектор или матрица блок вычисляет результат для каждого элемента массива.
На рис. 9.8.3 показаны примеры использования блока Polynomial. В примерах для первого полиномиального блока коэффициенты заданы вектором [1 2 5], а для второго – [1 2 0 5].
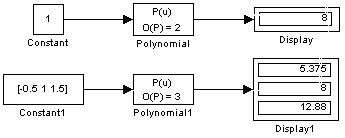
Рис. 9.8.3. Примеры использования блока Polynomial
[Скачать пример]
9.8.4. Блок одномерной таблицы Look-Up Table
Назначение:
Задает в табличной форме функцию одной переменной.
Параметры:
Vector of input values – Вектор значений входного сигнала. Может быть задан в виде дискретных значений (например, [1 2 7 9]), либо в виде непрерывного диапазона (например, [0:10]). Элементы вектора или граница диапазона могут быть заданы в виде вычисляемого выражения, например [tan(5) sin(3)].
Vector of output values – Вектор выходных значений, соответствующий вектору входных значений.
Блок работает в соответствии со следующими правилами:
Если входной сигнал равен одному из элементов вектора входных значений (Vector of input values), то выходное значение блока будет равно соответствующему элементу вектора выходных значений (Vector of output values). Например, пусть вектор входных значений равен [0 1 2 5], а вектор выходных значений [-5 –10 3 100], тогда при входном сигнале равном 1 выходной сигнал будет равен –10.
Если входной сигнал не совпадает ни с одним из элементов вектора входных значений, то блок выполняет линейную интерполяцию между двумя ближайшими к нему элементами.
Если входной сигнал выходит за границы вектора входных значений, то блок выполняет линейную экстраполяцию по двум крайним элементам.
График функции, заданный с помощью настроек блока отображается на его пиктограмме.
Входной сигнал блока может быть векторным. В этом случае блок выполняет поэлементную операцию.
На рис. 9.8.4 показан пример использования блока Look-Up Table. В примере вектор входных значений равен [-5:5], а вектор выходных значений равен tanh([-5:5]).
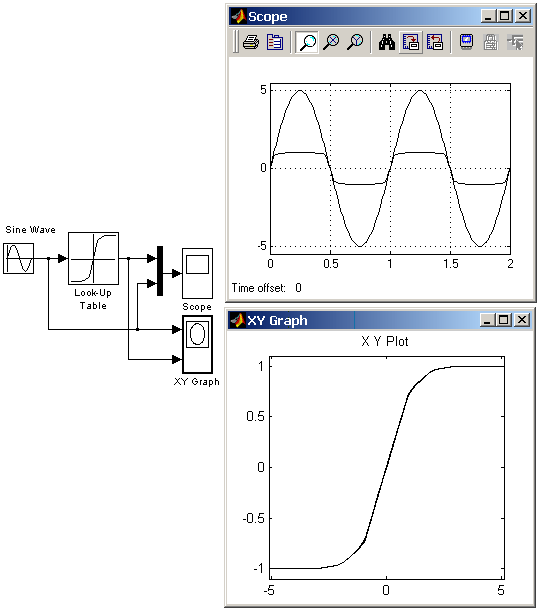
Рис. 9.8.4. Пример использования блока Look-Up Table
[Скачать пример]