

9.3.3. Блок Memory
Назначение:
Выполняет задержку входного сигнала на один временной такт.
Параметры:
Initial condition – начальное значение выходного сигнала.
Inherit sample time (флажок) – Наследовать шаг модельного времени. Если этот флажок установлен, то блок Memory использует шаг модельного времени (Sample time) такой же, как и в предшествующем блоке.
На рис. 9.3.6 показан пример использования блока Memory для задержки дискретного сигнала на один временной такт.
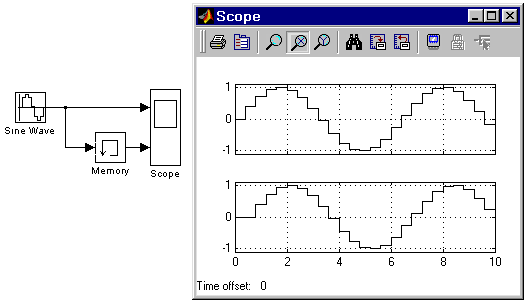
Рис. 9.3.6. Применение блока для задержки сигнала на один временной такт
[Скачать пример]
9.3.4. Блок фиксированной задержки сигнала Transport Delay
Назначение:
Обеспечивает задержку входного сигнала на заданное время.
Параметры:
Time Delay — Время задержки сигнала (не отрицательное значение).
Initial input — Начальное значение выходного сигнала.
Buffer size — Размер памяти, выделяемой для хранения задержанного сигнала. Задается в байтах числом, кратным 8 (по умолчанию 1024).
Pade order (for linearization) — Порядок ряда Паде, используемого при аппроксимации выходного сигнала. Задается целым положительным числом.
При выполнении моделирования значение сигнала и соответствующее ему модельное время сохраняются во внутреннем буфере блока Transport Delay. По истечении времени задержки значение сигнала, извлекается из буфера и передается на выход блока. В том случае, если шаги модельного времени не совпадают со значениями моментов времени для записанного в буфер сигнала, блок Transport Delay выполняет аппроксимацию выходного сигнала.
В том случае, если начального значения объема памяти буфера не хватит для хранения задержанного сигнала, Simulink автоматически выделит дополнительную память. После завершения моделирования в командном окне MATLAB появится сообщение с указанием нужного размера буфера.
На рис. 9.3.7 показан пример использования блока Transport Delay для задержки прямоугольного сигнала на 0.5 с.
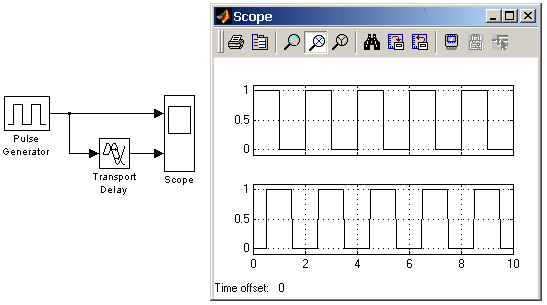
Рис. 9.3.7. Пример использования блока Transport Delay для задержки сигнала.
[Скачать пример]
9.3.5. Блок управляемой задержки сигнала Variable Transport Delay
Назначение:
Выполняет задержку входного сигнала, заданную величиной сигнала управления.
Параметры:
Maximum delay — Максимальное значение времени задержки сигнала (не отрицательное значение).
Initial input — Начальное значение выходного сигнала.
Buffer size — Размер памяти, выделяемой для хранения задержанного сигнала. Задается в байтах числом, кратным 8 (по умолчанию 1024).
Pade order (for linearization) — Порядок ряда Паде, используемого при аппроксимации выходного сигнала. Задается целым положительным числом.
Блок управляемой задержки Variable Transport Delay работает аналогично блоку постоянной задержки сигнала Transport Delay.
В том случае, если значение управляющего сигнала задающего величину задержки превышает значение, заданное параметром Maximum delay, то задержка выполняется на величину Maximum delay.
На рис. 9.3.8 показан пример использования блока Variable Transport Delay. Величина времени задержки сигнала изменяется от 0.5c до 1с в момент времени равный 5с.
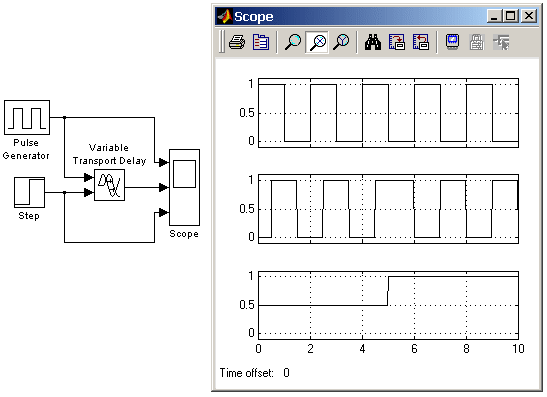
Рис. 9.3.8. Пример использования блока Variable Transport Delay.
[Скачать пример]