

1.4. Геометрический смысл и графический метод решения задач линейного программирования
Очевидно, множество допустимых решений L задачи ЛП в любой форме записи является выпуклым, как пересечение конечного числа выпуклых множеств. В общем случае оно представляет собой один из следующих объектов:
– плоскость;
– полупространство;
– многогранник (ограниченный или нет);
– многоугольник;
– прямую;
– полупрямую;
– отрезок;
– точку;
– пустое множество.
Целевую функцию задачи ЛП Z можно геометрически интерпретировать как уравнение гиперплоскости в n-мерном пространстве. Придавая Z различные частные значения, мы будем получать различные гиперплоскости или плоскости уровня целевой функции.
В соответствии с теоремой 4 экстремум Z достигается в крайней точке области L, исходя из этого, предлагается следующий графический метод решения задачи ЛП:
Берем произвольную плоскость (в двумерном пространстве – линию) уровня целевой функции Z (как правило, это плоскость Z = 0, или плоскость нулевого уровня). Пользуясь известным свойством градиента функции нескольких переменных, который направлен в сторону возрастания соответствующей функции, будем перемещать плоскость уровня параллельно самой себе в направлении градиента, пока она не достигнет какой-либо крайней точки области L. Очевидно, мы получим точку максимума Z. Наоборот, перемещая плоскость нулевого уровня в направлении антиградиента Z, в соответствующей крайней точке получим минимум Z. Напомним, что в случае линейной целевой функции
![]() .
.
Кроме того, градиент всегда перпендикулярен линии уровня целевой функции в той точке, в которой он построен. На практике, применяя графический метод, мы можем наблюдать следующие случаи.
Область ограничена, существуют оба экстремума.
О
Рис.
1.4.1![]() ,
0 1
(рис.1.4.2).
,
0 1
(рис.1.4.2).
Рис.
1.4.2
Если L не ограничена, то один из экстремумов Z может не достигаться, однако наличие условий неотрицательности на переменные гарантирует наличие второго экстремума (см. рис.1.4.3):

С
Рис.
1.4.3![]()
![]()
П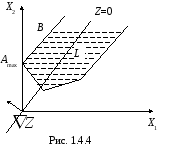 редельное
положение разрешающей гиперплоскости
совпадает с бесконечным ребром
неограниченной области L (рис.
1.4.4). Известна одна крайняя точка А.
В этом случае аналитически находят
координаты какой-нибудь другой точки
В, лежащей на этом же ребре, и
записывают решение задачи в виде:
редельное
положение разрешающей гиперплоскости
совпадает с бесконечным ребром
неограниченной области L (рис.
1.4.4). Известна одна крайняя точка А.
В этом случае аналитически находят
координаты какой-нибудь другой точки
В, лежащей на этом же ребре, и
записывают решение задачи в виде:
![]() ,
0 < . (1.4.1)
,
0 < . (1.4.1)
Существенным недостатком графического метода является его ограниченная применимость. Он удобен при размерности n = 2 (иногда n = 3), а при большей размерности его можно использовать только в единственном случае:
Пусть задача содержит только ограничения-равенства в количестве m, причем разность n – m (количество степеней свободы задачи) не больше трех. В этом случае из матрицы А системы ограничений методом Жордана – Гаусса выделяются m базисных переменных, которые выражаются через n – m свободных. Затем применяются ограничения xj 0, j = 1, 2, …, n, которые дают возможность построить область допустимых решений для свободных переменных в пространстве размерности не более 3. В целевой функции все базисные переменные также выражаются через свободные и находится оптимальное решение графическим методом в пространстве n – m измерений. Затем координаты оптимальной точки подставляются в выражения для базисных переменных и получают решение полной n-мерной задачи.
Пример 1.4.1. Решить графическим методом следующую задачу линейного программирования:
 (1.4.2)
(1.4.2)
Решение. Выпишем матрицу системы ограничений и преобразуем ее методом полного исключения (выделены ведущие элементы):
Таблица 1.4.1
|
1 |
3 |
1 |
2 |
0 |
0 |
7 |
|
1 |
1 |
0 |
1 |
0 |
0 |
3 |
|
2 |
1 |
1 |
2 |
1 |
0 |
9 |
|
–1 |
0 |
0 |
1 |
1 |
1 |
5 |
|
–1 |
1 |
1 |
0 |
0 |
0 |
1 |
|
1 |
1 |
0 |
1 |
0 |
0 |
3 |
|
0 |
–1 |
1 |
0 |
1 |
0 |
3 |
|
–2 |
–1 |
0 |
0 |
1 |
1 |
2 |
|
–1 |
1 |
1 |
0 |
0 |
0 |
1 |
|
1 |
1 |
0 |
1 |
0 |
0 |
3 |
|
1 |
–2 |
0 |
0 |
1 |
0 |
2 |
|
–2 |
–1 |
0 |
0 |
1 |
1 |
2 |
|
–1 |
1 |
1 |
0 |
0 |
0 |
1 |
|
1 |
1 |
0 |
1 |
0 |
0 |
3 |
|
1 |
–2 |
0 |
0 |
1 |
0 |
2 |
|
–3 |
1 |
0 |
0 |
0 |
1 |
0 |
В результате x3, x4, x5, x6 оказались базисными переменными, а x1, x2 – свободными. Выражаем базисные переменные через свободные и из условий неотрицательности задачи (1.4.2) получаем:

 (1.4.3)
(1.4.3)
Преобразуем целевую функцию:
![]()
![]() .
Теперь строим
на плоскости (x10x2)
множество точек, удовлетворяющих
системе ограничений (1.4.3):
.
Теперь строим
на плоскости (x10x2)
множество точек, удовлетворяющих
системе ограничений (1.4.3):

Очевидно, градиент Z = (–1, –2), поэтому минимум достигается в точке А, которая лежит на пересечении прямых, соответствующих 1-му и 2-му ограничениям из (1.4.3):
 Отсюда
А
= (1; 2).
Отсюда
А
= (1; 2).
Из
условий (1.4.2) находим оптимальные
значения остальных переменных: x3 = 0;
x4 = 0;
x5 = 5;
x6 = 1.
Окончательно: Хmin
= (1; 2; 0;
0; 5; 1). Минимальное значение Z
равно:
![]() Задача полностью решена.
Задача полностью решена.