

2.2. Общая задача нелинейного программирования. Классификация вычислительных методов
Общую задачу нелинейного программирования (в дальнейшем НЛП) обычно записывают в виде:

![]() (2.2.1)
(2.2.1)
При
этом подразумевается, что либо
![]() ,
либо любая из функций, задающих
ограничения, являются нелинейными.
,
либо любая из функций, задающих
ограничения, являются нелинейными.
Приведем определения и терминологию, характерные для задач нелинейного программирования:
Вектор
![]() ,
доставляющий экстремум
,
доставляющий экстремум
![]() ,
называется оптимальной
точкой, а
соответствующее значение
,
называется оптимальной
точкой, а
соответствующее значение
![]() – оптимальным
значением целевой функции. Пара
– оптимальным
значением целевой функции. Пара
![]() ,
,
![]() называется оптимальным
решением.
называется оптимальным
решением.
Целевая
функция называется унимодальной,
если она имеет единственный экстремум,
в противном случае она называется
мультимодальной.
У мультимодальной функции различают
глобальный
(или
абсолютный)
экстремум и локальные
(относительные)
экстремумы. Локальный
минимум
определяется как точка, в достаточно
малой окрестности которой
![]() Для глобального
минимума
это неравенство верно во всей области
D.
Подобным образом (но со знаком неравенства
≥) определяются локальный
и глобальный
максимум.
Для глобального
минимума
это неравенство верно во всей области
D.
Подобным образом (но со знаком неравенства
≥) определяются локальный
и глобальный
максимум.
Функция
![]() называется выпуклой
в области
D,
если для любых двух точек
называется выпуклой
в области
D,
если для любых двух точек
![]() имеет место неравенство:
имеет место неравенство:
![]() (2.2.2)
(2.2.2)
Если
в (2.2.2) знак неравенства <, то f
называется строго
выпуклой,
соответственно, если это неравенство
выполняется со знаками ≥ (>), то функция
называется вогнутой
(строго вогнутой).
Верны и такие соотношения: если функция
![]() выпукла, то
выпукла, то
![]() вогнута и наоборот.
вогнута и наоборот.
Дифференцируемая выпуклая функция обладает следующими свойствами:
![]()
3)
в области выпуклости
![]() имеет только один экстремум.
имеет только один экстремум.
Здесь мы применили обозначения:
![]() градиент
функции f,
соответственно
градиент
функции f,
соответственно
![]() –
транспонированный градиент, т. е.
вектор-строка;
–
транспонированный градиент, т. е.
вектор-строка;
![]() – матрица
Гессе функции f
или матрица, составленная из вторых
частных производных:
– матрица
Гессе функции f
или матрица, составленная из вторых
частных производных:
 (2.2.3)
(2.2.3)
Условие Н ≥ 0 означает неотрицательную определенность матрицы Н.
Из свойства 3) следует, что понятие выпуклости связано с понятием унимодальности, однако является более сильным:
F(х)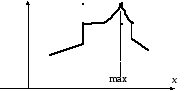
Рис. 2.2.1
На рисунке мы видим график разрывной недифференцируемой функции, которая, тем не менее, является унимодальной.
Определив понятие выпуклой функции, можно сформулировать важный частный случай общей задачи нелинейного программирования – задачу выпуклого программирования:
![]()
 (2.2.4)
(2.2.4)
При этом подразумевается, что функция f выпукла, а все функции gi вогнуты, т. е. ограничения образуют выпуклое множество. Исходя из перечисленных выше свойств, можно утверждать: локальный минимум задачи (2.2.4) одновременно является и глобальным. Аналогично, если целевая функция вогнута и ограничения образуют выпуклое множество, то локальный максимум совпадает с глобальным.
Пример 2.2.1. Рассмотрим задачу нелинейного программирования:
![]() +
4 → min;
+
4 → min;

![]()
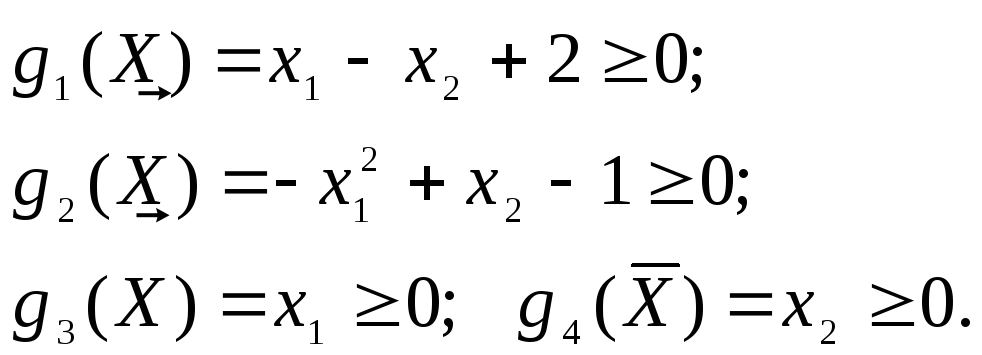
Очевидно,
![]()
![]() ,
следовательно, линиями уровня целевой
функции будут концентрические окружности
с центром в точке (2; 0).
,
следовательно, линиями уровня целевой
функции будут концентрические окружности
с центром в точке (2; 0).
х1
← допустимая область
Рис. 2.2.2
Очевидно, минимум целевой функции достигается в точке А, в которой «минимальная» линия уровня касается допустимой области. При этом глобальный и локальный минимумы совпадают. Проверим матрицы Гессе:
![]()
Значит, f выпукла, а g2 вогнута, g1 – линейная функция, т. е. является одновременно и выпуклой и вогнутой. Таким образом, данная задача относится к задачам выпуклого программирования.
В
данной задаче экстремум достигается
в граничной точке области D.
Такой экстремум будем называть условным
оптимумом.
Соответственно, ограничение-неравенство
![]() ,
которое обращается в нуль для точки
экстремума, называется активным
ограничением.
,
которое обращается в нуль для точки
экстремума, называется активным
ограничением.
Одним из важнейших типов задач нелинейного программирования являются задачи квадратичного программирования. Их постановка такова:

 (2.2.5)
(2.2.5)
Здесь
Q
– положительно определенная квадратная
симметрическая матрица; А – матрица
коэффициентов левых частей ограничений;
![]() и
и
![]() – векторы
из констант. Таким образом, задача
квадратичного программирования
– это задача минимизации квадратичной
целевой функции неотрицательных
переменных при линейных ограничениях.
– векторы
из констант. Таким образом, задача
квадратичного программирования
– это задача минимизации квадратичной
целевой функции неотрицательных
переменных при линейных ограничениях.
В
дальнейшем нам понадобятся аппроксимации
целевой функции
![]() в окрестности точки
в окрестности точки
![]() с помощью усеченного ряда Тейлора
с помощью усеченного ряда Тейлора
Линейная (или 1-го порядка):
![]() (2.2.6)
(2.2.6)
Квадратичная (или 2-го порядка):
![]()
Приведем теперь (без доказательств) необходимые и достаточные условия оптимальности решения для общей задачи нелинейного программирования.
А. Задачи без ограничений
![]()
Необходимые
условия локального минимума в точке
![]() :
:
Достаточные условия: