

Часть 2. Нелинейное программирование
Прежде чем рассмотреть вопросы, связанные с общей постановкой задачи нелинейного программирования, остановимся на одном классе задач, методы решения которых очень близки к методам линейного программирования.
2.1. Дробно-линейное программирование
2.1.1. Постановка задачи
Достаточно часто в оптимизационных задачах приходится находить экстремум дробно-линейной целевой функции вида:
![]() (2.1.1)
(2.1.1)
Примеры
1. Обозначим через хj время работы по j-ой технологии, а через cj и dj – соответственно производственные затраты и выход продукции в единицу времени. Тогда целевая функция Z будет представлять собой себестоимость продукции и, очевидно, уместно поставить задачу ее минимизации.
2. С другой стороны, определим хj аналогично, а cj и dj – соответственно как чистый доход и затраты в единицу времени. Тогда Z будет представлять собой рентабельность производства и ее надо максимизировать.
Общую задачу дробно-линейного программирования (в дальнейшем длп) обычно записывают в виде:
![]()
при ограничениях:
 (2.1.2)
(2.1.2)
Очевидно, что, как и в линейном программировании, ограничения любого другого вида могут быть приведены к форме (2.1.2), возможно с применением дополнительных переменных. Достаточно часто рассматривается и так называемая неоднородная дробно-линейная целевая функция:
![]() (2.1.3)
(2.1.3)
Окончательно, можно сказать, что задача ДЛП – это задача нахождения экстремума дробно-линейной целевой функции на множестве неотрицательных значений независимых переменных при линейных ограничениях. Исходя из этого, можно утверждать, что, как и в задачах линейного программирования (в дальнейшем – ЛП), область допустимых решений L является выпуклым множеством и содержит конечное число крайних точек. Также сохраняются все основные определения теории ЛП: допустимое решение, базисное решение, оптимальное решение.
Для обоснования методов решения задач ДЛП важную роль играют следующие теоремы:
Теорема 1. Дробно-линейная функция Z является монотонной на любом прямолинейном отрезке, принадлежащем области L.
Теорема 2. Дробно-линейная функция Z достигает своего экстремума в крайней точке области L.
Теорема 3. Если функция Z достигает экстремума одновременно в нескольких крайних точках области L, то это же значение она принимает в любой точке, представимой в виде выпуклой линейной комбинации этих крайних точек.
Доказательство этих теорем приведено в книге [1].
2.1.2. Графическое решение задач длп
Так же как и в ЛП, данный метод применим лишь при небольшой размерности задачи и особенно хорошо он иллюстрируется для n = 2.
Сначала рассмотрим однородную задачу ДЛП:
![]() (2.1.4)
(2.1.4)
Для применения данного метода существенным является предположение о том, что знаменатель (2.1.4) нигде в области L не обращается в нуль. Рассмотрим какую-нибудь линию уровня функции Z = Z0:
![]() (2.1.5)
(2.1.5)
Выразим отсюда х2 через х1:
![]()
Теперь мы видим, что линии уровня Z представляют собой прямые, проходящие через начало координат и имеющие угловой коэффициент:
![]() .
.
( см.
рис. 2.1.1):
см.
рис. 2.1.1):
Очевидно, k зависит от Z0. Выясним характер этой зависимости при помощи исследования производной:
![]() (2.1.6)
(2.1.6)
Мы видим, что знаменатель дроби положителен, а числитель не зависит от Z0, следовательно, производная сохраняет постоянный знак в области L, причем этот знак зависит от знака выражения Δ = d1c2 – d2c1. Именно:
– если Δ > 0, то с ростом Z растет и k, или, что аналогично, с ростом k растет и Z;
– с другой стороны, если Δ < 0, то с ростом k Z уменьшается.
На этих соображениях основан графический метод решения задач ДЛП. Предлагается следующий алгоритм:
-
Вычисляем величину Δ и определяем ее знак.
-
Строим область допустимых решений L и произвольную прямую вида х2 = kx1, проходящую через начало координат (линию уровня Z).
-
Если Δ > 0, вращаем построенную прямую вокруг начала координат против часовой стрелки (это соответствует возрастанию k) до соприкосновения с последней крайней точкой области L, в этой точке и будет находиться максимум функции Z.
-
Наоборот, если Δ < 0, вращаем линию уровня вокруг начала координат по часовой стрелке и в последней крайней точке найдем максимум Z.
5. Для нахождения минимума Z действия, описанные в п.п. 3 и 4 производятся «с точностью до наоборот»: при Δ > 0 вращаем линию уровня по часовой стрелке, при Δ < 0 – против.
При этот могут встретиться различные случаи:

Z = Zmin Z = Zmax
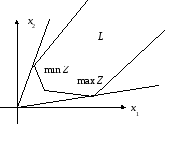
Рис. 2.1.3. Область не ограничена, но
оба экстремума существуют (∆ < 0)

Рис. 2.1.4. Область не ограничена, мах
достигается, min асимптотический
(∆ > 0)

Рис. 2.1.5. Область не ограничена,
оба экстремума асимптотические
(∆ < 0)
Рассмотрим теперь неоднородную задачу ДЛП:
![]() (2.1.7)
(2.1.7)
Посредством линейной замены переменных преобразуем целевую функцию в однородную. Именно, перенесем начало координат в точку (ξ1, ξ2), введя новые переменные y1 и y2 по формулам: х1 = у1 + ξ1, х2 = у2 + ξ2. Тогда
![]()
Подберем ξ1 и ξ2 так, чтобы данная функция стала однородной. Для этого решаем систему уравнений:

Из системы находим координаты нового начала координат М = (ξ1, ξ2). Дальнейшие действия аналогичны описанным выше:
-
Вычисляем величину Δ и определяем ее знак.
-
Строим область допустимых решений L и произвольную прямую, проходящую через точку М (линию уровня Z).
-
В зависимости от знака Δ и от необходимого экстремума вращаем эту линию уровня вокруг точки М по тем же правилам, как и в однородном случае.
Замечание: Как и в случае однородной целевой функции проверяем, чтобы ни в одной точке области L знаменатель дроби (2.1.7) не обращался в нуль.
Пример 2.1.1. Рассмотрим следующую задачу ДЛП:

Так как целевая функция неоднородна, находим точку М = (ξ1, ξ2), вокруг которой будем вращать линию уровня. Решаем систему уравнений:
 Получаем:
Получаем:
![]()
Вычисляем Δ = d1c2 – d2c1 = 1*3 + 1*1 = 4 > 0, значит для нахождения минимума будем вращать разрешающую прямую по часовой стрелке. Строим область L:

![]()
Рис. 2.1.6.
Очевидно, вращая линию уровня Z = Z0 вокруг точки М, мы получим решение задачи на минимум в крайней точке области L – точке A = (27/4; 3/4). Эти координаты мы находим, решив систему из уравнений прямых, пересекающихся в этой точке:
 х1
– х2 = 6;
х1
– х2 = 6;
х1 +
3х2 = 9. Zmin
=
 .
.