

1.5.1.1. Использование матрицы податливости системы
В наиболее компактной матричной форме система диффе-ренциальных уравнений ( 1.14 ) представляется так:
![]() ,
( 1.16
)
,
( 1.16
)
где – матрица внешней упругой податливости рассчитывае-
мой системы по направлениям возможных перемеще-
ний масс ( степеней свободы ); её компонентами явля-
ются
величины
ik
(![]() )
–
перемещения
в
заданной
)
–
перемещения
в
заданной
системе по направлениям инерционных силовых факто-
ров
Ji
(t)
(![]() ))
от
единичных
силовых воздействий
))
от
единичных
силовых воздействий
Свойства
компонентов матрицы податливости:
1.
Собственные перемещения
ii
–
существенно
положительные.
2.
Побочные перемещения облада-ют
свойством
взаимности
(
по
теореме Максвелла
):
ik
=ki
при
3.
Матрица податливости – положи-тельно
определённая.
![]() .
.![]() ( см.
рис. 1.16
):
( см.
рис. 1.16
):
. . . . . . . . . . . . . . .
.
. . . . . . . . . . . . . . .
.
 ;
;
![]() –
векторы функций
ускорений, скоростей
–
векторы функций
ускорений, скоростей
и перемещений масс:
![]()

 – матрица*)
обоб-
– матрица*)
обоб-
щённых ( приведённых ) масс, совершающих перемеще-
ния yi
(t)
(![]() );
);
![]()

 – матрица
– матрица
коэффициентов неупругого сопротивления движению
( применяется также термин «матрица демпфирования» );
P – матрица перемещений от наибольших ( амплитудных )
значений заданных динамических воздействий:
. . . . . . . . . . . . . . .
. . . . . .
. . . . . . . . . . . . . . .
. . . . . .

(t) – вектор временных функций заданных воздействий:
![]()
* )
В дальнейшем будут рассмотрены случаи,
когда матрица масс – недиагональная
(
см.
п. 1.6
).
)
В дальнейшем будут рассмотрены случаи,
когда матрица масс – недиагональная
(
см.
п. 1.6
).
Уравнения ( 1.16 ) можно записывать также с разделением слагаемых, содержащих ускорения и скорости масс:
![]() .
( 1.16*)
.
( 1.16*)
Матричный вариант уравнений ( 1.15 ) выглядит так:
![]() ,
( 1.15*)
,
( 1.15*)
где
![]() –
векторы функций
инерционных
силовых
–
векторы функций
инерционных
силовых
факторов, их первых и вторых производных:
![]() –
вектор
вторых
производных
временных
функций задан-
–
вектор
вторых
производных
временных
функций задан-
ных
воздействий:
![]()
В литературе
встречаются различные обозначения
мат-риц, входящих
в уравнения
движения: вместо
используются А,
В
или D;
в [ 1
]
система (
1.16*)
имеет вид
![]() ,
существует вариант
,
существует вариант
![]() и др.
и др.
1.5.1.2. Уравнения движения с матрицей жёсткости системы
Свойства деформируемой системы, согласно принципу двойственности в механике, могут характеризоваться, наряду с матрицей упругой податливости, которая количественно оцени-вает способность системы деформироваться от механических воздействий, также матрицей жёсткости, характеризующей способность системы противостоять её деформированию. Как податливость, так и жёсткость системы оцениваются по опреде-лённым направлениям, назначаемым в зависимости от решаемой задачи. В динамике это направления компонентов перемещений масс или, что то же самое, соответствующих инерционных сило-вых факторов.
Матрица жёсткости ( обычно обозначается r ) – квадратная размерами n x n, каждый столбец которой состоит из значений силовых факторов, одновременно действующих по направлени-ям всех перемещений масс и вызывающих равное единице пере-мещение с номером, равным номеру столбца, при равенстве нулю всех остальных перемещений. Смысл компонентов k-го столбца
1
2 i k n
rnk
rik
r1k
r2k
1




















 матрицы жёсткости
по-
матрицы жёсткости
по-
показан на примере про-

 стой
балки (
рис.
1.18
),
стой
балки (
рис.
1.18
),
rkk



мера степеней свободы.
Рис. 1.18
направлены в одну сто-
рону, но фактически некоторые из них могут быть противопо-ложными, т. е. отрицательными.
Обозначения r1k , r2k , …, rik , …, rkk , …, rnk приняты потому, что указанные силовые факторы могут рассматриваться как ре-акции воображаемых связей, поставленных по направлениям сте-пеней свободы, от единичного смещения k-й связи. На рис. 1.19 эти же величины представлены для ранее рассматривавшейся общей расчётной модели,
п
rkk
rik
r1k
rk+1,
k
yk
=
1


у
rnk






























 словно
введённых связей
словно
введённых связей
п
ri+1,
k
















н
r2k




































 Матрица
жёсткости
Матрица
жёсткости
системы ( матрица внеш-
ней жёсткости по направ-
лениям степеней свободы
масс ) имеет следующую
структуру: Рис. 1.19
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
Свойства
компонентов матрицы жёсткости:
1.
Собственные единичные реакции
rii
–
существенно
положительные.
2.
Побочные реакции обладают
свой-ством
взаимности
(
по
теореме Рэлея
):
rik
=rki
при
3.
Матрица жёсткости – положитель-но
определённая.
![]() .
.
где rik
(![]() )
– реакция i-й
)
– реакция i-й
условной связи от единичного смещения k-й связи.
Компоненты матрицы жёсткости r можно находить расчё-том рассматриваемой системы на n вариантов кинематических воздействий ( последовательных смещений n связей в точках рас-положения сосредоточенных масс) известными методами теории сооружений. Но матрица жёсткости может быть также получена как обратная по отношению к матрице податливости:
r = –1 – ( 1.18 )
это свойство матриц r и доказывается в основном курсе строи-тельной механики; для систем с одной степенью свободы имеет место известная и очевидная зависимость r11 = 1/11 , где r11 и 11 – коэффициенты жёсткости и податливости соответственно.
Уравнения движения, в которых свойства деформируемой системы описываются матрицей жёсткости, получаются из сле-дующих соображений: если к безмассовой системе с дополни-тельными связями по направлениям степеней свободы масс, от-делённых от системы, приложить заданные воздействия, инер-ционные и диссипативные силовые факторы ( рис. 1.20 ), а также задать указанным связям смещения, равные динамическим пере-мещениям y1(t), y2 (t), …, yi (t), …, yk (t), …, yn (t), то деформации, реакции опор и внутренние усилия будут такими же, как в рас-считываемой системе без связей, следовательно, полные реакции всех введённых связей станут равными нулю:
Ji
(t)
+ FDi
(t)
![]() ).
( 1.19
)
).
( 1.19
)
Jk+1(t)
+ FD,
k+1(t)
Jk
(t)
+ FDk
(t)
F(t)



J1(t)
+ FD1(t)
Jn–1
(t)
+ FD,
n–1
(t)





k














i
k
+1 n

















J2(t)
+ FD2(t)
2





























Jn
(t)
+ FDn
(t)







1



(t) y









q(t)




x z

Рис. 1.20







Руководствуясь принципом суперпозиции и учитывая, что воздействия Ji (t) и FDi (t) воспринимаются непосредственно i–й связью, полную реакцию этой связи Ri (t) представляем в виде
Ri (t) = – Ji (t) – FDi (t) + Riy(t) +RiP (t) , ( 1.20 )
где Riy (t) – составляющая реакции i-й связи от одновременных
смещений y1(t), …, yi (t), …, yk (t), …, yn (t) всех связей;
RiP (t) – вклад в реакцию Ri (t) всех заданных воздействий.
Используя
для описания доли
![]() ,
вносимой в Riy(t)
,
вносимой в Riy(t)
с
Riy
(t)
=
![]() .
(
1.21
)
.
(
1.21
)![]() =
rik
yk
(t),
тогда
=
rik
yk
(t),
тогда
воздействий:
RiP(t)
=![]() ,
(
1.22
)
,
(
1.22
)
где
![]() –
реакция i-й
связи от наибольшего (
амплитудного
) зна-
–
реакция i-й
связи от наибольшего (
амплитудного
) зна-
чения Рр ( см. рис. 1.15 ) р-го заданного воздействия
(
величины
![]() определяются
расчётом
системы
с
за-
определяются
расчётом
системы
с
за-
креплёнными точками расположения масс на np вари-
антов воздействий Рр ).
З а м е ч а н и е: если заданные воздействия приведены к эквивалент-
ным силам Feqvl (t), приложенным в точках расположения масс, что является
стандартной
процедурой в расчётах методом конечных
элементов, реакции
![]() оказываются
равными амплитудам
соответствующих
эквивалентных
сил
и
оказываются
равными амплитудам
соответствующих
эквивалентных
сил
и
направленными противоположно им.
Подстановка ( 1.21 ) и ( 1.22 ) в ( 1.20 ) и учёт ( 1.19 ) даёт
– Ji
(t)
– FDi
(t)
+
![]() +
+![]() =
0 ,
=
0 ,
![]() .
( 1.23
)
.
( 1.23
)
Если выбрать в качестве основных неизвестных функции перемещений y(t), то после использования ( 1.2 ) и ( 1.3 ) для вы-ражения J(t) и FD (t) через производные от y(t), получаем систему дифференциальных уравнений движения масс
![]() +
kf,i
+
kf,i![]() +
+![]() =
–
=
–![]() ,
,
![]() ( 1.24
)
( 1.24
)
или в развёрнутом виде:
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .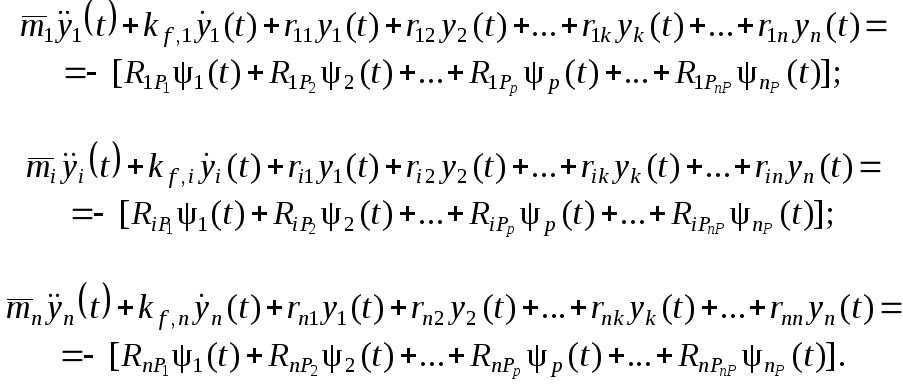

В компактной матричной записи уравнения ( 1.25 ) пред-ставляются так:
![]() ,
( 1.26
)
,
( 1.26
)
где
. . . . . . . . . . . . . . .
. . . . .
. . . . . . . . . . . . . . .
. . . . .
– матрица реакций
связей по направлениям компонентов
пе-ремещений
масс
от
наибольших
(амплитудных) значений задан-ных
динамических
воздействий;
остальные матрицы – как в ( 1.16 ).
Из ( 1.24 ) двойным дифференцированием ( подобно тому, как это было сделано при переходе от ( 1.14 ) к ( 1.15 )) получа-ются уравнения движения с функциями инерционных сил J(t) в качестве основных неизвестных:
![]() +
kf,
i
+
kf,
i
![]() +
+![]() =
=![]() ,
,
![]() ;
( 1.27
)
;
( 1.27
)
в матричной форме:
![]() +
kf
+
kf
![]() +
+![]() =
=![]() .
( 1.28
)
.
( 1.28
)
Иные встречающиеся в литературе представления матрич-ных уравнений ( 1.26 ) с другими обозначениями величин:
![]() [
1
],
[
1
],
![]() и др.
и др.