

1.6. Обобщённые перемещения, группировка неизвестных и учет симметрии в динамических расчётах
В динамических
расчётах возможно, а в некоторых случа-ях
– рационально и иногда даже необходимо
вместо истинных перемещений масс
y(t)
=
[ y1(t)
y2(t)
…
yn(t)
]т
использовать их выражения через некоторые
другие величины, в частности, пе-ремещения
![]() ,
причём
зависимость
меж-ду y(t)
и
,
причём
зависимость
меж-ду y(t)
и
![]() представляется
в форме линейного преобразования вектора
представляется
в форме линейного преобразования вектора
![]() в вектор y(t):
в вектор y(t):
![]() ,
(
1.101
)
,
(
1.101
)
где – прямоугольная матрица преобразования векторов:
. . . . . . . . . . . . .
.
Величины
![]() ,
через
которые
по (
1.101
)
полностью
оп-
,
через
которые
по (
1.101
)
полностью
оп-
ределяются перемещения всех масс системы и которые, следо-вательно могут истолковываться как степени свободы масс, в механике называются обобщёнными координатами и обознача-ются q (t). В рассматриваемых далее задачах динамики деформи-руемых систем это обозначение не применяется из-за совпадения с интенсивностью распределённой динамической нагрузки.
С учётом
указанного
смысла величин
![]() будем называть
будем называть
их обобщёнными
перемещениями.
В общем случае
![]() .
.
y3
(t)
г
y2
(t)
y4
(t)

п



 еремещений
системы показы-
еремещений
системы показы-
в
y5
(t)




















![]()
в
 ыражены
через два
парамет-
ыражены
через два
парамет-
р
y1(t)
=![]()
![]() и
и
![]() ,
играющие
,
играющие
р







 оль
обобщённых перемещений:
оль
обобщённых перемещений:
l l
l
/2
l
/2



![]() ;
;





 y3(t)
= y4(t)
= ( l
/
h
)
y3(t)
= y4(t)
= ( l
/
h
)![]() ;
;
y5(t)
= 0,5 [![]() +
+![]() ]
]
или в форме ( 1.101 ): Рис. 1.37


![]()
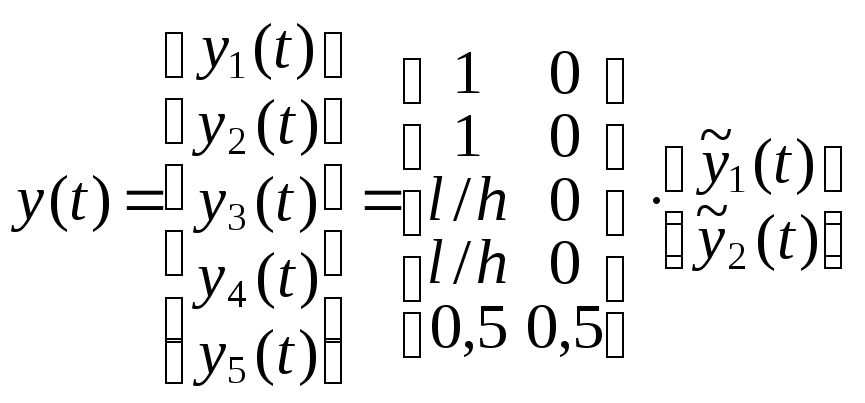 –
( 1.102
)
–
( 1.102
)
это случай, когда
n
>
n0
(
n
=
5, n0
=
2
).
y
(x,t)
![]()
![]()
y

 (x,
t)
по длине стержня. При
(x,
t)
по длине стержня. При
о


 писании
его оси в деформиро-
писании
его оси в деформиро-
в








![]()
![]()
мени t, по предложению акад.
В x


ч
l
/4
l
/4
l
/4
l
/4
э



 лемента
постоянного
сечения,
лемента
постоянного
сечения,
в виде кубического полинома Рис. 1.38
y
(x,
t)
=
a0
(t)
+
a1
(t)
x
+
a2
(t)
x2
+
a3
(t)
x3
из
граничных
условий
y
(0,
t)
=
![]() y
’(0,
t)
=
–
y
’(0,
t)
=
–![]() y
(l,
t)
=
y
(l,
t)
=
![]() y
’(l,
t)
=
–
y
’(l,
t)
=
–![]() имеем
имеем
![]()
![]() ,
тогда перемещения
,
тогда перемещения
как![]() y
( l
/4, t
), y2
(t)
y
( l
/4, t
), y2
(t)![]() y
( l
/2, t
) и y3
(t)
y
( l
/2, t
) и y3
(t)![]() y
( 3l
/4, t
) выражаются
через обобщённые
перемещения
y
( 3l
/4, t
) выражаются
через обобщённые
перемещения
![]() ,
согласно ( 1.101
),
,
согласно ( 1.101
),
(
3х4
)
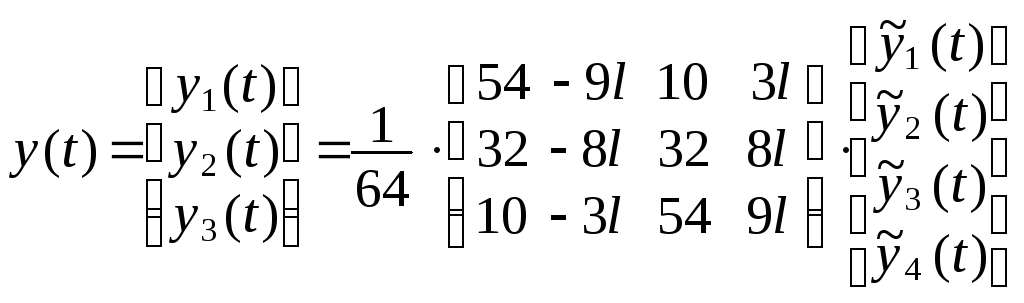 .
( 1.103
)
.
( 1.103
)
Использованный во втором примере приём аппроксимации истинных перемещений некоторой заранее выбираемой функци-ей типичен для метода конечных элементов.
Зависимости ( 1.102 ) и ( 1.103 ) выражают действительные перемещения масс y (t) через обобщённые перемещения ( коор-
динаты
)
![]() .
Обратная процедура
– отыскание
.
Обратная процедура
– отыскание
![]() по найден-
по найден-
ным каким-либо способом y (t) – при n > n0 и n < n0 невозможна ( матрица, обратная , не существует ). Но в тех достаточно рас-
пространённых
задачах, где n
=
n0
, векторы
y
(t)
и![]() ,
имеющие равные количества компонентов,
связываются друг с другом квадратной
матрицей
.
В этом случае наряду с прямой зависи-мостью
( 1.101
)
справедлива
и обратная
,
имеющие равные количества компонентов,
связываются друг с другом квадратной
матрицей
.
В этом случае наряду с прямой зависи-мостью
( 1.101
)
справедлива
и обратная
![]() ,
если
–
,
если
–
невырожденная (
Det
()
![]() 0
).
При
этом величины
0
).
При
этом величины
![]() ,
пред-
,
пред-
ставляемые в виде линейных комбинаций ( групп ) исходных ( дей-ствительных ) y (t), называются групповыми неизвестными. При назначении компонентов ik следует руководствоваться сообра-жениями упрощения расчёта, к сожалению, не всегда очевидны-ми ( далее будут рассмотрены случаи, когда для формирования матрицы удаётся использовать простые физические представ-ления ).
В динамическом расчёте, кроме обобщённых ( или группо-
вых
) перемещений
![]() ,
фигурируют
соответствующие
им обоб-
,
фигурируют
соответствующие
им обоб-
щённые (
групповые
) инерционные
силовые факторы
![]() и порождающие их
обобщённые
(
приведённые
) массы
и порождающие их
обобщённые
(
приведённые
) массы
![]() .
Для по-
.
Для по-
лучения их выражений
через действительные (
исходные
) массы
![]() используем физические зависимости
Д’Аламбера
используем физические зависимости
Д’Аламбера
J(t)
= –![]() (
1.104
)
(
1.104
)
и
![]() (
1.105
)
(
1.105
)
и теорему Бетти о
взаимности возможных работ для одного
и того же равновесного (
по Д’Аламберу
) состояния
системы в мо-мент времени
t
,
описанного
парами
двойственных
величин
– y
(t)
и J(t),
![]() и
и![]() :
:
![]() (
1.106
)
(
1.106
)
Подставив ( 1.104 ) и ( 1.105 ) в ( 1.106 ), имеем
![]()
или, учитывая (
1.101
):
![]() ,
откуда
,
откуда
![]()
![]()
и окончательно
окончательно
![]() . ( 1.107
)
. ( 1.107
)
 Из (
1.106
) находим
также
Из (
1.106
) находим
также![]() . (
1.108
)
. (
1.108
)
Для системы по рис. 1.37 при трёх одинаковых массах по m
и
 diag
[ m
m
m
m
m
]
diag
[ m
m
m
m
m
]![]()
![]() =
diag
[ m
m
m
m
m
], тогда по ( 1.107
)
=
diag
[ m
m
m
m
m
], тогда по ( 1.107
)
![]()
по (1.108):
 .
.
В задаче для стержня по рис. 1.38 при средней массе 2m и двух других по m матрица приведённых ( обобщённых ) масс
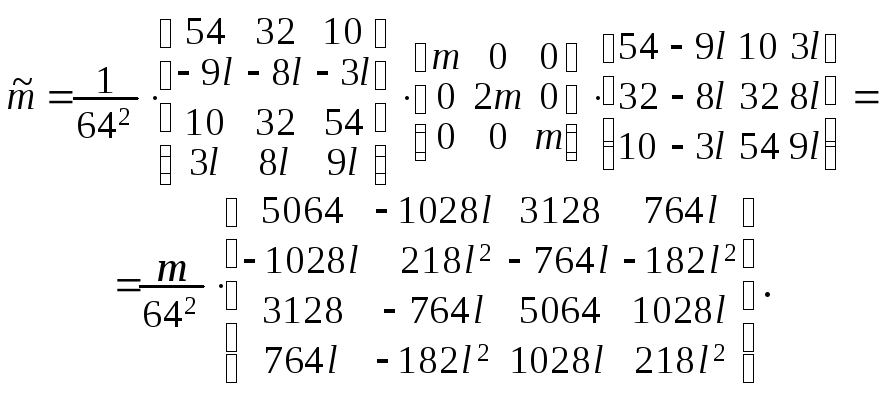
Для обоих примеров характерно то, что матрица приведён-ных масс – симметричная, но недиагональная. Эта её особен-ность обусловлена введением в рассмотрение обобщённых ( груп-повых ) перемещений и соответствующих им инерционных си-ловых факторов, порождаемых не отдельными массами, а груп-пами масс. Отметим, что исходные перемещения и силы инер-ции сами по себе сразу могут рассматриваться как групповые. Так, в показанной на рис. 1.37 раме с тремя одинаковыми мас-сами можно обнаружить группу взаимосвязанных перемещений в составе y1(t) = y2(t) и y3(t) = y4(t) = (l /h) y1(t) и группу сил инерции, составляющих единое целое и выражаемых через один общий параметр: две равные вертикальные силы инерции J1 (t) = = J2 (t) и горизонтальные J3 (t) = J4 (t) = (l /h) J1 (t). Другие при-меры будут даны далее.
Принципиально уравнения и формулы динамического рас-чёта с групповыми величинами – такие же, как в случае негруп-повых перемещений и силовых факторов. Поэтому в дальней-шем специальное обозначение для обобщённых ( групповых ) вели-чин – символ « ~ » – применяется только тогда, когда они фигу-рируют вместе с другими ( до группировки ), и их нужно разли-чать.
В связи с
этим укажем на некоторые уточнения в
истолко-вании ранее записанных в п.
1.5 уравнений
динамики. В матрич-ной форме (
1.16
), (
1.16*),
( 1.15*
), (
1.26
), (
1.28
) и их аналоги
в
табл.
1.2
–
1.6 остаются
неизменными, но матрицу масс
![]() в них следует рассматривать как
недиагональную, в связи с чем вво-дится
двухиндексное
обозначение компонентов матрицы масс:
в них следует рассматривать как
недиагональную, в связи с чем вво-дится
двухиндексное
обозначение компонентов матрицы масс:
![]() (
диагональные
–
(
диагональные
–
![]() ),
),
![]() .
Тогда выражения
(
1.104
),
являющиеся
обобщением зависимости (
1.2
) на случай
группо-вых величин, принимают вид
.
Тогда выражения
(
1.104
),
являющиеся
обобщением зависимости (
1.2
) на случай
группо-вых величин, принимают вид
![]() (
1.109
)
(
1.109
)
соответственно
![]() (
1.110
)
(
1.110
)
где
![]()
![]() m0
– параметр массы.
m0
– параметр массы.
Аналогично диссипативные силовые факторы FD (t) также
предполагаются
групповыми, а при использовании обобщённых
сил![]() формируется
матрица
обобщённых
коэффициентов
вязкого сопротивления
формируется
матрица
обобщённых
коэффициентов
вязкого сопротивления

![]() (
1.111
)
(
1.111
)
и определяются
определяются
![]() ,
(
1.112
)
,
(
1.112
)
причём
![]() –
обоб-щение
формулы (
1.3
).
–
обоб-щение
формулы (
1.3
).
По аналогии с единичными реакциями rik в формуле ( 1.21 ), выражающей
силовой
фактор Riy
(t)
через перемещения y(t),
величины
![]() в
(
1.109
),
посред-
в
(
1.109
),
посред-
ством
которых силовой
фактор
Ji
(t)
связывается с ускорениями
![]() ,
иногда
,
иногда
называют реакциями по направлению групповой силы Ji (t) от единичных уско-рений ( [ 1 ], [ 6 ] ). Из тех же соображений коэффициенты kf, ik при этом именуют
реакциями по направлению диссипативной силы FDi (t) от единичных скоростей.
Наконец, групповыми являются единичные перемещения ik и реакции rik в матрицах упругой податливости и жёсткости,
а также перемещения
![]() и
реакции
и
реакции
![]() от
амплитуд заданных воздействий.
от
амплитуд заданных воздействий.
С учётом ( 1.109 ) уравнения ( 1.14 ) получаются такими:
![]() +
yi
(t)
=
+
yi
(t)
=![]() (1.113)
(1.113)
Другие основные варианты уравнений динамики – ( 1.15 ), ( 1.24 ) и ( 1.27 ) представляются соответственно следующим об-
разом:
![]() =
–
=
–![]() ( 1.114
)
( 1.114
)
(здесь
![]() компоненты
обращённой
матрицы
масс
компоненты
обращённой
матрицы
масс
![]() );
);
![]() =
–
=
–![]() ,
,
![]() ;
( 1.115
)
;
( 1.115
)
![]() +
kf,
i
+
kf,
i
![]() +
+![]() =
=![]() ,
,
![]() .
(
1.116
)
.
(
1.116
)
Для особых случаев движения – гармонических колеба-ний – уравнения с групповыми неизвестными в рациональных вариантах записи, получаемые из ( 1.114 ) и ( 1.115 ) без учёта диссипации, имеют следующий вид:
при собственных колебаниях:
– в амплитудах инерционных силовых факторов
![]() ,
( 1.117
)
,
( 1.117
)
где
= 1/( m0
2
);
![]() ;
;
– в амплитудах перемещений
![]() (
1.118
)
(
1.118
)
= 1/
= m0
2
;
![]()
при установившихся вынужденных колебаниях от вибраци-онных воздействий:
– в амплитудах инерционных силовых факторов
![]() ,
( 1.119
)
,
( 1.119
)
где F
= 1/(
m0![]() );
);
– в амплитудах перемещений
![]() (
1.120
)
(
1.120
)
F
= 1/F
= m0![]() .
.
Матричные формы уравнений ( 1.117 ) – ( 1.120 ):
![]()
Матрицы
динамической податливости
![]() ,
,
![]() и динамичес-кой
жёсткости
и динамичес-кой
жёсткости
![]() рассчитываемой
системы отличаются от их
рассчитываемой
системы отличаются от их
аналогов, входящих в уравнения ( 1.51 ), ( 1.65 ), ( 1.83 ) и ( 1.92 ) с негрупповыми неизвестными, тем, что динамические поправки
могут быть не только в диагональных, но и в побочных компо-
нентах
этих матриц:
![]()
![]()
![]()
![]()
![]() .
(
1.121
)
.
(
1.121
)![]() или относи-тельных масс
или относи-тельных масс
![]() следует учитывать при выполнении
кинемати-ческой проверки результатов
расчёта на установившиеся гармо-нические
вынужденные колебания – левая часть (
1.87 ) должна вычисляться по формуле
следует учитывать при выполнении
кинемати-ческой проверки результатов
расчёта на установившиеся гармо-нические
вынужденные колебания – левая часть (
1.87 ) должна вычисляться по формуле
В решениях
задач о гармонических колебаниях по
уравне-ниям (
1.117
) и (
1.119
) в форме
метода сил бывает целесооб-разным такое
преобразование основных
неизвестных
–
амплитуд
инерционных сил,
когда n
исходных J
связываются c
равным числом
n0
=
n
обобщённых
( групповых
)
![]() в виде
в виде
![]() =
J
=
J![]() .
(
1.122
)
.
(
1.122
)
Из условия ( 1.106 ), записанного в амплитудах, получаются
зависимости для
определения матрицы приведённых масс
![]() и вектора
перемещений
и вектора
перемещений![]() ,
соответствующих
силовым
факторам
,
соответствующих
силовым
факторам
![]() :
:

![]() (
1.123
)
(
1.123
)
 и
и
![]() . (
1.124
)
. (
1.124
)
*)
В динамике сооружений симмет-ричной
считается система,
облада-ющая
симметрией
геометрии,
структуры
(размещения связей),
распределения
жёсткостей,
расположения
масс.
неизвестных позволяет сущест-
венно упростить динамические
расчёты симметричных систем*) –
в этих задачах переход от исходных ( действительных ) к новым ( групповым ) перемещениям масс или инерционным силовым факторам осуществляется наиболее просто – они представляют собой симметричные или обратносимметричные группы пе-
ремещений или сил, причём новых неизвестных столько же, сколько исходных, т. е. n0 = n . Возможно заменять исходные пе-
р m
Ось
сим-
метрии
Ji

с m
Jk

о
yi
yk
а)




н a a



п



![]()
![]()

 Так,
для двух симметрично расположенных
Так,
для двух симметрично расположенных
о




![]()
![]()
щ
б)


о



![]()
с

![]()
Рис. 1.39
в)![]()
![]()











![]()
парных
новых неизвестных – симметричных
![]()
(
рис.
1.39,
б
)
и обратносимметричных
![]() (
рис.
1.39, в
),
которые в сумме статически эквивалентны
исходной паре Ji
и Jk
: Ji
=
(
рис.
1.39, в
),
которые в сумме статически эквивалентны
исходной паре Ji
и Jk
: Ji
=![]() +
+![]() ;
Jk
=
;
Jk
=![]() –
–![]() или
или
![]() =
Ji
/
2
+ Jk
/
2
;
=
Ji
/
2
+ Jk
/
2
;
![]() =
Ji
/
2
– Jk
/
2
–
из коэффициентов при Ji
и Jk
в
двух послед- них зависимостях формируется
матрица преобразования неизвестных:
=
Ji
/
2
– Jk
/
2
–
из коэффициентов при Ji
и Jk
в
двух послед- них зависимостях формируется
матрица преобразования неизвестных:
![]() .
По формуле (
1.123
)
находится матрица приведённых масс:
.
По формуле (
1.123
)
находится матрица приведённых масс:
![]() – отсюда
видно, что приве-
– отсюда
видно, что приве-
дённая масса, соответствующая парному симметричному неизвестному Ji (или обратносимметричному Jk ) равна половине реальной массы.
![]() ,
то есть
,
то есть
![]() =
yi
+
yk
;
=
yi
+
yk
;
![]() =
yi
–
yk
–
эти же выражения можно по-
=
yi
–
yk
–
эти же выражения можно по-![]() и
и![]() ,
соответствующие групповым неиз-вестным
,
соответствующие групповым неиз-вестным
![]() и
и
![]() ,
определяются по (
1.124
):
,
определяются по (
1.124
):
лучить,
исходя из рис. 1.39, по которому легко
установить, что yi
=![]() (а),
yk
=
(а),
yk
=![]() (б).
Если далее рассмотреть работы
(б).
Если далее рассмотреть работы
![]() и
и
![]()
![]() групп сил
групп сил![]() и
и![]() на
соответствующих им перемещениях, то
очевидно, что
на
соответствующих им перемещениях, то
очевидно, что
![]() и
и
![]() ,
откуда с учётом симметрии пере-мещений
(
,
откуда с учётом симметрии пере-мещений
(![]() ,
,
![]() )
следует
)
следует![]() ,
,
![]() –
подстановка этих зависимостей в (а) и
(б) даёт
–
подстановка этих зависимостей в (а) и
(б) даёт![]() и
и![]() ,
чтоэквивалентно найденным выше по
формуле (
1.124
)
соотношениям между
yi
,
yk
,
,
чтоэквивалентно найденным выше по
формуле (
1.124
)
соотношениям между
yi
,
yk
,
![]() и
и![]() .
.
Ji–1
mi
Ось
сим-
метрии
Ji


![]() и
и![]() )
и одно – обратносимметричное (
)
и одно – обратносимметричное (![]() ).
).
С
Ji+1
mi+1
mi–1
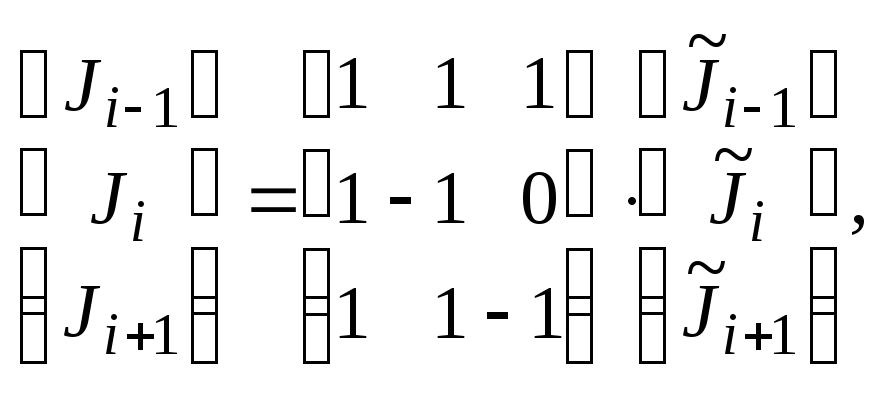
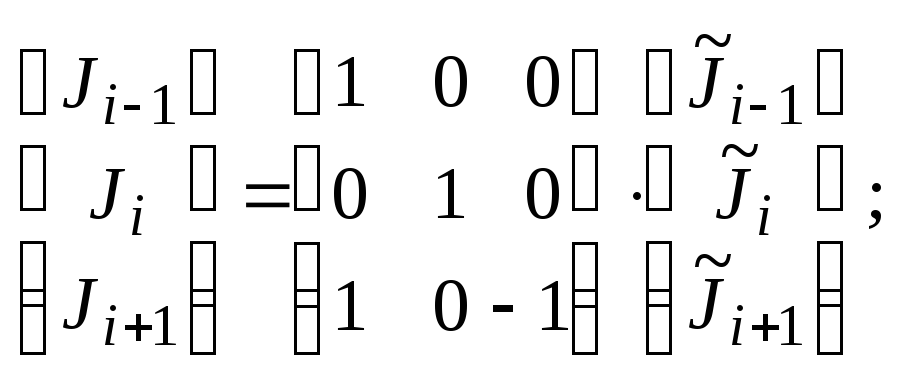
=
= mi+1


J








 i
,
Ji+1
и
групповыми
i
,
Ji+1
и
групповыми![]() ,
,![]() и
и![]() ,
согласно
,
согласно
р a a





![]()
![]()
![]()
![]()
![]() +
+![]() +
+![]() ,
,


 Ji
=
Ji
=![]() –
–![]() ,
или
,
или








![]()
![]()
![]()
![]()
![]()
![]() +
+![]() –
–![]() ,
,
о
Рис. 1.40![]()
и далее по ( 1.123 ):
 –
–
следует обратить внмание на то, что матрица приведённых масс получилась симметричной, но не диагональной.




![]()
![]()
![]()
![]()
![]()


![]()
![]()
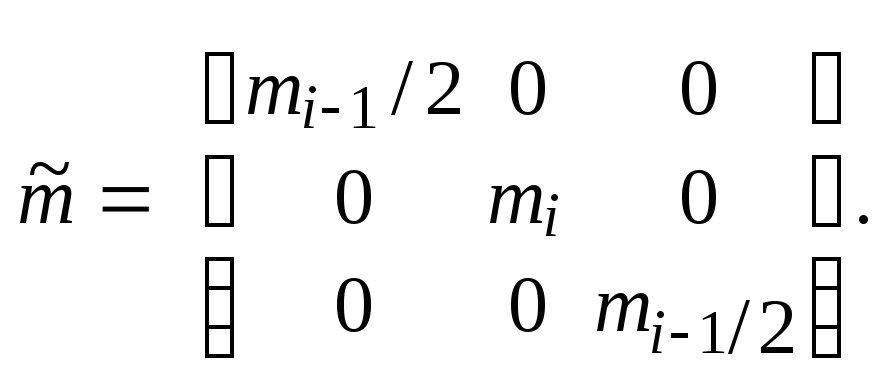



Рис. 1.41
С
групповыми
неизвестными
уравнения
собственных
коле-баний
записываются в виде
![]() ,
где
,
где
![]()
![]() мат-рица упругой податливости заданной
системы по направлениям групповых сил
инерции
мат-рица упругой податливости заданной
системы по направлениям групповых сил
инерции
![]() ,
компоненты которой вычисляются как
обобщённые единичные перемещения от
,
компоненты которой вычисляются как
обобщённые единичные перемещения от
![]()
![]() выделить две части, одна из которых
содержит только симметричные групповые
неизвестные
выделить две части, одна из которых
содержит только симметричные групповые
неизвестные
![]() ,
а другая –
только обратносимметричные
,
а другая –
только обратносимметричные
![]() ,
то уравнения коле-баний
приобретут следующую
,
то уравнения коле-баний
приобретут следующую
блочную структуру: ( 1.125 )
где
![]() –
матрица перемещений
–
матрица перемещений
по направлениям
симметричных неизвестных
![]() от единичных обратносимметричных сил
инерции
от единичных обратносимметричных сил
инерции
![]() ;
;
![]() –
матрица
переме-щений по направлениям
–
матрица
переме-щений по направлениям
![]() от
единичных
от
единичных
![]() .
.
Очевидно,
что
![]() ,
вследствие чего система (
1.125
) распадается
на две независимые подсистемы
,
вследствие чего система (
1.125
) распадается
на две независимые подсистемы
![]() и
и
![]() .
(
1.126
)
.
(
1.126
)
Уравнение
частот
собственных
колебаний
![]() при-нимает вид
при-нимает вид
![]() и также
порождает два
неза-
и также
порождает два
неза-
висимых частотных уравнения:
![]() и
и
![]() .
( 1.127
)
.
( 1.127
)
Первое из них даёт спектр частот симметричных форм собственных колебаний, а второе – обратносимметричных форм. Общее их число, конечно, равно числу степеней свободы масс n. Частоты симметричных и обратносимметричных форм входят в полный спектр «вперемешку».
Любая симметричная главная форма очевидным образом ортогональна любой обратносимметричной – это не требует осо- бой проверки. Следует контролировать ортогональность форм одного типа.
Форм собственных колебаний, не обладающих свойства-ми прямой или обратной симметрии, у симметричной системы не может быть.

( 1.128 )
и состоит из двух независимых подсистем
![]() и
и
![]() –
( 1.129
)
–
( 1.129
)
даже при произвольных ( асимметричных ) воздействиях это упрощает расчёт и уменьшает его трудоёмкость.
При симметричных ( или обратносимметричных ) воздей-ствиях неизвестные противоположного типа заведомо равны ну-лю, и содержащие их уравнения вообще можно не составлять.
Если динамический расчёт симметричной системы выпол-няется с использованием классических методов – сил, перемеще-ний или смешанного, то наряду с «главными» неизвестными – силами инерции или перемещениями масс – следует группиро-вать также и неизвестные соответствующего метода – X или Z .
Альтернативой расчёту симметричных систем с помощью группировки неизвестных является способ, основанный на разделении системы на две половины сечением по оси симметрии с последующим выполнением двух независимых расчётов одной половины – от-дельно на симметричную и обратносимметричную составляющие динамических воздействий при вынужденных колебаниях или при соответствующих типах собственных колебаний. В каждом из двух расчётов по линии разреза вводятся определённые комбинации связей, моделирующие влияние отброшенной половины при рассматриваемом – симметричном или обратносимметричном – движении системы. При формировании расчётной схемы половины системы массы и связи, расположенные на оси симметрии, делятся пополам, а стержни, продольные оси которых совпадают с осью симметрии, «расщепляются» вдоль оси на две части с половинной жёсткостью каждая. Подробности – в примере ( см. гл. 3 ).
В динамике сооружений достаточно часто встречаются задачи, где основные неизвестные расчёта в форме метода сил
с
m(1)
y1(2)
y1(1)
y1(3)
J1(1)
J1(3)
в
m(3)






 ыми
инерционными силовыми
ыми
инерционными силовыми
ф
m(2)
y2
J1(2)












р
J2
именно – из-за наличия взаимо-
с
Рис. 1.42



мещениями масс*). Например, в
р
*)
В таких задачах применять формулы (
1.123
) и (
1.124
) нельзя,
так как прео-
бразование (
1.122
) не
используется. аме
( рис.
1.42 )
при неучёте продольных деформаций
стержней
аме
( рис.
1.42 )
при неучёте продольных деформаций
стержней
число степеней
свободы трёх масс равно 2. Роль степеней
сво-боды играют независимые друг от
друга перемещения – гори-зонтальное
y1![]() y1(1)
массы m(1)
и вертикальное y2
массы m(2)
. Го-ризонтальные
перемещения масс m(2)
и m(3)
не являются
незави-симыми – они равны y1,
т.е. y1(2)
=
y1(3)
= y1
. Вследствие
этого силы инерции J1(2)
и
J1(3)
оказываются
зависящими от J1(1)
: J1(2)
= = k1
J1(1)
;
J1(3)
= k2
J1(1)
(
здесь k1
=
m(2)
/
m(1)
; k2
=
m(3)
/
m(1)
). Таким
образом,
первой степени свободы
y1
соответствует
группа из
трёх сил –
J1(1)
,
J1(2)
и
J1(3)
, объединённых
общим параметром J1(1)
.
y1(1)
массы m(1)
и вертикальное y2
массы m(2)
. Го-ризонтальные
перемещения масс m(2)
и m(3)
не являются
незави-симыми – они равны y1,
т.е. y1(2)
=
y1(3)
= y1
. Вследствие
этого силы инерции J1(2)
и
J1(3)
оказываются
зависящими от J1(1)
: J1(2)
= = k1
J1(1)
;
J1(3)
= k2
J1(1)
(
здесь k1
=
m(2)
/
m(1)
; k2
=
m(3)
/
m(1)
). Таким
образом,
первой степени свободы
y1
соответствует
группа из
трёх сил –
J1(1)
,
J1(2)
и
J1(3)
, объединённых
общим параметром J1(1)
.
За основное
групповое неизвестное
![]() можно принять
ли-
можно принять
ли-
бо сумму трёх истинных сил инерции J1(1) + J1(2) + J1(3) , либо их общий параметр J1(1) .
В первом
варианте
![]() =
J1(1)
+
J1(2)
+
J1(3)
. Из условия
равен-ства работ WJy
=
=
J1(1)
+
J1(2)
+
J1(3)
. Из условия
равен-ства работ WJy
=![]() истинных
сил инерции и групповой
истинных
сил инерции и групповой
![]() на
со-ответствующих им перемещениях
получается J1(1)
y1(1)
+
J1(2)
y1(2)
+
на
со-ответствующих им перемещениях
получается J1(1)
y1(1)
+
J1(2)
y1(2)
+
J1(3)
y1(3)
=![]() ( J1(1)
+
J1(2)
+
J1(3)
)
( J1(1)
+
J1(2)
+
J1(3)
)
![]() откуда при y1(2)
=
y1(3)
= y1(1)
следует,
что
откуда при y1(2)
=
y1(3)
= y1(1)
следует,
что
![]() y1(1)
.
Подставив
в то же равенство
работ выра-
y1(1)
.
Подставив
в то же равенство
работ выра-
жения сил инерции через перемещения и массы J1(1) = m(1) 2 y1(1) ,
J1(2)
=
m(2)
2
y1(2)
,
J1(3)
=
m(3)
2
y1(3)
,
J2
=
m(2)
2
y2
,
![]() =
=![]() (
на основании
закона инерции в
случае
гармонических колебаний с
(
на основании
закона инерции в
случае
гармонических колебаний с
частотой
), имеем: 2
(
m(1)![]() +
m(2)
+
m(2)![]() +
m(3)
+
m(3)![]() )
=
)
=
![]() – из
этого
соотношения
при y1(1)
=
y1(2)
= y1(3)
=
– из
этого
соотношения
при y1(1)
=
y1(2)
= y1(3)
=![]() находится
приве-дённая масса
находится
приве-дённая масса
![]() соответствующая
групповому
неизвестному
соответствующая
групповому
неизвестному![]() =
= J1(1)
+
J1(2)
+
J1(3)
:
=
= J1(1)
+
J1(2)
+
J1(3)
:
![]() m(1)
+
m(2)
+
m(3)
–
результат
истолковывается
m(1)
+
m(2)
+
m(3)
–
результат
истолковывается
просто: суммарную силу инерции порождает суммарная масса ).
Тот же результат можно получить, не записывая заново условие равенства работ, а используя формулу ( 1.107 ), если перемеще-ния y1(1) , y1(2) , y1(3) и y2 объединить в исходный вектор y и при-
н
 .
.![]() y1(1)
и y2
в качестве обобщённых
перемещений
y1(1)
и y2
в качестве обобщённых
перемещений
![]() .
То-гда матрица преобразования неизвестных
.
То-гда матрица преобразования неизвестных
![]() имеет вид
имеет вид
![]() и
и![]() =
= =
=
Во втором
варианте
![]() =
J1(1)
. Следуя
той же схеме, что и ранее, получаем
J1(1)
y1(1)
+
k1
J1(1)
y1(2)
+
k2
J1(1)
y1(3)
=
=
J1(1)
. Следуя
той же схеме, что и ранее, получаем
J1(1)
y1(1)
+
k1
J1(1)
y1(2)
+
k2
J1(1)
y1(3)
=![]() (*), откуда находим
(*), откуда находим
![]() =
y1(1)
(
1
+
k1
+
k2
) – иное,
чем в первом варианте. Да-лее, расписывая
в (*) силы инерции через массы, перемещения
и
=
y1(1)
(
1
+
k1
+
k2
) – иное,
чем в первом варианте. Да-лее, расписывая
в (*) силы инерции через массы, перемещения
и
2
, после
сокращения на (
y1(1)
)2
определяем
приведённую мас-су
![]() m(1)
/
(
1
+
k1
+
k2
).
m(1)
/
(
1
+
k1
+
k2
).
Для конкретных значений масс m(1) = m(2) = m(3) = m приведённые массы по 1-му и 2-му вариантам получаются соответственно 3m и m / 3.
Различия в расчётах по двум вариантам состоят в следую-щем:
в единичном
состоянии при
![]() =
1 в
первом варианте к систе-
=
1 в
первом варианте к систе-
ме прикладывается одна сила, равная единице, а во втором – три ( соответственно 1, k1 и k2 ) или одна, но равная 1 + k1 + k2 ;
полученную в
результате решения задачи силу инерции
![]() в первом варианте
следует
распределить между
J1(1)
, J1(2)
и
J1(3)
как
в первом варианте
следует
распределить между
J1(1)
, J1(2)
и
J1(3)
как
(
m(1)
/![]() ,
( m(2)
/
,
( m(2)
/![]() и ( m(3)
/
и ( m(3)
/![]() ,
а во втором варианте
при-нять J1(1)
=
,
а во втором варианте
при-нять J1(1)
=![]() ,
J1(2)
= k1
,
J1(2)
= k1![]() и
J1(3)
= k2
и
J1(3)
= k2![]() .
.
Практическое значение имеет также случай неточечной массы m ( рис. 1.43, а ) в виде относительно тонкого ( bm << lm ) недеформируемого стержня, жёстко прикреплённого в точке О к несущему элементу конструкции перпендикулярно к его оси с эксцентриситетом em от центра тяжести массы – точки Om .
В качестве степеней свободы массы могут рассматриваться тангенциальное y1 и нормальное y3 ( относительно продольной оси стержневого элемента ) линейные перемещения точки О при-крепления массы к стержню, а также угол поворота массы y2 .
Перемещению y1 соответствует приложенная в центре мас-сы Om сила J1 – равнодействующая нормальных к оси массы распределённых сил инерции ( рис. 1.43, б ). При гармонических колебаниях ( в частности, в случае собственных колебаний с час-тотой ) сила J1 и перемещение y1 связаны зависимостью
J1 = 2 m y1 . ( 1.130 )
ет инерционный
момент
![]() ,
где
,
где
![]() ,
,
т. е.
 ,
( 1.131
)
,
( 1.131
)
где (z)
– интенсивность распределённой массы;
мент
инерции массы.![]() –
собственный
(
относительно
центра
тяжести Om
) мо-
–
собственный
(
относительно
центра
тяжести Om
) мо-






 Для
стержня с равномерно распределённой
по длине массой
Для
стержня с равномерно распределённой
по длине массой![]()
bm
y2
J3
Om m






m
qin m




y3












y3 m dz





Om
J1
Om
Om z












y1
y1
J2
















O



















y2






![]()
J3 O

















m m
O
J2


![]()
J1


![]()






![]()

![]()
![]()
![]()


![]()


![]()


![]()
Рис. 1.43
И, наконец, линейное перемещение y3 порождает силу J3 – равнодействующую распределённых инерционных сил, направ- ленных вдоль оси массы, которая приложена в центре массы Om
( рис. 1.43, г ) и определяется как J3 = 2 m y3 . ( 1.132 )
Исходный вектор инерционных силовых факторов J = = [ J1 J2 J3 ]т связан с перемещениями y = [ y1 y2 y3 ]т (рис. 1.43, а – г ) соотношением

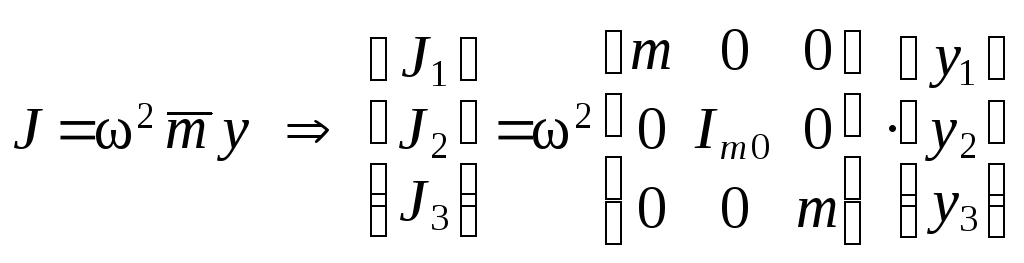 .
( 1.133
)
.
( 1.133
)
![]()
Приведение
силовых факторов J1
,
J2
и
J3
к точке прикреп-ления массы О
даёт группу
сил
и
моментов, схема
которой пред-ставлена
на
рис. 1.43, д,
где
![]() =
em
J1
.
=
em
J1
.
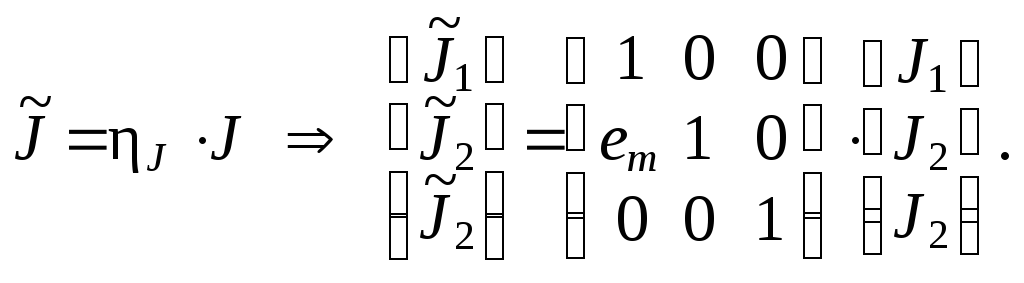
![]() ,
J2
можно ввести новые (
групповые
) инерционные силовые
факторы
,
J2
можно ввести новые (
групповые
) инерционные силовые
факторы
![]() (
рис. 1.43,
е )
, что
в матрич-ной форме представляется как
(
рис. 1.43,
е )
, что
в матрич-ной форме представляется как
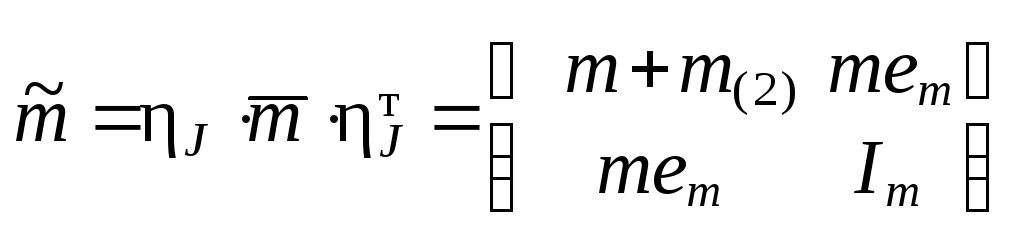
( 1.134 )
J
![]() приведённых масс, соответствующих новым
групповым неизвестным
приведённых масс, соответствующих новым
групповым неизвестным
![]() :
:
( 1.135 )
где Im
=![]() – момент
инерции
массы
относительно
точки
– момент
инерции
массы
относительно
точки
прикрепления О.
Структура
полученной матрицы приведённых масс
свиде-тельствует о том, что силу инерции
![]() =
J3
можно учитывать не-зависимо от
=
J3
можно учитывать не-зависимо от
![]() и
и
![]() ,
используя
,
используя
![]() =
y3
и
=
y3
и
![]() =
m
. Тогда
для
=
m
. Тогда
для
![]() и
и

![]() имеем:
имеем:
( 1.136 )
![]() ,
раскрывается с помощью
преобразования
,
раскрывается с помощью
преобразования
![]()
откуда
![]() (
1.137
)
(
1.137
)
 (
1.138
)
(
1.138
)![]() обратная матрица масс
обратная матрица масс
![]() такова:
такова:
Матрица
![]() используется
также для вычисления переме-щений
используется
также для вычисления переме-щений
![]() по найденным величинам
по найденным величинам
![]() :
:
![]()
Частные случаи:
1) масса прикреплена
к стержню в центре тяжести (![]() )
–
)
–
р
а)![]()
б)
Рис. 1.44
(
1.139
)








2) масса прикреплена к стержню концом ( рис. 1.44, б ):

 em
=
lm
/
2; Im
=
em
=
lm
/
2; Im
=![]()
(
1.140
)![]()
Д о п о л н е н и е
y2
м
y3
m(1)






р
m(2)
y5


ф ормально
считается независимым от
ормально
считается независимым от
п
y1
y4


 еремещения
y1
первой массы, и дина-
еремещения
y1
первой массы, и дина-
м
Рис. 1.45
точной степенью свободы; тогда при
расчёте на собственные колебания в спектре частот появится лишняя частота – теоретически бесконечно большая, а практи-чески ( за счет малых погрешностей вычислений, в том числе компьютерных ) – значительно ( на несколько порядков ) больше других частот; её следует игнорировать;
2) учитывается равенство перемещений y4 и y1, и одно из них ( y1 ) считается одной степенью свободы для обеих масс при их общем смещении в направлении продольной оси стержня; далее сила инерции массы m(2) , соответствующая перемещению y4 = y1 ,
суммируется
с
J1
( см.
рис. 1.43
), и результат
принимается в ка-честве
групповой силы инерции
![]() ;
матрица
приведённых масс, связанная с перемещениями
y1
=
;
матрица
приведённых масс, связанная с перемещениями
y1
=![]() и
y2
=
и
y2
=![]() (
выражающая
через них силу
(
выражающая
через них силу
![]() и инерционный
момент
и инерционный
момент
![]() ),
в этом случае такова:
),
в этом случае такова:
(
1.141
)
(
здесь
![]() ).
).
Если точечных масс на стержне несколько, то вместо m(2) в формулу ( 1.141 ) подставляется сумма масс mточечн .
Изложенная методика позволяет рассматривать и более сложные случаи, когда составляющие группового инерционного фактора имеют разные направления и, возможно, даже отлича-ются по типу – силы и моменты. Например, у четырёх сосредото-
ченных масс рамы, изображённой на рис. 1.46, всего три степе-
ни свободы ( если не учитывать продольные деформации стерж-
ней ), хотя число ком-
п
m(1)
, Im(1)
J1(1)
y1(1)
=
y1(2)
l



м
EI
=
m(2)
y1











![]()
 асс
равно пяти,
в том
асс
равно пяти,
в том
ч
y2
y3



н
m(4)
J3
J1(2)
J1
h







m(3)
J2


м
y1(2)


в
Рис. 1.46




ное перемещение y1(1)
массы m(2)
и угол поворота y1(2)
массы m(1)
можно выразить через линейное
перемещение
y1
массы m(1)
: y1(1)
=
y1
sin
,
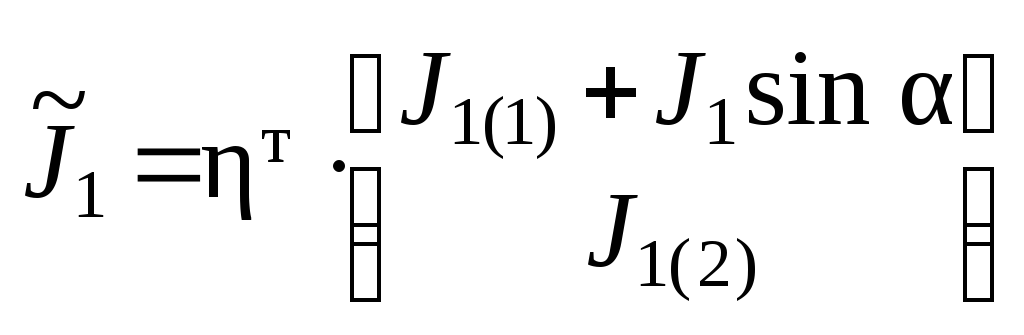
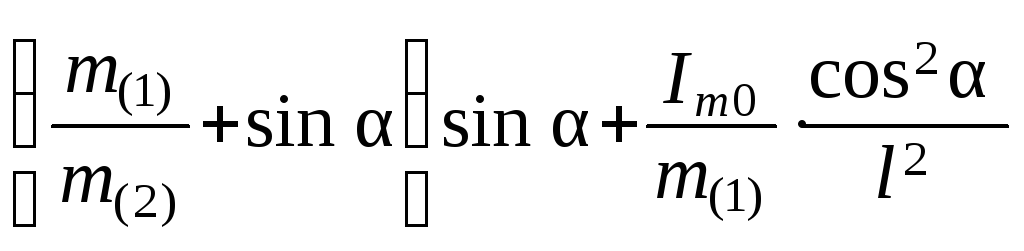
y1(2)![]()
= ( y1 cos ) / l . Приняв y1 за обобщённое перемещение, в матрич-ной записи имеем [ y1(1) y1(2) ]т = y1 = [ sin ( cos ) / l ]т y1 и, на основании ( 1.107 ),

= ( m(1) + m(2) ) sin2 + Im0 ( cos2 ) / l2.
Обобщённая
сила инерции, соответствующая y1,
равна, по (1.108),
 =
(
J1(1)
+
J1
sin
sin
J1(2)
(cos
)/l
=
=
(
J1(1)
+
J1
sin
sin
J1(2)
(cos
)/l
=
=
km
J1
,
где km
=
 .
.![]()
Из закона инерции
( 1.2
) находим,
что J1
:
J1(1)
:
J1(2)
=
1: m(2)
/
m(1)
: : (
Im0
cos
)
/
(
m(1)
l
).
Исходя из
этого, в единичном состоянии при задании
![]() нужно одновременно приложить к раме
силы J1
=
1/
km
,
J1(1)
= m(2)
/
(
km
m(1)
)
и момент
J1(2)
= (
Im0
cos
)
/
(km
m(1)
l
).
нужно одновременно приложить к раме
силы J1
=
1/
km
,
J1(1)
= m(2)
/
(
km
m(1)
)
и момент
J1(2)
= (
Im0
cos
)
/
(km
m(1)
l
).
В системах со сложной геометрией выявление зависимостей между компонентами перемещений масс может вызывать затруднения. В таких случаях можно обойтись без введения групповых неизвестных, пренебрегая взаимозависимостью перемещений, т. е. завышая число степеней свободы масс в сравнении с истинным. Последствия этого обсуждены в конце п. 1.5.4.3, где констатирована безопасность указан-ного приёма.
В качестве примера рассмотрим задачу о собственных колебаниях про-
с
y2
J1
m(2)
m(3)
m(1)
J2(1)
J2(3)

l/2
EI2
y1




























J2(2)
EI1
EI1
l/2

h/2
h/2
h/2


M1
M2





Рис. 1.47
Уравнения собственных колебаний в амплитудах сил инерции:
![]()
![]()

частоты:
1=min
=![]() и
2
=
и
2
=![]() .
.![]() .
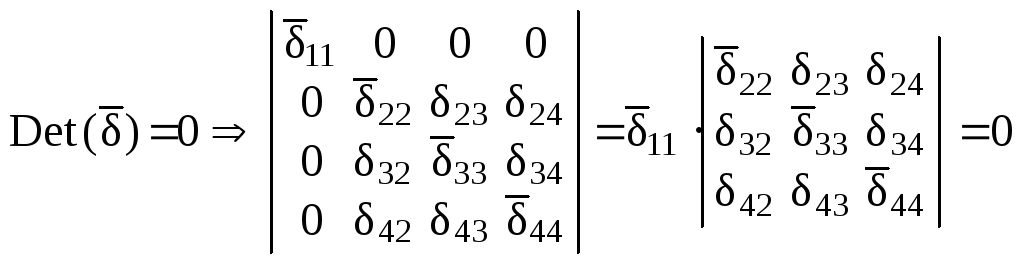
С учётом того, что
12
= 21
= 0
(так
как эпюра
M1
симметричная, а
M2
обратносимметричная
),
это уравнение принима-ет вид
.
С учётом того, что
12
= 21
= 0
(так
как эпюра
M1
симметричная, а
M2
обратносимметричная
),
это уравнение принима-ет вид
![]() ,
откуда
,
откуда
![]() и
и
![]() –
из
этих
условий
находятся
две
–
из
этих
условий
находятся
две
Если
игнорировать взаимозависимость
перемещений масс, то дополни-тельно к
y1 и
y2 степенями
свободы
формально
будут горизонтальные переме-щения
средней и правой массы – соответственно
y3
и
y4
,
то
есть
n
= 4
.
В
этом случае за J2
принимается
сила инерции
J2(1)
левой
массы, а
силы J2(2)
и
J2(3)
рассматриваются
как
J3
и
J4
;
матрица масс
m = diag
[ m(2)
m(1) m(2)
m(3) ].
Эпюры
моментов
M3
и
M4 от
единичных
J3
и
J4
совпадают
с
M2
,
вследствие
чего
22
= 33
= 44
= 23
= 24
= 34
;
12
= 21
= 13
= 31=
14
= 41
= 0.
Уравнение
частот:
 ,
,
откуда
 ( * )
( * )
где = 1/(m(1)2 22); B3 = m(1) / m(2) ; B4 = m(1) / m(3) .
Первое
из уравнений ( * ) позволяет сразу
определить одну из частот (вторую): 2
=![]() ,
а
второе
приводится
к виду
,
а
второе
приводится
к виду
[ B3
+
B4 +
B3
B4 (
1 –
) ]![]() =
0
=
0
и
даёт 1=
1 +
![]() ,
а также 3,
4 =
,
а также 3,
4 =![]() .
Соответствующие
частоты: 1=min
=
.
Соответствующие
частоты: 1=min
=![]() ;
3
= 4
=
;
3
= 4
=![]() .
.
Из найденных таким способом частот две первые – такие же, как в основ-ном решении, а две бесконечно большие – побочный результат, являющийся следствием формального завышения числа степеней свободы масс.
![]()
![]()
![]()
![]()
![]()





![]()
![]()
![]()
системы число степеней свободы масс n = 6.
П
m(2)
m(1)
m(1)

 риняв
m(1)
= m(3)
риняв
m(1)
= m(3)














![]()
![]()
и
EI2
EI1
EI1
EA1
EA2
с
EA1
то, что в вышеупомянутом МКЭ расчёт выпол-
н
Рис.
1.48
основных неизвестных амплитуды групповых
инерционных сил ( симметричных и обратносимметричных ), чтобы иметь воз-можность сопоставления с предыдущими результатами.
Для удобства номера с 1 до 3 присвоены симметричным неизвестным,
а с 4 до 6 – обратносимметричным. На рис. 1.49 показаны единичные состояния системы, где эпюры изгибающих моментов совмещены со схемой рамы.
![]()
![]()
![]()
Nр1=
–
H1



![]()
![]()
H1h

Nр2=
0
Nр3=
–
1
















![]()
![]()
1/2
1/2
H1
1
1
1
1
Nр5=
0
1/2
1/2
Nрl,4=
1/2
h/2
h/l
h/l
2h/l
2h/l
1
1
Nр6=
0




















![]()

![]()

![]()










![]()

![]()
![]()



![]()



















![]()
![]()













![]()
![]()





![]()

H1


h
h


Nрr,4=
–1/2

Рис. 1.49
Для
определения шести частот собственных
колебаний служат два неза-висимых
частотных уравнения
![]() и
и
![]() –
из
первого
на-
–
из
первого
на-
ходятся частоты трёх симметричных главных форм, а из второго – трёх обратно-
симметричных. Групповые единичные перемещения – компоненты матриц упру-
гой
податливости![]() и
и![]() вычисляем
методом Максвелла
–
Мора
с учётом
из-гиба
и продольных деформаций стержней рамы.
Эпюра моментов
вычисляем
методом Максвелла
–
Мора
с учётом
из-гиба
и продольных деформаций стержней рамы.
Эпюра моментов
![]() (
рис.
1.49
)
совпадает с M1
на рис.
1.47,
а
(
рис.
1.49
)
совпадает с M1
на рис.
1.47,
а
![]() – с
M2 ;
– с
M2 ;
![]() .
Учитывая
это и исполь-
.
Учитывая
это и исполь-
зуя обозначения перемещений 11 и 22 из предыдущей задачи, имеем:
![]()
![]()
![]()
![]()
![]()
![]() Обозначив
h
/ (EA1)
= 1
, l
/ (EA2)
= 2
,
Обозначив
h
/ (EA1)
= 1
, l
/ (EA2)
= 2
,
получаем
![]()
![]()
![]()
![]()
![]()
![]()
Заметим,
что 1
![]() 2
<< 11
2
<< 11![]() 22
.
Для получения количественных оценок
22
.
Для получения количественных оценок
примем h = l , EA1 = EA2 , EI1 = EI2 , тогда 1 = 2 = ; H1 = 3/40; 11 = = (11/240) 22 ; 22 = (1/4) l3 / EI .
 Уравнения
частот собственных колебаний:
Уравнения
частот собственных колебаний:
()
Умножив
каждый из определителей на
![]() и введя собственное число
= = 2 /
(22
m(1)
2)
= 8EI/
(m(1)
l2),
представляем уравнения в следующем
виде:
и введя собственное число
= = 2 /
(22
m(1)
2)
= 8EI/
(m(1)
l2),
представляем уравнения в следующем
виде:
где a1 = m(2) / m(1) ; = / 22 = 4EI / (l2EA) = 4(i / l) 2 – здесь i – радиус инерции
сечения.
Численные результаты получим при m(2) = 2 m(1) и i / l = 0,04*) :
(
♠ )
![]() ,
,
![]() .
.
* )
Такое
значение
i
/
l
соответствует
элементам из прокатных двутавров, для
которых i
)
Такое
значение
i
/
l
соответствует
элементам из прокатных двутавров, для
которых i![]()
( hc – высота сечения), при hc = l /10.
Корни первого частотного уравнения: s1 = 0,19717; s2 = 0,01191; s3 = 0,00639; второго – as1 = 8,10576; as2 = 0,01264; as3 = 0,00320.
В порядке убывания собственные числа образуют последовательность as1, s1, as2, s2 , s3, as3 ; ей соответствует спектр частот собственных коле-баний 1 : 2 : 3 : 4 : 5 : 6 = 1 : 6,41 : 25,32 : 26,09 : 35,62 : 50,33, где
1 = 0,9935![]() .
Это решение следует рассматривать
как
уточнённое.
.
Это решение следует рассматривать
как
уточнённое.
Собственные векторы действительных ( негрупповых ) перемещений:
y(1) = [ 0 0 0 1 0,0063 0,9992 ] т ; y(2) = [ 1 – 0,0694 0,0050 0 0 0 ] т ; y(3) = [ 0 0 0 – 0,0042 1 – 0,0021 ] т ; y(4) = [ 0,0695 1 0,0121 0 0 0 ] т ;
y(5) = [ – 0,0058 – 0,0117 1 0 0 0 ] т ; y(6) = [ 0 0 0 – 0,9992 – 0,0107 1 ] т .
1
с
1



















о бладают
деформации изгиба
стер-
бладают
деформации изгиба
стер-
ж
1
2
 ней
при
очень
небольших их
удли-
ней
при
очень
небольших их
удли-
нениях / укорочениях. Остальным ча-
стотам 3 ... 6 отвечают формы с
д
1
1
1
1
1
1
1











1















1
































5
6
3
4



























Рис. 1.50
тием элементов. Правда, и в них присутствует изгиб, но с перемещениями того же порядка, что и абсолютные продольные деформации стоек и ригеля.
Обратим внимание на 6-ю главную форму – в ней крайние массы движутся по горизонтали в направлении, противоположном перемещению средней массы.
Частоты трёх главных форм, мало отличающихся по деформациям от 2-го, 3-го и 5-го состояний на рис. 1.49 ( с преобладанием продольных деформаций элементов ), с удовлетворительной точностью могут быть найдены из частотных уравнений с компонентами матрицы упругой податливости, отражающими толь-ко деформации растяжения / сжатия стержней – они получаются из () исключе-
нием столбцов и строк, содержащих 22 ( перемещение, обусловленное изгибом ):
![]()
откуда s(N), 1 = 0,0128 ; s(N), 2 = 0,0064 ; as(N) = 0,0128 ( ср. с s2 , s3 и as2 ).
Если
продольные деформации стержней не
учитывать (
т.е.
вернуться к схеме по рис. 1.47,
б – формально это означает задание EA
=![]() ),
то
= 0,
и
уравнения
(
♠ )
принимают
вид
),
то
= 0,
и
уравнения
(
♠ )
принимают
вид
![]()
![]()
или 2 (0,045833 – 0,25 ) = 0 и – 0,25 [(4 – )2 – 16 ] = 0 – их корнями являются s1 = 0,18333; s2 = s3 = 0; as1 = 8; as2 = as3 = 0. Сравнение с
полученным выше более точным результатом показывает, что минимальная частота ( для обратносимметричной главной формы ) без удлинений / укорочений стержней опре-деляется с погрешностью 0,66 % , а частота второй ( симметричной ) изгибной формы колебаний – с завышением на 3,7 %. Четырём нулевым собственным значениям отве-чают четыре бесконечно большие ( фиктивные ) частоты.
Рассмотренная модельная задача служит иллюстрацией к выводу, который следует иметь в виду при выполнении практических динамических расчётов:
в
 лияние
продольных
деформаций
в системах с преобладающим изгибом
элементов (
как
стержневых, так и пластинчато-оболочечных
)
сказывается
в
большей степени на высокочастотных
параметрах
динамического процесса – частотах
обертонов
собственных колебаний или характе-ристиках
НДС при высокочастотных
воздействиях на сооружение или
конструкцию.
лияние
продольных
деформаций
в системах с преобладающим изгибом
элементов (
как
стержневых, так и пластинчато-оболочечных
)
сказывается
в
большей степени на высокочастотных
параметрах
динамического процесса – частотах
обертонов
собственных колебаний или характе-ристиках
НДС при высокочастотных
воздействиях на сооружение или
конструкцию.
Отметим, что аналогично, и даже значительнее, на динамические свойст-ва и поведение системы влияют деформации сдвига*). Поэтому для повышения точности результатов динамического расчёта необходимо при определении характеристик жёсткости и / или податливости системы ( матриц r и ) использо-вать наряду с жёсткостями сечений элементов при растяжении / сжатии EAj так-
же
и сдвиговые
жёсткости
GAj
/k
j
(
либо
приведённые жёсткости
![]() при
попе-
при
попе-
речном изгибе ).