

1.7. О приближённом определении частот
собственных колебаний
В динамических расчётах сооружений и конструкций бы- вает полезной упрощённая приближённая оценка частот собст-венных колебаний, в первую очередь – минимальной. Это нуж-но и для ориентировочного прогноза опасности резонанса, и для выбора диапазона поиска в итерационных процедурах определе-ния собственных частот, и для оценки достоверности результа-

*) Напомним, что учёт сдвига не изменяет числа степеней свободы масс.
тов полного, в том числе компьютерного, расчёта.
В основных способах приближённого вычисления частот собственных колебаний используются:
– априорное описание главной формы, для которой нужно дать оценку частоты колебаний;
– некоторые математические свойства задачи о собственных зна-чениях матриц динамической податливости и жёсткости системы;
– энергетический метод.
В первом случае, исходя из тех или иных качественных со-ображений, аналогий или экспериментальных данных, ожидае-мая форма колебаний приближённо описывается задаваемым
собственным вектором перемещений масс y = [ y1 y2 … yn ]т , где некоторый компонент yi принимается равным 1, а осталь-
ным приписываются конкретные числовые значения, при кото-рых отклонения масс и соответствующие деформации системы с возможно большей достоверностью «напоминают» ожидаемую главную форму. Задание, хотя и приближённое, собственного
вектора y формально означает, что перемещение yi определяет все перемещения y = y yi, т. е. система может рассматриваться как имеющая одну степень свободы масс.
Если матрица
масс
![]() диагональная,
то i-е
уравнение
диагональная,
то i-е
уравнение
![]() из табл. 1.5 после деления на
из табл. 1.5 после деления на
![]() принимает вид
принимает вид
![]() –
1
=
0, откуда
–
1
=
0, откуда
 .
( 1.142
)
.
( 1.142
)
Симметричная балка с защемлёнными концами имеет гла-вную форму колебаний с минимальной частотой, изображённую на рис. 1.51. Её можно приближённо описать уравнением проги-
б
2m
л m m
y1
y2
y3


4
l
/4
l
/4
l
/4
l
/4














 -й степени: y(x)
=
-й степени: y(x)
=
![]()
тогда y1
= y3![]() и y
=
и y
=![]() Рис. 1.51
Рис. 1.51
Вычислив обычным путём единичные перемещения 21 = 23 =
= l3/( 384 EI ) и 22 = l3/( 192 EI ), из ( 1.142 ) находим
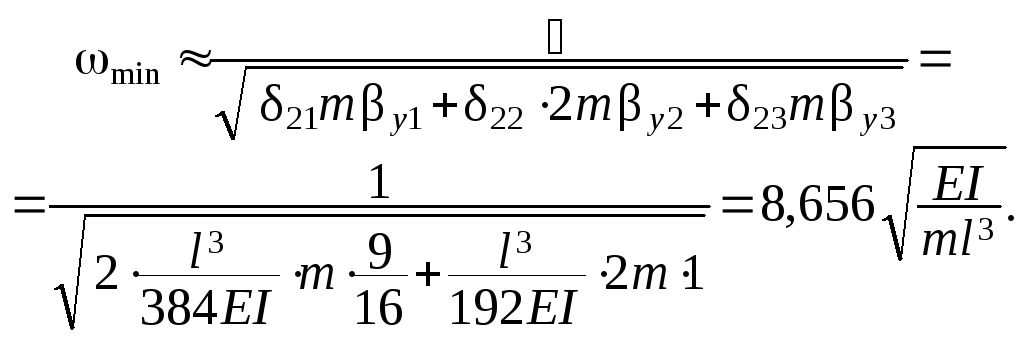
Точное
значение
![]() –
расхождение 0,72
%.
–
расхождение 0,72
%.
mn
(
Jn
J1
yn





























н
mi а
уровне ригелей
рамы
и учиты-
а
уровне ригелей
рамы
и учиты-
в
Ji ая
то, что
их перемещения
зависят
ая
то, что
их перемещения
зависят
п
yi

з
J2
г
y2

деформаций рамы предполагаем
с
 илы
инерции (
пропорциональные
илы
инерции (
пропорциональные
массам и перемещениям ) зависящи-
ми от номера этажа i как
Ji = Jn [ 1 – ( 1 – i/n )2 ] mi / mn .
При n = 4 и одинаковых мас- Рис. 1.52
сах имеем J1 = 0,438 Jn , J2 = 0,75 Jn ,
J3 = 0,938 Jn , J4 = Jn . Рассчитав раму на эти силы как одновремен-
но приложенные нагрузки ( при любом значении Jn , например, Jn = 1 ), находим вызванные ими перемещения y1 , …, yi , …, yn и затем – вектор y = [ y1 / yi y2 / yi … 1 … yn / yi ]т. Одновременно с ука-занным расчётом в матричной форме можно рассмотреть также воздействие Ji = 1 для определения единичных перемещений ik = ki ( k = 1, 2, …, n ). Далее – вычисление min по ( 1.142 ).
Аналогичными по смыслу являются различные варианты приёмов преобразования и замены масс1.
1 Киселёв В.
А. Строительная
механика.
Специальный
курс.
Динамика и
устойчивость сооружений : учеб. для
вузов / В. А. Киселёв. – 3-е изд., испр. и
доп.– М.: Стройиздат, 1980. – 616 с.
Киселёв В.
А. Строительная
механика.
Специальный
курс.
Динамика и
устойчивость сооружений : учеб. для
вузов / В. А. Киселёв. – 3-е изд., испр. и
доп.– М.: Стройиздат, 1980. – 616 с.
Ко второму способу приближённого определения мини-мальной частоты относится формула Донкерлея ( Doncerlay ):
![]() (
1.143
)
(
1.143
)
г
мы
с
одной
массой
mi
,
совершающей
движе-
ние по i-й
степени свободы.
![]() – парциальная
частота, определяемая
для систе-
– парциальная
частота, определяемая
для систе-
Вывод формулы ( 1.143 ) на основе анализа свойств частот собственных колебаний дан в 2 .
Иная форма записи ( 1.143 ):
 (
1.144
)
(
1.144
)
Для балки по рис.1.51: 11 = 33 = 9l3/( 4096 EI );
 –
–
погрешность 5,75 %.
Непосредственное практическое применение в динамичес-ких расчётах систем с сосредоточенными массами способов, ре-ализующих энергетический метод, сопряжено с зачастую неоп-равданными математическими трудностями. Современная об-ласть использования энергетического метода в динамике – по-строение теоретических решений новых задач, в том числе в нелинейных постановках, а в прикладном плане – развитие метода конечных элементов ( расширение спектра КЭ, новые расчётные модели ).

2 Филин А. П. Прикладная механика деформируемого твёрдого тела. Сопротивление материалов с элементами теории сплошных сред и стро-ительной механики. Т. 3 / А. П. Филин. – М.: Наука. Гл. ред. физ.-мат. литературы, 1981. – 481 с.