

1.5.4.4. Расчёт на собственные колебания
по уравнениям в форме метода перемещений
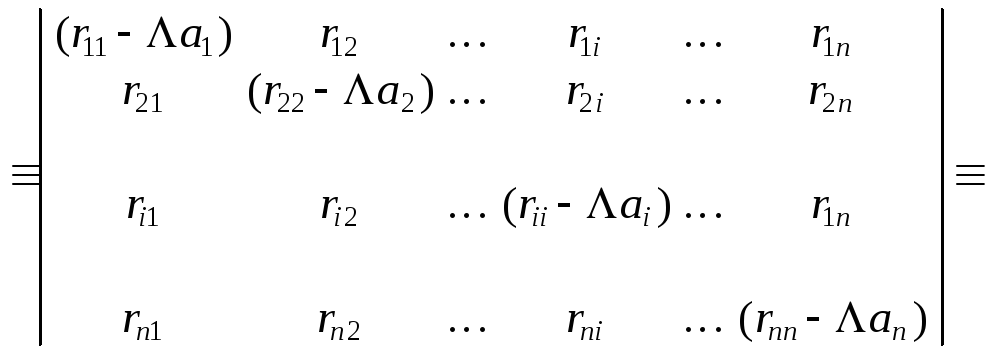
Уравнения ( 1.49 ) в амплитудах перемещений масс и с мат-рицей жёсткости системы в матричной форме записываются как
. . . . . . . . . . . . . . .
. . . . .
. . . . . . . . . . . . . . .
. . . . .

где
![]() –
матрица
динамической жёсткости
заданной
системы
–
матрица
динамической жёсткости
заданной
системы
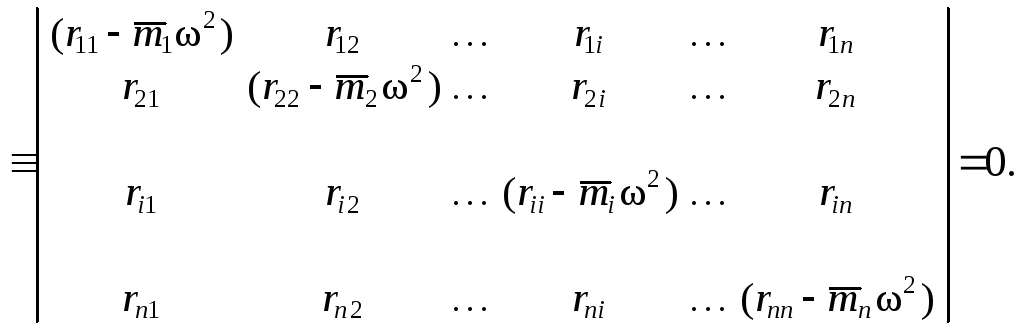
по направлениям степеней свободы масс при собственных
колебаниях с частотой :
![]() r
–
m0
2 a
r
–
m0
2 a
![]() r
–
a
;
( 1.66
)
r
–
a
;
( 1.66
)
a – то же, что в формуле ( 1.52 ); = m0 2 ( для краткости ис-пользовано обозначение для величины, названной 0 на с. 14 ).
Матрица единичных реакций r ( внешней жёсткости по на- правлениям степеней свободы масс ) может вычисляться как об-
ратная матрице податливости, т. е. r = –1, либо от единичных
смещений
yi
=
1
![]() связей,
наложенных на массы по напра-
связей,
наложенных на массы по напра-
влениям их возможных перемещений ( см. рис. 1.19 ).
Н

Определение
числа
степеней
свободы
масс
n
Число
n
можно определять как минима-льно
возможное число простых связей (
линейных
и угловых
),
которые нужно наложить на массы системы,
чтобы устранить их возможные перемещения.

Выбор основных
неизвестных
J
и формирование
расчетной схемы
На
расчетной схеме обозначаются амп-литуды
перемещений масс и сил инер-ции.

Запись канонических
уравнений
J
= 0 в символьной форме
Число
уравнений – n;
в диагональных компонентах (
1.53
)
матрицы
следует раскрыть смысл величин mi.

Рассмотрение
единичных состояний заданной
системы
при Ji
=1,
i
=1,…,n,
с определением силовых факторов
Si
, необходимых для вычисления
компонентов матрицы
Для
расчета статически неопредели-мой
системы на единичные воздейст-вия Ji
=1,
которые рассматриваются как варианты
загружения, выбирается ра-циональный
метод – сил, перемещений или смешанный.
Целесообразно
использование ЭВМ.





Вычисление
единичных перемеще-
ний ik
и
формирование из них
матрицы упругой
податливости
заданной системы
Перемещения
в заданной системе мо-гут определяться
методом Максвелла
–
Мора
(
или
любым
другим
)
в
обычной
(
«перемножением»
эпюр
)
или матрич-ной форме, аналитически или
числен-но, в том числе с помощью ЭВМ.
Получение
уравнения частот
Det
()
= 0, отыскание его корней j
(
j
=
1,...,
n
),
определение спектра
частот собственных
колебаний j
(
j
= 1,
...,
n
)

Нахождение
корней частотного уравне-ния и
собственных векторов может выполняться
либо прямым решением уравнения n-го
порядка с последующим использованием
уравнений (
1.56
)
и за-висимостей (
1.58
),
либо на ЭВМ по специализированным
программам или ППП линейной алгебры.


Вычисление
собственных векторов
J(j)
и y(j)
для всех главных форм
колебаний (
j
=
1,
...,
n
)

Проверки
ортогональности
главных
форм по (1.60
) Не
выпол-
Не
выпол-
няются
При
необходимости уточнения схемы деформаций
в какой-либо главной форме определяется
нужное число перемещений разных точек
системы от воздействий Ji
= Ji
Jk
( i
=
1, ..., n
).

Изображение схем
деформаций си-
стемы в главных
формах колебаний
Качественная
оценка
правдоподобия
полученных
главных форм

 Обнаружены
Обнаружены

 противоречия
противоречия
главных форм
Формы
правдоподобны
 заданной
системы отрицательный
заданной
системы отрицательный
Вычисление
динамических
силовых факторов
по ( 1.64
)
Статическая
и кинематическая
проверки
– с.
59,
ф-ла (
1.63
)


К
Результат
положительный

Рис. 1.25
Матрица
![]() как обобщённая характеристика динамических
свойств системы играет в данном варианте
расчёта ( в
форме ме-тода
перемещений
)
ту
же
роль,
что
матрица
податливости
как обобщённая характеристика динамических
свойств системы играет в данном варианте
расчёта ( в
форме ме-тода
перемещений
)
ту
же
роль,
что
матрица
податливости
![]() в расчёте в форме метода сил
(
см.
с.
54
). Диагональные
компонен-ты матрицы
в расчёте в форме метода сил
(
см.
с.
54
). Диагональные
компонен-ты матрицы
![]() содержат динамические поправки:
содержат динамические поправки:
![]() =
rii
–
=
rii
–![]()
2
2
![]() rii
–
ai
.
( 1.67
)
rii
–
ai
.
( 1.67
)
Умножением
на
a
–1
уравнения
(
1.65
) приводятся
к
виду B
–![]() =
0, т. е.
к
стандартной
задаче о собственных значениях
=
0, т. е.
к
стандартной
задаче о собственных значениях
матрицы
B
=![]() математически
решаемой
так
же,
как
в
рас-
математически
решаемой
так
же,
как
в
рас-
смотренном ранее
варианте с матрицей![]() и
неизвестными J:
не-тривиальное решение при y
0 (
условие
существования колеба-ний
) даёт
характеристическое (
частотное
) уравнение:
и
неизвестными J:
не-тривиальное решение при y
0 (
условие
существования колеба-ний
) даёт
характеристическое (
частотное
) уравнение:
Det![]() Det
(
r
–
a
)
Det
(
r
–
a
)![]()
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . .
Найденные
корни уравнения ( 1.68 ) 1
, 2
,
…, j
,
…,
n
используются
для вычисления собственных частот j
=![]() (
j
=
1,
2,
...,
n
).
(
j
=
1,
2,
...,
n
).
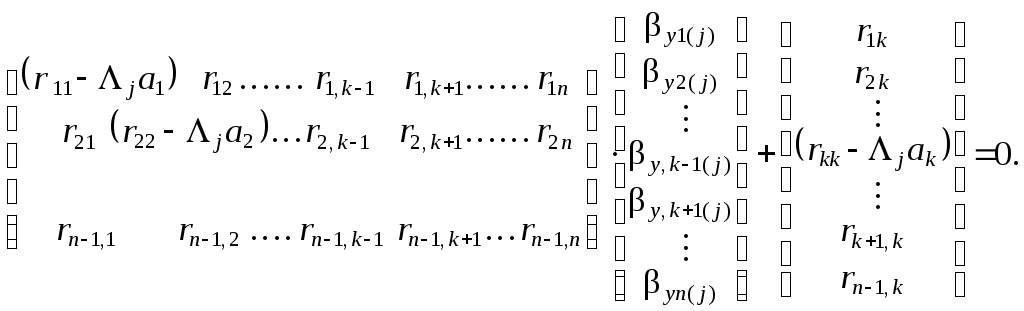
Далее для
каждого значения частоты j
определяется соответствующий собственный
вектор основных неизвестных y(
j
)
=
![]() –
решением редуцированной системы
уравнений
–
решением редуцированной системы
уравнений
![]() y(j),
red
+
y(j),
red
+
![]() =
0 (
1.69
)
=
0 (
1.69
)
и



![]()
![]()
![]()
(1.69*)
По вектору y( j ) вычисляется собственный вектор инерци-онных сил y(j) = a J(j) , ( 1.70 )
после чего заключительный этап – проверка результатов расчё-та – выполняется по методике, изложенной на с. 59 – 60.
Весь расчёт на собственные колебания по уравнениям в форме метода перемещений производится по тому же алгоритму, что и в варианте в форме метода сил ( рис. 1.25 ) – следует лишь заменить в нём J на y, на r.
Для компьютерной реализации, в том числе в форме мето-да конечных элементов, наиболее приспособлен подход, осно-ванный на формировании уравнений динамики для расчётной модели, по смыслу представляющей собой основную систему классического метода перемещений ( ОСМП ), где в качестве основных неизвестных Z принимаются перемещения расчётных узлов ( в динамической задаче о собственных колебаниях Z – амплитуды перемещений ). В этом подходе особенностью ОСМП в динамике является то, что кроме расчётных узлов, назначае-мых по правилам метода перемещений, использовавшимся ранее для случаев статических воздействий, в число расчётных узлов включаются также точки расположения масс. При этом часть
основных неизвестных
Z
– суть перемещения масс
yi
(
![]() )
по
)
по
направлениям их степеней свободы. Полный вектор перемеще-
ний Z
представляется
состоящим из
двух частей:
Z
=
[![]()
![]() ]
т
,
]
т
,
где Zm![]() у
– вектор амплитуд компонентов перемещений
масс; Zd
– вектор перемещений, не являющихся
степенями свободы масс. Число компонентов
вектора Zm
= у
равно n,
количество пе-ремещений Zd
обозначим nd
, тогда
общее число неизвестных Z
будет n0
=
n
+
nd
. Система
статических
уравнений
метода
пере-мещений
R0,
i
=
0 (
у
– вектор амплитуд компонентов перемещений
масс; Zd
– вектор перемещений, не являющихся
степенями свободы масс. Число компонентов
вектора Zm
= у
равно n,
количество пе-ремещений Zd
обозначим nd
, тогда
общее число неизвестных Z
будет n0
=
n
+
nd
. Система
статических
уравнений
метода
пере-мещений
R0,
i
=
0 (
![]() )
состоит из двух групп, выражающих:
)
состоит из двух групп, выражающих:
1
dk
Ji
+1
R0,
dk

 )
отрицание полных
реакций допол-
)
отрицание полных
реакций допол-
н
Ji



ч
i
+1
i
R0,
i











н
 епосредственно
воспринимающих в
епосредственно
воспринимающих в
О
R0,
i
+1



J
Рис. 1.26![]() ):
R0,
i
=
R0,
iZ
+
R0,
iJ
=
):
R0,
i
=
R0,
iZ
+
R0,
iJ
=![]()
=![]() ;
( 1.71
)
;
( 1.71
)
2) отрицание полных реакций всех остальных дополнительных связей в расчётных узлах:
R0,
i
=
R0,
iZ
=![]() ( 1.72
)
( 1.72
)
Система канонических уравнений в матричной форме:
 (
1.73
)
(
1.73
)
где
![]() –
матрица
динамической
жёсткости
выбранной
основной
–
матрица
динамической
жёсткости
выбранной
основной
системы метода перемещений;
r0, yy – матрица реакций дополнительных связей в ОСМП по
направлениям степеней свободы масс, от их единичных
смещений
(
от Zmi
= 1,
![]() );
);
r0, yd – матрица реакций дополнительных связей в ОСМП по
направлениям степеней свободы масс, от единичных
смещений других связей по направлениям, не совпада-
ющим со
степенями свободы масс (
от Zdk
= 1,
![]() );
);
r0, dy – матрица реакций связей в расчётных узлах ОСМП по
направлениям, не совпадающим со степенями свободы
масс, от единичных смещений связей по направлениям
степеней
свободы масс
(
от Zmi
=
1,
![]() );
r0,
dy
=
);
r0,
dy
=
![]() .
.
r0, dy – матрица реакций связей в расчётных узлах ОСМП по
направлениям, не совпадающим со степенями свободы
![]() – матрица (
n
x
n
) приведённых
масс.
– матрица (
n
x
n
) приведённых
масс.![]() );
);
Если ввести в рассмотрение расширенную матрицу масс
![]()
![]() (
1.74
)
(
1.74
)
г
темы МП
по
направлениям
всех неизвест-
ных Z
=
[
![]()
![]() ]
т .
]
т .![]() –
матрица внешней жёсткости основной
сис-
–
матрица внешней жёсткости основной
сис-
Вычисление r0 возможно любыми известными способами – статическими и кинематическими, в том числе через матрицу внутренней жесткости K0 по формуле r0 = aeт K0 ae ( здесь аe – матрица смещений узлов элементов ОСМП, в собственных ло-кальных осях, от единичных основных неизвестных Z; K0 – блоч-ная диагональная матрица, формируемая из стандартных матриц жёсткости для элементов определённых типов ).
Вводя, как обычно, в рассмотрение собственное число = m0 2 , представляем уравнения ( 1.74 ) в виде
![]()
![]()
где
Частотное уравнение получается как результат постанов-ки условия существования колебаний Z 0 – нетривиальное ре-шение однородной системы ( 1.74 ):
![]() (
1.76
)
(
1.76
)
Независимо от общего числа n0 перемещений Z порядок алгебраического характеристического уравнения ( 1.76 ) равен числу степеней свободы масс n , так как собственное число ,
связанное с частотой
,
присутствует только в блоке
![]() (
n
x
n
)
(
n
x
n
)
матрицы![]() .
.
Из
уравнений
(
1.73
)
формально
математическим
путём мо-гут
быть получены
уравнения
собственных
колебаний (
1.65
), т.
е.![]() из
табл.
1.5,
относящиеся
не к
ОСМП, а
к заданной
систе-ме. Это можно
истолковывать как применение
кинематически
неопределимой основной системы
с расчётными узлами только в точках
расположения масс и с неполным их
закреплением – лишь связями по
направлениям независимых возможных
пере-мещений масс, т.
е. с расчётной
моделью по рис. 1.20 (
при
от-сутствии
заданных
воздействий
).
Для
указанного
преобразова-ния
из второй
группы
уравнений (
1.73
)
неизвестные
Zd
вы-ражаются через главные неизвестные
–
перемещения
масс y
:
из
табл.
1.5,
относящиеся
не к
ОСМП, а
к заданной
систе-ме. Это можно
истолковывать как применение
кинематически
неопределимой основной системы
с расчётными узлами только в точках
расположения масс и с неполным их
закреплением – лишь связями по
направлениям независимых возможных
пере-мещений масс, т.
е. с расчётной
моделью по рис. 1.20 (
при
от-сутствии
заданных
воздействий
).
Для
указанного
преобразова-ния
из второй
группы
уравнений (
1.73
)
неизвестные
Zd
вы-ражаются через главные неизвестные
–
перемещения
масс y
:
Zd
=
–![]() Подстановка этого выражения в первую
груп-пу
уравнений
(
1.73
)
даёт
систему
Подстановка этого выражения в первую
груп-пу
уравнений
(
1.73
)
даёт
систему
![]() из
из
которой следует формула для вычисления матрицы динами-ческой жёсткости заданной системы:
![]() (
1.77
)
(
1.77
)
с переходом к
уравнению частот
собственных
колебаний
![]()