

2.2. Декомпозиция задачи СПС
Одним из важных свойств систем поддержки принятия решений, как и всех автоматизированных систем, является «открытость». Она состоит в возможности подключения дополнительного оборудования и организации его работы в составе системы. Это свойство определяет способность системы к расширению функций, к модернизации, к дальнейшей автоматизации процессов в той или в другой предметной области. Открытость системы обеспечивается единой дискретной основой ее частей, стандартизацией оборудования, структуризацией (модульным построением) аппаратного, информационного, программного обеспечения и рядом других мер.
Структуризация прикладного программного обеспечения состоит в выделении блоков, модулей, процедур, которые могут применяться как отдельно при решении простых вопросов, так и совместно при выполнении сложных задач. Деление этого обеспечения на автономные части основывается на декомпозиции решаемой системой задачи, т.е.
представлением ее совокупностью упрощенных задач. При выполнении этой операции вначале исходная задача системы делится на несколько основных, по возможности самостоятельных задач (задач первого уровня). Затем каждая из основных задач представляется более простыми задачами второго уровня. Последние также делятся. Этот процесс продолжается до тех пор, пока не исчезнет в нем смысла.
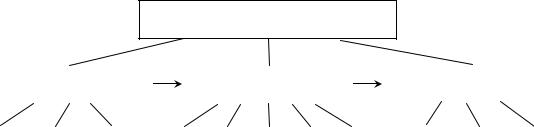
Два уровня одного из вариантов декомпозиции задачи бортовой СПС показаны на рис. 2.1.
Задача избежания столкновений
Выявление угрозы |
|
|
|
|
Идентификация |
|
|
Определение стратегии |
||||||||||||||||
|
столкновений |
|
|
|
|
опасной ситуации |
|
|
|
расхождения |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формирование ограничений |
|
Контроль движения «целей» |
|
Обнаружение опасной «цели» и определение степени риска |
|
|
Классификация «целей» |
|
|
Оценка вида ситуации по геометрии сближения |
|
Определение участка заблаговременных мер |
|
Оценка вида «цели» по влиянию на выбор маневра |
|
Представление информации оператору |
|
|
Формирование критерия эффективности |
|
Определение множества допустимых стратегий |
|
Поиск и представление эффективной стратегии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.1. Декомпозиция задачи СПС
33
Модули второго уровня могут быть представлены более мелкими процедурами.
Первая группа задач второго уровня включает три задачи. Формирование ограничений состоит в определении областей (см.
параграф 1.2):
−наблюдения;
−охранной;
−запретной;
−взаимных обязанностей судов;
−движения и маневров.
Впростейшем варианте зона наблюдения, охранная и запретная акватории считаются круговыми с центром в месте собственного судна. Контур первой области соответствует номиналу используемой шкалы дальности. Вторая зона задается значением охранной дистанции и служит для выработки предупреждений о появлении объектов, требующих повышенного внимания. Границы запретной зоны определяются допустимым
расстоянием ( d s ) кратчайшего сближения.
Пространство взаимных обязанностей судов характеризуется пределом
времени (ts ) до момента кратчайшего их сближения.
Область движения и маневров является безопасной в навигационном отношении акваторией, границы которой не будут пересекаться судном при выполнении маневра расхождения.
В СПСI, СПСII решение рассматриваемой задачи не предусматривается. Границы названных областей определяются оператором и вносятся в память системы. В СПСIII характеризуемые ограничения формируются экспертной системой в зависимости от условий плавания и выдаются оператору для коррекции и утверждения.
Контроль движения «целей» состоит в их обнаружении, мониторинге положения и элементов движения, в выявлении и выделении маневрирующих судов.
Обнаружение опасной «цели» и определение степени риска
заключается в прогнозе перемещения «целей» и собственного судна, в установлении наличия угрозы столкновения и степени риска.
Вторая группа задач в полном объеме решается в СПСIII с помощью экспертной системы. В системах низших поколений эти задачи представлены частично.
Классификация «целей» состоит в выделении опасных, потенциально опасных, лимитирующих маневры, безопасных судов, а также самой опасной (главной) «цели».
Оценка вида ситуации заключается в ее идентификации по геометрии сближения судов (обгон, пересечение курсов, прямо или почти прямо друг на друга; впереди траверза, на траверзе, позади траверза).
Определение участка заблаговременных мер состоит в выделении на линии пути судна оператора отрезка, на котором его действия по отношению
34
к главной «цели» с большой вероятностью будут считаться заблаговременными, но не преждевременными.
Оценка вида «цели» по влиянию на выбор маневра СО состоит в установлении, что «цель» определяет (является главной) либо не определяет меры по предупреждению столкновения.
В первом случае выделяются виды главных «целей», по отношению к которым судно оператора:
−не находится еще на участке заблаговременных мер, но будет обязано на нем сохранять курс и скорость;
−не находится еще на участке заблаговременных мер, но должно будет на нем предпринять маневр расхождения;
−находится на участке заблаговременных мер и обязано сохранять K и V ;
−находится на участке заблаговременных мер и должно предпринять маневр расхождения.
Представление информации оператору включает ее агрегирование
(фильтрацию, объединение, сжатие) для возможности создания адекватного, наглядного образа обстановки и в отображении обобщенных данных в виде, облегчающем понимание ситуации и выбор действий по расхождению.
Третья группа задач решается только в СПСIII. Без базы знаний они не могут быть выполнены на требуемом уровне.
Формирование критерия эффективности. Критерий эффективности представляет собой совокупность норм, по которым судят об успешности достижения цели. При разных начальных условиях задачи эти нормы могут отличаться. Так при предупреждении столкновений они зависят от ситуации, образуемой судами, границами судоходной акватории, погодными условиями. Формирование критерия эффективности состоит в выборе его норм, отвечающих сложившейся ситуации.
Определение множества допустимых решений обычно заключается в нахождении безопасных стратегий расхождения с помощью формируемых в ОДМ виртуальных зон, отражающих ограничения, накладываемые «целями» на действия судна оператора.
Поиск и представление эффективной стратегии. Поиск заключается в нахождении среди допустимых решений стратегии, критерий эффективности которой максимален. Для определения такого варианта расхождения используются разные методы. Кратко они представлены в параграфе 2.6. Так как при определении наилучшей стратегии система не может учесть все особенности ситуации, то эта стратегия представляется оператору для корректировки и утверждения.
2.3. Типы d-критерия опасности объектов
Судовые домены. Показатель угрозы объекта в виде прогноза минимальной дистанции расхождения с ним называется d-критерием.
В процессе выполнения перехода стараются, чтобы к судну не были чрезмерно близки другие объекты. Для установления такой опасности
35
обычно используют окружающую судно и жестко связанную с ним область. Ее обычно называют судовой домен (англ. domain). Попадание объекта в домен судна трактуется как угроза его движению.
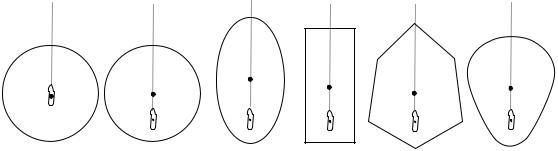
Судовые домены предложено использовать для оценки навигационной безопасности Е.М.Гудвиным (Goodwin E.M. A statistical study of ship domain, Journal of Navigation, 28, 1975). В настоящее время при исследовании проблемы предупреждения столкновений судов рассматриваются различные виды доменов. Они могут быть круговыми, эллиптическими, в виде полигонов или более сложных фигур (рис. 2.2).
а) |
б) |
в) |
г) |
д) |
е) |
Рис. 2.2. Возможные формы домена судна
Границу домена можно рассматривать как функцию курсового угла q судна
d s = C fd (q) , |
(2.1) |
где d s - расстояние от точек границы домена до центра массы судна; C - коэффициент, учитывающий особенности ситуации.
Оптимальные форма и размеры домена опасности зависят от многих факторов, что затрудняет его определение.
Несмещенный круговой домен. Преобладающее применение в СПС нашел круговой домен с центром в месте судна (см. рис. 2.2,а) благодаря одинаковому расстоянию от судна до точек границы домена. Для него fd (q)
является постоянной величиной и, соответственно, d s не зависит от курсового угла. Такой домен называется несмещенным. Его граница задается
одним значением d s расстояния кратчайшего сближения.
Недостаток несмещенного домена круговой формы состоит в том, что он не отражает отличия по степени опасности объектов, появляющихся на его границе на носовых и кормовых курсовых углах. Известно, что объекты в носовом секторе судна представляют большую угрозу, чем объекты в кормовом.
Другие виды судовых доменов. Чтобы учесть распределение степени риска в зависимости от курсового угла появления объектов, применяются домены разной формы и стабилизации по судну. Представители некоторых из них показаны на рис. 2.2,б-е. При использовании таких областей
36
допустимое расстояние кратчайшего сближения ( d s ) зависит от геометрии сближения с объектом.
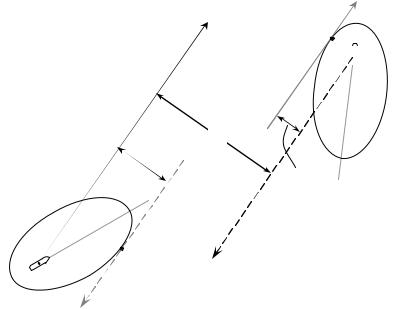
Принцип определения d s в этом случае характеризуется на примере эллиптического домена со смещенным центром. При оценке угрозы столкновения судов A и B (рис. 2.3) домен образуется у каждого из них.
Ситуация сближения безопасна, когда относительный курс kA судна A не пересекает границу домена судна B , и, когда относительный курс kB
последнего судна не пересекает домена первого ( kB = kA ±1800 ).
Из этого условия следует, что суда не будут представлять друг для друга угрозы, когда расстояние d кратчайшего сближения между ними будет больше как значения d sA , так и d sB (см. рис. 2.3)
dt > d s , где d s = MAX (d sA , d sB ) .
.
kA
kA

 B
B
d
dsA
dsB
А |
kB |
|
|
kB |
Рис. 2.3. К определению допустимого |
|
расстояния кратчайшего сближения |
Недостатками доменов, отличающихся от несмещенных круговых, являются:
−усложнение оценки ситуаций и выбора действий для безопасного расхождения;
−ухудшение наглядности графического изображения ситуации, и затруднение глазомерной оценки ее опасности с помощью линий относительного движения;
−не учет, что в разных ситуациях оптимальный домен изменяет не только размеры, но и форму.
Вданной книге в качестве d-критерия опасности используется несмещенный круговой домен, при котором условие наличия угрозы столкновения имеет вид
37
d ≤ d s ;
где d s - задаваемое судоводителем значение, определяющее границу безопасных значений DCPA.
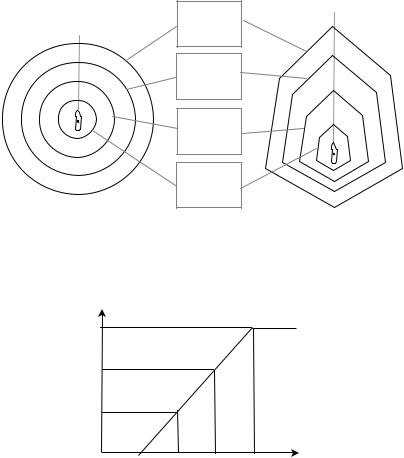
Нечетко задаваемые домены. При рассмотрении задач предупреждения столкновений применяют и нечеткие домены, позволяющие не только установить наличие угрозы, но и определить ее степень. Не требует доказательства, что чем больше по размерам судовой домен (коэффициент C
вформуле 2.1), тем меньше угроза от объектов, находящихся на его границе,
итем выше уровень безопасности стратегий расхождения, определяемых в зависимости от этих границ.
а) |
C = C |
, |
б) |
|
ps=1 |
|
|
|
C = C j |
|
, |
|
ps=psj |
|
|
|
C = C , |
||
|
ps=psii |
|
|
C = C , ps=0
Рис. 2.4. Нечеткое задание домена судна
ps
1.0 |
|
psj |
|
psi |
|
0.0 |
C |
|
C Ci Cj C
Рис. 2.5. Функция принадлежности к безопасным значениям
Допустим, при рассмотрении доменов двух видов (рис. 2.4) экспертами считается, что при значении C ≥ C в формуле 2.1 степень безопасности расхождения можно принять равной единице ( ps =1); а если C ≤ C , то ps = 0. Например, для несмещенного кругового домена в СПСI границы C и C( приближенно соответствует значениям d s тридцать и пять кабельтов.
38