


самых опытных из них (экспертов). Прибегнув к их консультациям, также можно выполнить поставленную задачу.
На основе опроса судоводителей или данных экспертов составляется таблица (вида 5.10) значений μ и κ для различных районов плавания.
Таблица 5.10. - Значения редукционных коэффициентов μ и κ
Район плавания |
µ |
κ |
1 ------------------------------ |
μ1 |
κ1 |
2 ------------------------------ |
μ2 |
κ2 |
… ………………………… |
… |
… |
i ------------------------------ |
μi |
κi |
… ………………………… |
… |
… |
m ------------------------------ |
μm |
κm |
Для нормальной или ограниченной видимости адекватная району граница безопасности устанавливается соответственно по формулам
d sr = μ d b или d sr = κ d b .
Особенности определения границы TCPA. Норма ts связана с d s , так как с уменьшением последней в среднем снижается и время, требуемое на
выполнение маневра расхождения. Для стесненных вод обычно задают ts из интервала 10÷15 мин., а для открытого моря – 15÷30 мин. Определение
рациональных значений t sr для конкретных акваторий, можно выполнить аналогично нахождению d sr .
Кроме границы безопасности ts , отмечающей момент возникновения взаимных обязанностей двух судов при опасном по d-критерию сближении,
желательно также оценить и границы tt , tu заблаговременных и срочных
маневров. Необходимость использования tu возникает чрезвычайно редко, так как все предпринимаемые международными организациями меры направлены на то, чтобы чрезвычайных ситуаций расхождения вообще не
было. Нахождение tu обсуждается в главе 10.
Нижняя граница tt заблаговременных действий четко или нечетко должна устанавливаться при каждом расхождении. Грубо ее считают равной
половине ts .
5.9. Алгоритм расчета поправки на размеры судов
По линии АИС получают информацию о длине, ширине «цели» и положении ее антенны GPS. Эти данные позволяют учесть размеры «цели»
при назначении d s .
137
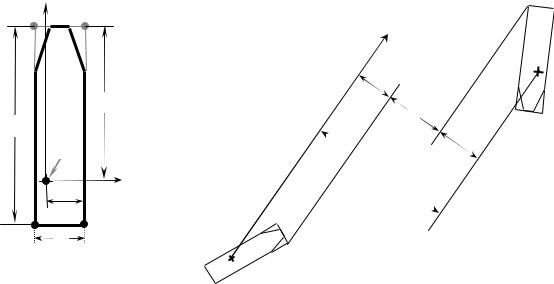
На рис. 5.6 представлен контур судна в горизонтальной плоскости и обозначенное буквой A место его антенны GPS. С этой точкой жестко связано начало координатной системы lb , ориентированной по направлению диаметральной плоскости.
2 |
l |
1 |
|
|
|
|
|
|
kH0 |
||
|
|
|
|
|
|
|
|
|
|
|
АН |
|
GPS |
lА |
|
L0 |
t |
L |
Антенна |
|
|
|
δ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
d |
LH |
|
A |
b |
|
|
|
|
|
|
|
|
|
|
bA |
|
|
|
|
4 |
B |
3 |
|
|
|
Рис. 5.6. Схема |
А0 |
Рис. 5.7. Схема движения корпуса |
|||
корпуса судна |
|
СО относительно СЦН |
|||
Для упрощения нахождения поправок на размеры судов их контуры считаются прямоугольниками. На рисунке 5.6 вершины такого прямоугольника обозначены цифрами 1, 2, 3, 4, а расстояния от места
антенны до носовой части судна и до правого борта – соответственно lA и
bA . В системе lb координаты вершин |
|
представляющего судно |
||
прямоугольника будут следующими: |
|
|
||
l1 = lA , |
b1 = bA ; |
l2 = lA , |
b2 |
= bA − B |
l3 = lA − L, b3 = bA ; |
|
|
, (5.10) |
|
l4 = lA − L, b4 = bA − B |
||||
где L , B - длина и ширина судна.
Степень опасности столкновения двух судов (рис. 5.7) характеризуется
кратчайшим расстоянием δ свободного водного пространства между их корпусами при расхождении. Если пренебречь погрешностью измерения
расстояния d , то оно будет связано с δ соотношением
|
|
d = δ+ |
L0 + LH , |
(5.11) |
где L0 , LH |
- поправки, учитывающие размеры судна оператора и СЦН. |
|||
Величина поправок |
L0 , LH |
зависит от того, по носу или по корме |
||
пересекается |
курс «цели» |
судном |
оператора. |
Так как принцип расчета |
138
поправок |
L0 , |
LH |
одинаков, рассмотрим нахождение только |
L0 . |
|
Положение |
корпуса |
СО (в виде прямоугольника), истинный |
|
и |
|
K |
|||||
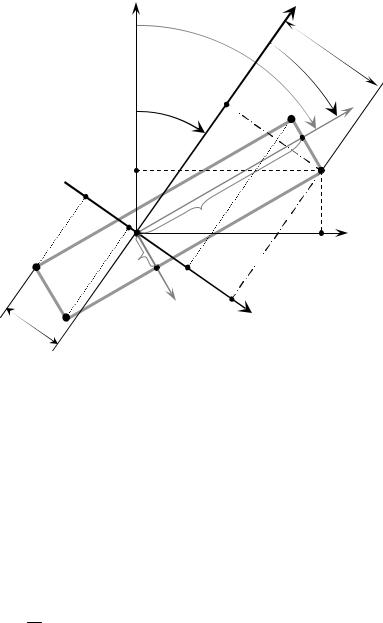
относительный kH 0 курсы представлены на рис. 5.8. Для пересечения линии курса СО другим судном по носу значение поправки L0 обозначено , а
при прохождении его по корме - |
. |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Y |
|
|
|
|
|
|
|
|
S |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
2 |
γ |
|
l |
|||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
kН0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1 |
|
|
|
|
|
|
|
1 |
|
|||||
|
|
Q4 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
||||
|
|
Q |
A0 |
|
|
|
|
|
|
X |
||||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||
4 |
|
b1 |
|
|
|
|
|
|
|
|
X1 |
|||||
|
Q2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
b |
|
|
Q1 |
Q |
|||||||
|
|
3 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 5.8. К расчету поправки на размеры судна
Свяжем с местом антенны GPS судна три прямоугольные координатные системы: lb , XY , SQ , где ось Y системы XY ориентирована по
меридиану, а ось S системы SQ - по линии относительного курса kH 0 .
Координаты вершин прямоугольника в первой системе определяются выражениями (5.10).
Расчет поправки или |
, учитывающей размеры судна, сводится к |
преобразованию координат li ,bi |
(i =1, 2, 3, 4) вершин представляющего его |
прямоугольника из системы lb в систему SQ . Оно может быть выполнено с учетом угла γ = K −kH 0 между осями этих систем, либо преобразованием li , bi сначала в систему XY , а затем из нее в SQ .
На рис. 5.8 выполнены построения, поясняющие пересчет координат только первой вершины прямоугольника. Формулы преобразования координат этой вершины из системы lb в систему SQ имеют вид:
139
S1 = l1 cos γ −b1 sin
Q1 = l1 sin γ +b1 cos
При пересчете координат из системы lb XY получаем:
γ.
всистему
(5.12)
SQ через систему
X |
|
= l cos |
|
|
−b sin |
|
|
|
S |
=Y cosk |
|
+ X |
|
sink |
|
|
|
||
1 |
K |
K |
H 0 |
1 |
H 0 |
|
|||||||||||||
|
1 |
|
1 |
|
|
|
, |
1 |
1 |
|
|
|
. (5.13) |
||||||
Y1 = l1 sin |
K |
+b1 cos |
K |
|
Q1 = −Y1 sinkH 0 + X1 coskH 0 |
|
|||||||||||||
Координаты Si , Qi других вершин представляющего контур судна
прямоугольника находятся аналогично.
Для случая, когда «цель» пересекает по носу линию пути показанного на рис. 5.7 судна оператора, получаем
= MAX{ |
|
|
Q |
|
, |
|
|
Q |
|
}. |
(5.14) |
||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
||
При пересечении курса судна по корме |
|
|
|
|
|
|
|
|
|
||||||||
= MAX{ |
|
Q |
|
, |
|
Q |
|
}. |
(5.15) |
||||||||
|
|
|
|
||||||||||||||
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|||
Корректный учет размеров судна при расхождении в стесненных районах позволяет повысить безопасность плавания.
140