

этому множеству с большой вероятностью принадлежат заданные СЦ границы безопасности.
Предложенные виды математических моделей образуемых судами ситуаций охарактеризованы в параграфе 2.6.
5.3. Описание навигационных ограничений
Для задач судовождения общепризнанной моделью навигационных условий служит навигационная карта, как обладающая высокой информативностью, пространственным подобием относительно оригинала, метричностью, обзорностью и наглядностью. При организации компьютерной поддержки решений особенно удобным является использование этих карт в электронном виде.
Если рассматривать задачу предупреждения столкновений изолированно, то видна избыточность представленной на навигационной карте информации. Поэтому выбирают более простую модель навигационных ограничений [37]. Главное назначение такой модели состоит в определении акватории, где может произойти столкновение и за границы которой не должно выходить СО при решении задачи расхождения с другими судами.
Эту акваторию можно выделить с помощью опасной изобаты, ограничивающей область с приемлемыми для СО глубинами [35]. Учет конфигурации акватории по такой изобате связан с определенными трудностями. Кроме того, эта модель обладает определенной избыточностью, состоящей в следующем.
Так как СО придерживается своего плана движения, то область его возможных маневров лежит около намеченной линии пути. С одной стороны это определяется тем, что принятие решения предшествует его реализации. С другой стороны, вряд ли оправданным с точки зрения целей рейса является возвращение СО по линии пути назад. Поэтому в большинстве случаев для учета навигационных условий достаточна модель, отражающая безопасное пространство, за границы которого с высокой степенью вероятности не выйдет СО, предпринимая необходимые для предупреждения столкновений действия в будущем. Такое пространство сокращенно обозначим ОДМ
(область движения и маневров).
Рационально брать ОДМ в виде полосы с границами, параллельными линии пути судна оператора, и с началом в его текущем месте, например, как показано на рис. 5.1. Боковые границы этой полосы должны отсекать акватории опасных для судна глубин и запретные для движения районы.
ОДМ задается расстояниями ее левой и правой границ от линии пути судна оператора ( ξP , ξS ), и углом θ в пределах 600÷900. Эта область
выделяется и в открытом море, где нет необходимости анализировать опасность столкновения во всей зоне обзора, так как значительное уклонение
115
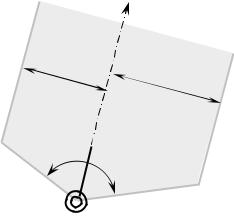
от намеченной линии пути не является оправданным. Ширина ОДМ (ξZ = ξP +ξS ) в общем случае отражает стесненность района плавания.
Заметим, что ОДМ напоминает выделяемую в ECDIS у отметки судна область риска, о попадании в которую реальных объектов (берега, подводных препятствий, судов и т.д.) эта система сигнализирует. В отличие от образуемой в ECDIS области ОДМ служит для выявления в ней
виртуальных объектов – зон возможного чрезмерного сближения с
«целями». Эти зоны лежат на линии пути «целей». Их появление в ОДМ свидетельствует о тех или иных ограничениях движения или маневров судна оператора на участках его будущего пути.
К
ξP ξS
θ  θ
θ
0
Рис. 5.1. Область движения и маневров
5.4. Входные и выходные данные модели обстановки
Совокупность судов, оказывающих то или иное влияние на меры по предупреждению столкновений, обычно рассматривается как система судовцелей (ССЦ). Им присваиваются порядковые номера − 1, 2, ... ,n, где n -
количество судов в ССЦ ( n ≥1). К обозначению «цели», при необходимости,
в индексе добавляется ее номер, например, СЦ5. Номер судна оператора считается нулем. Ниже на схемах и рисунках положение СО и СЦ обозначается их номерами. Произвольно выбранная в ССЦ «цель» характеризуется символом J или H , отражающим ее номер.
Система ССЦ с добавленным в нее судном оператора считается расширенной и обозначается РССЦ. Во времени топология этой системы не остается неизменной. Когда все суда идут постоянными курсом и скоростью, то их координаты изменяются со временем линейно. РССЦ с таким характером изменения, при котором не проявляются инерционные эффекты, относится к классу стационарных. При маневрировании хотя бы одной «цели» РССЦ становится нестационарной [1]. Обычно РССЦ считают стационарной, так как периоды маневров судов малы.
Модель образуемых судами ситуаций предназначается для получения по данным источников информации характеристик, отражающих состояние
116
РССЦ. Источники информации служат измерительные приборы, средства связи, электронные навигационные пособия и другие датчики.
Опорными числовыми параметрами стационарной РССЦ являются координаты, курс и скорость ( X J , YJ , KJ , VJ ) входящих в систему судов,
где для судна оператора J = 0. Стационарный характер системы описывается линейными алгебраическими уравнениями, которые отражают прямолинейное равномерное движение судов:
X J (t)= X J (t0 )+VJ sinKJ (t −t0 ) |
|
|||||||||
Y |
(t)=Y (t |
0 |
)+V |
J |
cosK |
J |
(t −t |
0 |
) , |
(5.1) |
J |
J |
|
|
|
|
|
||||
где t0 - начальный момент времени.
С помощью этих выражений, при необходимости, прогнозируется состояние РССЦ на определенное время вперед. Опорные данные позволяют по формулам (3.12)-(3.19) для каждой пары судов системы найти значения параметров их сближения.
Ситуации расхождения характеризуются также другими параметрами и отношениями, которые отражаются в ее модели. Так как при решении задач предупреждения столкновений требуется учитывать как количественные, так и качественные характеристики РССЦ, то в ее описание включается логиколингвистическая составляющая [6]. Основные лингвистические параметры с возможными термами представлены в табл. 5.1. Эти переменные приведены к перечисляемому виду, в котором термам присваиваются порядковые номера. Такая особенность позволяет упростить запись алгоритмов путем замены в логических выражениях названий термов их порядковыми номерами. Ниже, если имеются в виду не термы, а их порядковые номера, в верхнем индексе обозначения лингвистической переменной добавляется
символ N , например, U* N .
Как уже отмечалось, моделью ситуации устанавливается связь между получаемыми об ее развитии сведениями (входной информацией), и выходными величинами (сжатыми характеристиками, обеспечивающими понимание особенностей рассматриваемого процесса).
Входные величины характеризуют:
−район плавания;
−состояние видимости;
−«цели» и параметры их движения;
−собственное судно;
−положения регламентирующих документов.
ВСПСII, отображающих электронные карты, информация о районе плавания содержится в картографической базе данных (КБД). Основными данными о «целях» и собственном судне служат их текущее положение, курс, скорость, навигационный статус, размеры.
117
Выходная информация - это количественная и качественная характеристики ситуации. При выборе этих показателей учитываются следующие обстоятельства.
Таблица 5.1. – Перечень основных признаков ситуации
№ пп |
Лингвистическая переменная |
Обозн. |
|
Термы (значения лингвистической переменной) |
1. |
Видимость |
W* |
0 - Нормальная; |
|
|
|
1 - Ограниченная. |
||
2. |
Район плавания |
R* |
1 - Открытое море; |
|
|
|
2 - Прибрежные воды; |
||
|
|
|
3 |
- Мало стесненные воды; |
|
|
|
4 |
- Стесненные воды. |
3. |
Интенсивность движения |
I* |
1 – Малая; |
|
|
|
2 - Средняя; |
||
|
|
|
3 |
– Большая. |
4. |
Уровень границ безопасности |
U* |
1 - Низкий; |
|
|
|
2 - Умеренный; |
||
|
|
|
3 |
- Средний; |
|
|
|
4 |
- Высокий; |
5. Статус судна J согласно пр. 18, |
|
5 |
– Очень высокий. |
|
S*J |
1 – С механическим двигателем; |
|||
|
МППСС72 |
2 - Парусное; |
||
|
|
|
3 |
– Занятое ловом рыбы; |
|
|
|
4 |
– Ограниченное в возможности маневрировать; |
|
Статус судна H по отношению к |
* |
5 |
– Лишенное возможности управляться. |
6. |
-1 – Низший; |
|||
|
судну J |
SJH |
0 - Равный.; |
|
|
Категория судна H по степени |
|
1 |
- Высший.; |
7. |
C*JH |
1 - Безопасное; |
||
|
опасности для судна J |
2 - Безопасное лимитирующее маневр судна J; |
||
|
|
|
3 |
- Потенциально опасное; |
|
|
|
4 |
- Опасное I степени; |
|
|
|
5 |
- Опасное II степени; |
|
|
|
6 |
- Опасное III степени; |
8. Вид сближения судов H и J |
A*JH |
1 - Обгон судна J судном H; |
||
|
|
2 – Обгон судна H судном J; |
||
|
|
|
3 |
- Пересечение курсов, судно H слева; |
|
|
|
4 |
- Пересечение курсов, судно H справа; |
|
|
|
5 |
- Идущие прямо (или почти прямо) друг на друга суда J и H. |
|
|
|
6 – Обгоняемое судно H впереди траверза судна J; |
|
|
|
|
7 – Необгоняемое судно H впереди траверза судна J; |
|
|
|
|
8 – Судно H на траверзе J или позади траверза слева; |
|
|
|
|
9 – Судно H на траверзе J или позади траверза справа. |
|
9. Вид судна H по характеру |
G*JH |
0 – Не определяет мер судна J по предупреждению |
||
|
влияния на выбор судном J |
|
столкновения; |
|
|
заблаговременных мер по |
|
1 – Определяет, что судно J будет обязано сохранять |
|
|
предупреждению столкновения |
|
|
курс и скорость (H главное потенциально опасное судно |
|
|
|
|
для J) ; |
|
|
|
2 |
– Определяет, что судно J будет обязано предпринять |
|
|
|
|
маневр расхождения (H главное потенциально опасное |
|
|
|
|
судно для J); |
|
|
|
3 |
– Определяет, что судно J обязано сохранять курс и |
|
|
|
|
скорость (H главное опасное судно для J); |
|
|
|
4 |
– Определяет, что судно J обязано предпринять маневр |
|
|
|
|
расхождения (H главное опасное судно для J). |
118
Правила МППСС-72 в основном координируют действия двух судов при расхождении. Учитывая важность бинарных отношений, одним из основных показателей состояния РССЦ считается численная характеристика
|
|
Q00 |
Q01 |
... |
Q0H |
... |
Q0n |
|
|||||
|
|
Q |
Q |
|
... |
Q |
|
... |
Q |
|
|
|
|
|
|
|
10 |
11 |
|
1H |
... |
1n |
|
|
|||
Q |
|
... ... ... ... |
... |
(5.2) |
|||||||||
S |
= |
|
QJ1 |
... |
QJH |
... |
|
|
. |
||||
|
QJ 0 |
QJn |
|
||||||||||
|
|
... ... ... ... |
... |
... |
|
|
|||||||
|
|
Q |
n0 |
Q |
n1 |
... |
Q |
nH |
... |
Q |
|
|
|
|
|
|
|
|
|
|
|
nn |
|
||||
Компоненты этой матрицы, кроме диагональных, являются векторами относительных состояний пар судов РССЦ
QJH =[ПJH DJH dJH ttJH ] T .
Диагональные элементы характеризуют положение и параметры движения судов относительно грунта
QJJ =[X J YJ KJ VJ ] T .
Второй показатель ZS с кодовыми элементами ZJH отражает
качественное состояние РССЦ
|
|
Z00 |
Z01 |
... |
Z0H |
... |
Z0n |
|
|||||
|
|
Z |
Z |
|
... |
Z |
|
... |
Z |
|
|
|
|
|
|
|
10 |
11 |
... |
1H |
... |
1n |
|
|
|||
Z |
|
... |
... |
... |
... |
(5.3) |
|||||||
S |
= |
|
ZJ1 |
... |
ZJH |
... |
|
|
. |
||||
|
ZJ 0 |
ZJn |
|
||||||||||
|
|
... |
... |
... |
... |
... |
... |
|
|
||||
|
|
Z |
n0 |
Z |
n1 |
... |
Z |
nH |
... |
Z |
|
|
|
|
|
|
|
|
|
|
|
nn |
|
||||
Компоненты матрицы ZS |
являются трехзначными |
кодами. |
|||
Диагональные элементы равны нулю ( ZJJ = 000 ). Остальные |
значения |
||||
образуются номерами термов трех лингвистических переменных |
|
||||
Z |
JH |
= G* N C* N |
A* N . |
(5.4) |
|
|
JH |
JH |
JH |
|
|
119