


для устранения угрозы столкновения, и есть ли «цели», лимитирующие это действие.
 J
J
3
0 
Рис. 7.12. Метка от опасной «цели» и минимальная ОДМ
2 |
ОДМ1 |
|
1 |
||
|
||
С |
|
|
|
ОДМ0 |
|
0 |
|
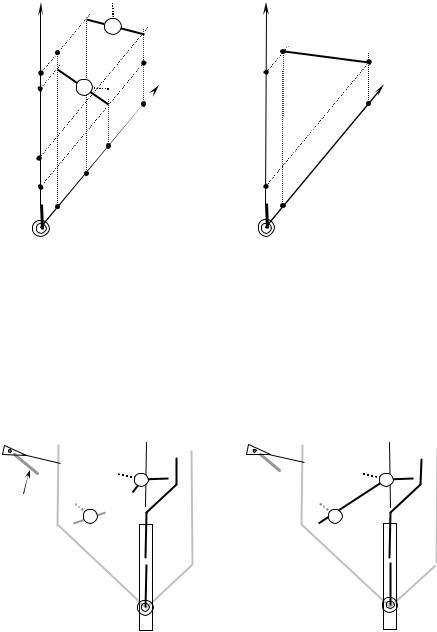
Рис. 7.13. Планирование двух В-маневров
Планирование последовательных В-маневров. Когда в ОДМ0 первый В-маневр определен, может намечаться второе действие (см. рис. 7.13, а также параграф 5.4). Для этого на линии нового пути берется определяющая акваторию (ОДМ1) второго В-маневра опорная точка C . В этой акватории показываются МОМ, рассчитанные по прогнозу движения СО и «целей».
По меткам в ОДМ1 находится второй маневр. Точка C определяет ОДМ1 до тех пор, пока СО не придет в нее. После этого базовой точкой ОДМ1 становится текущее место СО.
Аналогично намечаются, если необходимо, третий и следующие за ним маневры [6].
7.6. Обобщение каркаса В-маневра и учет возможных действий «цели»
Обобщение каркаса В-маневра. Иногда изображение меток ограничений, накладываемых «целями» на В-маневр СО, можно обобщить. Признаком возможности такой операции является пересечение проекций двух меток на исходную линию пути и линию уклонения. Примером (рис.
7.14,а) могут служить метки AJ BJ и AH BH , отражающие ограничения «целей» J и H на В-маневр СО. Вместо этих двух меток может использоваться одна эквивалентная AΣBΣ (рис. 7.14,а,б).
Координаты концов эквивалентной метки получаются по формулам
ζAΣ = MAX (ζAJ ,ζAH ) , |
ηAΣ = MIN(ηAJ ,ηAH ) ; |
ζBΣ = MIN(ζBJ ,ζBH ) , |
ηBΣ = MAX (ηBJ ,ηBH ) . |
Возможность такого обобщения распространяется и на большее число МОМ с пересекающимися проекциями. Охарактеризованная операция уменьшения числа меток ограничений маневра СО называется обобщением
186
каркаса. В общем случае эквивалентная метка отмечает запрещенную для В- маневров СО область, порождаемую группой СЦ.
ζ |
АJ |
ВJ |
|
ζ |
|
||
|
J |
|
|
|
|
|
|
АΣ |
|
|
АΣ |
|
|
|
|
ВΣ |
|
J, H |
|
||||
ζAJ |
АH |
ζAΣ |
|
|
ВΣ |
||
|
|
|
|||||
ζAH |
H |
η |
|
|
|
η |
|
|
|
|
|
||||
|
ВH |
ηBJ |
|
|
|
|
ηBΣ |
ζBJ |
ηBH |
|
|
|
|
|
|
ζBH |
ηAJ |
а) |
ζBΣ |
|
б) |
|
|
|
ηAH |
|
0 |
ηAΣ |
|
||
0 |
|
|
|
|
|
|
|
Рис. 7.14. Принцип обобщения каркаса В-маневра
Учет возможного маневра «цели». При выборе действия для устранения угрозы столкновения необходимо учитывать возможный маневр «цели». В частности, это касается случая расхождения в ситуации пересечения курсов, когда «цель» является непривилегированной, но, по мнению СО, запаздывает с маневром. Ожидаемым действием «цели» в этой ситуации является отворот вправо на угол порядка 400.
1 |
1 |
1 |
1 |
Вероятный |
|
|
новый курс |
1 |
1 |
|
СЦ
а) |
0 |
б) |
0 |
|
|
Рис. 7.15. Метка ограничений В-маневра, учитывающая вероятное изменение курса «целью»
При выборе маневра СО вероятное изменение курса «целью» может быть учтено объединением меток ограничения В-маневра СО, соответствующих ее исходному и предполагаемому курсу. Эта операция иллюстрируется на рис. 7.15, где приведена метка (рис. 7.15,б), эквивалентная двум меткам (рис. 7.15,а) для исходного и вероятного курса «цели».
187
7.7. Принцип численного определения оптимального В-маневра
При наличии критерия, объективно отражающего эффективность действий по предупреждению столкновений, оптимальный В-маневр расхождения с судами может быть найден и рекомендован судоводителю компьютером СПС. Один из возможных путей решения этой задачи характеризуется ниже при выборе В-маневра вправо. При уклонении влево алгоритм получения результата такой же.
Когда вид функции выполнения поворота и ее параметр заданы, В- маневр полностью определяется своей опорной точкой F . Ее положение характеризуется на рис. 7.16,а в прямолинейной системе координат ζη с
углом θ между осями. В этой системе
θ- угол уклонения;
ζ- расстояние от места судна оператора до путевой точки CH пересечения
исходной линии пути с линией курса уклонения; η - дистанция между точками CH и F .
Область поиска оптимального В-маневра. Для нахождения значений
θ, ζ, η, при которых критерий оптимальности достигает максимума, определяется область допустимых значений координат точки F :
θ0 ≤ θ ≤ θG , ζθ ≤ ζ ≤ ζG , ηθ ≤ η≤ ηG ; (7.22)
где левые границы ζθ, ηθ зависят от угла θ.
На рис. 7.16,а представлена область (абвг) допустимых значений координат ζ и η для одного из значений θ.
Так как уклонение при расхождении должно быть заметным, то для открытого моря и прибрежных вод левую границу диапазона θ можно взять
θ0 = 300 . Правая граница θG назначается 1500 или меньше.
Выбирая границы второго интервала (7.22), необходимо учитывать следующее. Если начать В-маневр в текущий момент времени, то точка CH (см. рис. 7.16,а) будет находиться от места судна на расстоянии Sθ (см. рис. 7.9). Поэтому граница ζθ задается большей Sθ, например,
ζθ = Sθ + sm ,
где sm - расстояние, проходимое судном оператора за 1 минуту.
Другая граница ζG должна быть ближе к месту судна, чем точка его кратчайшего сближения с главной «целью». Например, можно взять
ζG =V tθ −sm .
188

ζ |
|
|
CK |
|
|
CK |
|
|
|
ξS |
|
в |
|
|
|||
|
|
|
|
|
|
|||
|
|
M3 |
A3 |
Z3 |
|
|
|
|
|
|
|
|
ζ |
i |
|
||
|
|
|
Q3 |
dG |
|
|
||
Q2 |
б |
|
|
|
η |
|
||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
M2 |
|
|
|
|
|
|
|
|
ζG |
Z2 |
M1 |
F |
|
|
nζ |
Fhij |
|
|
|
|
|
|
|
|
||
|
|
A1 |
Q1 |
|
|
ζ |
|
|
|
|
|
Z1 |
|
|
|
||
ζ |
CH |
|
г |
i |
|
η |
||
|
|
|
η |
|
||||
|
|
|
|
|
|
… |
|
nη j |
|
|
|
|
|
ηG |
3 |
|
|
|
|
|
η |
|
|
2 |
j |
η |
|
|
а |
|
|
|
|||
|
|
|
|
1 |
|
|||
ζθ θ |
|
|
|
… |
|
|||
|
а) |
|
|
0 θh 1 2 б) |
|
|||
|
|
ηθ |
|
|
|
ζθ |
ηθ0 |
|
0 |
|
|
|
|
0 |
|
||
Рис. 7.16. К расчету оптимального В-маневра
Охарактеризуем теперь границы интервала η. В-маневр с заданным углом уклонения θ может быть нормально выполнен, когда величина смещения по оси 0η (см. рис. 7.5) не меньше значения 2 Sθ. Поэтому целесообразно назначить
ηθ = 2 Sθ .
Вторая граница ηG определяется шириной ξS полосы ОДМ
ηG = ξS / sinθ.
Количество возможных позиций точки F в выделенной области (7.22) является бесконечным. Для поиска оптимального В-маневра эта область квантуется, т.е. представляется конечным числом положений, взятых через
определенные интервалы приращений θ, |
ζ , |
η координат θ, ζ, η: |
||
θh = θ0 +h θ, |
ζi = ζθ +i |
ζ, |
ηj = ηθ + j η, |
(7.23) |
где h = 0,1, 2, ... , nθ, |
i = 0,1, 2, ... , nζ, |
j = 0,1, 2, ... , nη. |
|
|
189
Значения nθ, nζ, nη находятся по формулам: |
|
|
|
||||||
n |
= INT ( |
θG −θ0 |
) , n |
= INT ( |
ζG −ζθ |
) , n |
= INT ( |
ηG −ηθ |
) ; |
|
|
|
|||||||
θ |
|
|
ζ |
|
|
ξ |
|
|
|
|
|
θ |
|
ζ |
|
η |
|||
где функция INT дает целую часть аргумента. |
|
|
|
||||||
Пример дискретных положений точки F при одном значении θ = θh |
|||||||||
показан на рис. 7.16,б. |
Если, например, взять |
θ0 = 300 , |
θG =1400 , |
|||||||||
Д |
и |
=100 ( n |
=11); |
ζ |
= |
η |
= s |
m |
, n =19, |
n |
=19 , то |
количество |
|
θ |
|
|
|
ζ |
η |
|
|
||||
позиций F (возможных вариантов В-маневра) будет равно |
|
|||||||||||
|
|
N = (nθ +1) (nζ +1) (nη +1) =12 20 20 = 4800. |
|
|||||||||
|
|
Перебрав в этом случае 4800 вариантов В-маневра с оценкой |
||||||||||
эффективности каждого, можно найти из них оптимальный. |
|
|||||||||||
|
|
Метод поиска оптимального В-маневра. При рациональной величине |
||||||||||
интервалов дискретности |
|
θ, |
|
ζ , |
|
η количество возможных позиций Fhij |
||||||
определяющей В-маневр точки |
F в области (7.22) |
не является слишком |
||||||||||
большим. Это позволяет, учитывая простоту выражений для расчета критерия качества, выполнить поиск оптимального маневра методом перебора. На современных компьютерах затрачиваемое на решение этой задачи время обычно не превышает 5 с.
Согласно методу перебора для каждой из возможных позиций Fhij в области (7.22) определяется вариант расхождения, включающий три участка
−от текущего места до начала уклонения от маршрута;
−перемещения по линии уклонения;
−движения исходным курсом после уклонения.
Длина последнего отрезка берется равной расстоянию, проходимому
судном оператора за время 1,2 tsr , где tsr - рациональная для рассматриваемых условий граница безопасных ТСРА.
Пример одного из перебираемых вариантов пути расхождения при В- маневре показан на рис. 7.16,б жирной линией.
Для оценки эффективности маневра может, например, использоваться подход, представленный в параграфе 6.4. Согласно ему значение показателя эффективности получается объединением частных критериев: безопасности,
экономичности и соответствия МППСС-72.
Из перебираемых вариантов В-маневра оптимальным считается тот,
у которого значение критерия качества максимально.
190