

|
|
|
|
|
|
|
|
tA1 = tA0 − |
ta |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
tA2 = tA0 + |
|
|
|
|
|
|
|
(7.19) |
|||||
|
|
|
|
|
|
|
|
ta , |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
tB1 = tB0 − |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
tb |
|
|
|
|
|
|
|
||||||
9) Находятся координаты концов метки |
|
|
|
|
|
|
|
||||||||||||||
X |
M |
= X |
|
+ 2 S |
EX |
+V t |
B1 |
sinK |
S |
+V t |
A2 |
sinK |
|
|
(7.20) |
||||||
|
|
|
0 |
|
|
|
|
|
|
|
Ш , |
|
|||||||||
YM =Y0 + 2 SEY +V tB1 cosKS +V tA2 cosKШ |
|
|
|||||||||||||||||||
|
X |
Z |
= X |
|
+ 2 S |
EX |
+V t |
B2 |
sinK |
S |
+V |
t |
A1 |
sinK |
|
|
(7.21) |
||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Ш . |
|
||||||
|
YZ =Y0 + 2 SEY +V tB2 cosKS +V tA1 cosKШ |
|
|
||||||||||||||||||
10) По этим координатам выделяются для отображения на экране метки, |
|||||||||||||||||||||
попавшие в ОДМ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
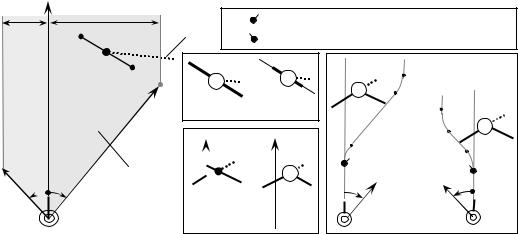
7.5. Отображение меток ограничений В-маневра и их использование |
|||||||||||||||||||||
Изображение меток. На экране СПС представляются метки, которые |
|||||||||||||||||||||
попали в область движения и маневра СО. Она состоит из двух полос |
|||||||||||||||||||||
допустимых смещений влево и вправо под углом θ (рис. 7.8,а). Ширина этих |
|||||||||||||||||||||
полос обозначена ξP , ξS . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
ξP |
КØ |
|
ξS |
|
Линия |
з) |
Предельная точка начала В-маневра вправо; |
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
M |
|
Q |
|
пути СЦ |
|
Предельная точка начала В-маневра влево. |
|||||||||||
|
|
|
|
|
|
Z |
J |
|
|
J |
|
|
|
J |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
КS |
б) |
|
|
в) |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
а) |
КØ |
|
|
КØ |
|
|
|
е) |
|
|
J |
||||
|
|
|
|
|
|
|
|
|
|
|
ж) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KS |
|
|
|
КP |
|
|
θ |
θ |
|
ОДМ |
|
|
|
|
|
J |
|
|
|
θ |
КP |
θ |
|
||
|
|
|
|
|
|
г) |
|
|
|
д) |
|
|
|
|
|
||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Рис. 7.8. К отображению меток опасных В-маневров |
|
||||||||||||||||
На экране метка MZ показывается без линий ее построения. Она дополняется номером соответствующей ей «цели» и указывающим на эту «цель» точечным отрезком (рис. 7.8,б).
Для неопасной по d-критерию «цели» кружочек с номером помещается в центре метки. Чтобы знать, до какого значения можно ослабить ограничение на В-маневр при расхождении, на метке MZ можно выделить интервал,
182
соответствующий наименьшему допустимому значению DCPA (на рис. 7.8,в
– «жирный» отрезок).
Если «цель» представляет угрозу, две ее метки, ограничивающие В- маневр вправо и влево, попадают на линию курса судна оператора (рис. 7.8,г). Чтобы эти метки выглядели как одна, их концы, не находящиеся на пути СО, соединяются с точкой кратчайшего сближения «цели» с СО (рис. 7.8,д).
Предельное начало безопасных действий. При планировании В-
маневров необходимо знать точку на линии пути СО, изменение курса в которой на угол θ еще позволяет разойтись с опасной «целью» на дистанции
d s . Принцип определения положения предельной точки показан на рисунках 7.8,е,ж, где она обозначена соответствующим символом (рис. 7.8,з).
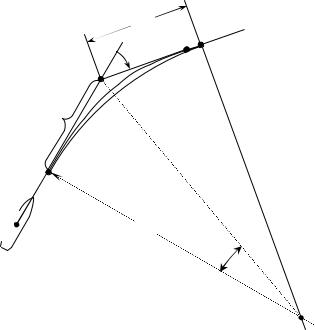
Представление криволинейных участков траектории В-маневра. На намечаемой траектории СО при В-маневре должны отображаться криволинейные участки изменения курса. При рассмотрении В-маневров
концом поворота на заданный угол θ считается точка C2 (рис. 7.9).
Sθ |
|
θ |
C2 |
CН |
Cθ |
|
|
Sθ |
|
C1 |
|
 0 R
0 R
θ/2
Рис. 7.9. К представлению траектории поворота дугой окружности
Время поворота tθ и траектория C1 C2 находятся с помощью
математической модели движения судна. На экране СПС траектория отображается своими точками или дугой окружности с радиусом
R = Sθ ctg θ2 .
На рис. 7.9 эта дуга показана пунктирной линией.
183
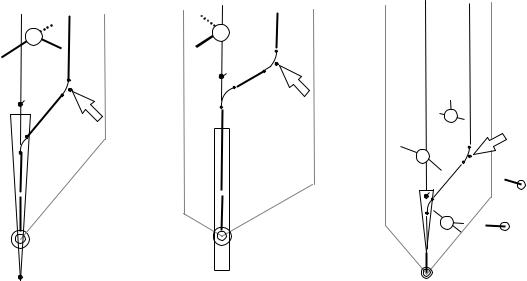
Использование меток ограничений В-маневра. На экране СПС В-
маневр задается указанием его определяющей точки курсором (рис. 7.10). «Цель» не представляет угрозы, когда планируемый путь судна оператора не пересекает метку ее ограничений на В-маневр.
Если такой путь проходит через один из концов метки, то суда разойдутся на дистанции d s . При поиске подходящего для расхождения В-
маневра должна быть возможность изменения параметров θ, d s .
Для непривилегированного судна СОНП, обязанного предпринять маневр, задаваемый угол θ (рис. 7.10,а) должен быть заметным и не приводить к излишней потере ходового времени. Начало уклонения должно находиться на отрезке «заблаговременных действий».
Маневр привилегированного судна СОП, на случай непринятия действий «целью», планируется так, чтобы начало участка уклонения не лежало на «запрещенном для маневров» отрезке пути СОП (рис. 7.10,б). Предпринимать самостоятельные действия СОП может только в тех очевидных случаях, когда бездействие или недостаточно эффективное действие «цели» может привести к столкновению. Перед этим судно оператора должно проинформировать «цель» доступными способами о том, что ситуация сближения опасная.
3
J J
в)
3
2
2
|
а) |
0 |
б) |
1 |
|
|
|
|
1 |
0 |
|
|
|
|
|
Рис. 7.10. Примеры выбора В-маневра |
0 |
||
|
|
|||
На рис. 7.10,в показан пример выбора В-маневра в ситуации с тремя «целями».
Указатель пересечения курса «цели» по носу. При планировании расхождения должно быть четкое представление о том, по носу или по корме пересекается курс «цели». При В-маневрах могут встречаться ситуации, когда при одних углах уклонения θ курс «цели» будет пересекаться по носу, а при других, - по корме (рис. 7.11).
При уклонении θ = 300 (рис. 7.11,а) судно оператора пересечет курс «цели» по носу, а при углах θ = 650 ,900 ,1200 (рис. 7.11,б,в,г) – по корме.
184
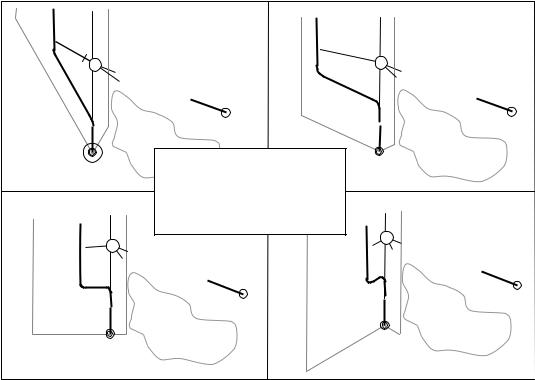
Для выделения варианта пересечения по носу на соответствующей стороне метки нанесен пересекающий ее отрезок (рис. 7.11,а).
а) б)
1 |
|
1 |
|
1 |
0 |
ds=6 кб; |
ts=18 мин; |
0 |
|
ηP=50 кб; |
ηS=10 кб; |
|
|
V=17.1 уз; V1=25.2 уз; K-K1=700; |
|
|
|
q01=730; |
D=89.6 кб; |
|
|
d =4.1 кб; |
t =21 мин; |
|
1 |
в) |
1 |
|
||
|
|
|
1 |
1 |
|
|
|
0 |
|
0 |
Рис. 7.11. Варианты расхождения с «целью»
Для рассматриваемых на рис. 7.11 случаев в табл. 7.2 приведены данные о необходимом смещении СО от линии пути для расхождения с «целью» на
d s при выборе меток В-маневров без учета и с учетом инерционности судна. Максимальная погрешность в DCPA от пренебрежения инерционностью судна соответствует В-маневру с уклонением 1200.
Таблица 7.2. - Смещение ξ влево для расхождения на d s
Пересечение курса «цели» |
По носу |
|
|
По корме |
|
||
θР |
300 |
340 |
35÷590 |
600 |
650 |
900 |
1200 |
ξ, кб (без учета инерции СО) |
24 |
43 |
>50 |
48 |
38 |
17 |
8 |
ξ , кб (с учетом инерции СО) |
24 |
43 |
>50 |
49 |
39 |
19 |
12 |
Отображение каркаса для выбора В-маневра. Совокупность меток ограничений В-маневра всеми «целями» образует в ОДМ каркас этого маневра СО. Элементы каркаса могут рассматриваться как виртуальные навигационные препятствия, через которые, как и через реальные препятствия, не должна проходить траектория СО.
Для обеспечения наглядности прокладки пути СО на ЭНК каркас В- маневра можно показывать на экране только при появлении опасной «цели» и с минимальной ОДМ. Эта ОДМ определяется границами, проходящими через концы метки опасной «цели» (рис. 7.12). Они позволяют установить, на какое минимальное расстояние надо сместиться от линии исходного курса
185