

3.КОМПЬЮТЕРНОЕ ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ «ЦЕЛЕЙ» ПО ЭХОСИГНАЛАМ РЛС
3.1.РЛС и ее технические характеристики
Вморском судовождении используются в основном обзорные импульсные радиолокационные станции [13]. Импульсный режим радиолокации заключается в периодическом узконаправленном излучении кратковременных импульсов сверхвысокой частоты (СВЧ) вращающейся антенной и в приеме ответных сигналов (эхосигналов) в промежутках между ними. Запаздывание эхосигналов относительно момента посылки импульсов СВЧ и угловое положение антенны содержат информацию о полярных координатах объектов, от которых приходят эхосигналы.
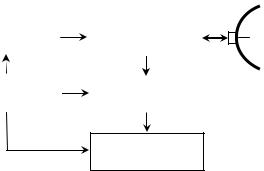
Навигационная радиолокационная станция (рис. 3.1) включает в себя синхронизатор, передатчик, приемник, индикатор, антенну и антенный переключатель.
|
Передатчик |
|
Антенный |
|
|
|
|
|
|
||
|
|
|
переключатель |
Антенна |
|
|
|
|
|
||
|
Синхронизатор |
|
Приемник |
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Индикатор
Рис. 3.1. Блок-схема РЛС
Синхронизатор с определенной частотой вырабатывает импульсы малой длительности, обеспечивающие требуемую последовательность работы блоков передатчика, приемника и индикатора РЛС.
Передатчик по сигналу синхронизатора формирует мощные СВЧ импульсы электромагнитной энергии (зондирующие импульсы - ЗИ) через антенну излучаемые в пространство. Как правило, все судовые РЛС работают в трех и десятисантиметровом диапазоне.
Антенна формирует узкий луч высокочастотной электромагнитной энергии, излучаемой в пространство. Он имеет форму лепестка, узкого в горизонтальной и широкого в вертикальной плоскости. Эта же антенна принимает энергию, отраженную объектом (эхосигнал). При излучении и приеме сигналов антенна с постоянной скоростью вращается по азимуту, обеспечивая «обзор» пространства вокруг судна.
Приемник воспринимает отраженные от объектов сигналы, преобразует и усиливает их. Затем с помощью видеодетектора выделяет однополярную огибающую (видеосигнал) преобразованных и усиленных эхосигналов. Он поступает для отображения на индикатор. Представляющими информацию
66
параметрами являются амплитудно-временные характеристики видеосигнала.
Антенный переключатель подсоединяет к антенне передатчик или приемник в зависимости от работы станции на излучение ЗИ или восприятие эхосигналов.
Основные технико-эксплуатационные характеристики судовых РЛС представлены в табл. 3.1.
Таблица 3.1 - Основные технико-эксплуатационные характеристики РЛС
№ |
Характеристика |
Обозначение |
Значение |
1. |
Длина волны излучаемого СВЧ сигнала, см |
λи |
3 (X-band) |
|
|
|
10 (S-band) |
2. |
Длительность зондирующих импульсов, мкс: |
τи |
0.5÷4.0 |
|
малые шкалы дальности |
|
|
|
средние шкалы дальности |
|
2.0÷9.0 |
|
большие шкалы дальности |
|
7.0÷12.0 |
3. |
Частота повторения импульсов, гц |
fи |
1000÷4000 |
|
малые шкалы дальности |
|
|
|
средние шкалы дальности |
|
600÷2000 |
|
большие шкалы дальности |
|
400÷1000 |
4. |
Частота вращения антенны, об/мин |
Fa |
20÷40 |
|
РЛС обычных судов |
|
|
|
РЛС высокоскоростных судов |
|
40÷60 |
5. |
Ширина диаграммы направленности антенны |
Ψг |
|
|
в горизонтальной плоскости, град. |
|
|
|
3 см (X-band) |
|
0.5÷1.5 |
|
10 см (S-band) |
|
2.0÷2.5 |
6. |
Ширина диаграммы направленности антенны |
Ψв |
15÷30 |
|
в вертикальной плоскости, град. |
|
|
7. |
Минимальная дальность, м: |
Dmin |
Не более 50 |
|
РЛС обычных судов |
|
|
|
РЛС высокоскоростных судов |
|
Не более 35 |
8. |
Максимальная дальность радиолокационного |
Dmax |
До 120 |
|
обзора, мили |
|
|
9. |
Разрешающая способность по дистанции, в |
δd |
0.7÷1.0 |
|
процентах от номинала шкалы |
|
|
10. |
Разрешающая способность по углу, град |
δγ |
Не хуже 2.5 |
11. |
Точность измерения дистанций, в процентах |
е% |
0.7÷1.0 |
|
от номинала шкалы |
|
|
При нормальных условиях распространения радиоволн, когда высота антенны над уровнем моря равна 15 м. и нет помех, РЛС должна давать четкое изображение:
-берега на расстоянии 20 миль, когда он возвышается над уровнем моря до 60 м., и на расстоянии 7 миль, когда он поднимается до 6 м;
-судов вместимостью 5000 брт. независимо от ракурса - на расстоянии не менее 7 миль;
-малых судов, длиной порядка 10 м., на расстоянии не менее 3 миль;
67

-объектов, таких как навигационные буи, с эффективной отражающей поверхностью порядка 10 кв.м., на расстоянии не менее 2 миль.
Среднетоннажные и крупнотоннажные суда обнаруживаются с помощью РЛС на расстояниях от 7 до 20 миль.
Частота вращения и угловые размеры диаграммы направленности антенны зависят от типа РЛС, а частота повторения и длительность ЗИ - от типа РЛС и используемой шкалы дальности.
Разрешающая способность РЛС по дистанции - это минимальное расстояние между двумя расположенными на одном (от СО) пеленге объектов, на котором их радиолокационные (РЛ) отметки не сливаются в одну. Эта способность зависит от многих факторов, основным из которых является длительность ЗИ. Потенциальной называют разрешающую способность по дистанции, определяемую только длительностью зондирующего импульса
δD = 0.5 c τи,
где с - скорость распространения радиоволн.
Разрешающая способность РЛС по пеленгу представляет собой минимальный угол δΠ между пеленгами двух расположенных на одинаковом
(от судна оператора) расстоянии объектов, на котором их РЛ-отметки не сливаются в одну. Такая способность зависит от многих факторов, основным из которых является ширина диаграммы направленности антенны в горизонтальной плоскости. Потенциальной считают разрешающую способность по пеленгу, определяемую только шириной диаграммы направленности антенны в горизонтальной плоскости.
Потенциальной зоной разрешения РЛС называется почти прямоугольная область, одна стороны которой равна δD , а вторая δL соответствуют потенциальной разрешающей способности по пеленгу:
δL = 2 D tg δ2Π = 2 D tg Ψ2г ,
где D - расстояние зоны от судна оператора.
Для τи =0.3 мкс, Ψг =1.00 и D =3 мили размеры потенциальной зоны разрешения составляют: δD =45 м, δL =93 м.
3.2. Характеристика эхосигналов РЛС
Особенности эхосигналов рассматриваются на примерах, в которых:
•шкала дальности - 6 миль;
•размер диаграммы направленности антенны в горизонтальной плоскости -
Ψг =1.00;
68
•частота вращения антенны - Fa =20 об/мин;
•длительность зондирующих импульсов передатчика - τи=0.3 мкс;
•частота повторения ЗИ - fи=1200Гц.
РЛ-информация об окружающих судно объектах получается в результате зондирования пространства при вращении антенны [13]. Так как
приняты Fa =20 об/мин, fи=1200 Гц, то нетрудно установить, что
пространство в рассматриваемом случае зондируется через каждые 6' поворота антенны. Эхосигнал считается соответствующим осевой линии диаграммы направленности антенны в момент излучения ЗИ. Совокупность видеосигналов при нескольких последовательных посылках ЗИ, отвечающая облучаемому объекту, называется его РЛ-отметкой или РЛ-образом.
При решении задач судовождения с помощью РЛС находят дистанцию до объекта и направление на него. В основу определения дистанции D положена ее зависимость от интервала времени t между моментами посылки ЗИ и прихода эхосигнала от объекта:
D = c t / 2;
где c - скорость распространения радиоволн.
Направление на объект находится регистрацией углового положения антенны в момент прихода эхосигнала от него.
Среди объектов РЛ-наблюдения различают точечные, сосредоточенные и протяженные. Такая классификация обычно производится в зависимости от площади потенциальной зоны разрешения радиолокатора.
Кточечным относятся РЛ-объекты, размерами отметок которых можно пренебречь по сравнению с потенциальной зоной разрешения РЛС.
Сосредоточенными считаются объекты, имеющие отметки, соизмеримые по размерам с этой зоной.
Протяженными являются объекты, у которых хотя бы один из размеров их отметки значительно превышает стороны потенциальной зоны разрешения.
Кточечным объектам в основном относятся плавучие знаки навигационного ограждения и малые суда. Среднетоннажные и крупнотоннажные суда обычно принадлежат к сосредоточенным объектам. Острова, берега являются протяженными РЛ-объектами [17].
Когда нет помех распространению и приему радиоволн, то при единичном облучении точечного объекта его видеосигнал повторяет огибающую зондирующего импульса (рис. 3.2,а). В этом идеализированном случае линейная временная развертка выходного сигнала приемника РЛС
будет иметь вид, показанный на рис. 3.2,б, где UBC - амплитуда
видеосигнала. Отстояние t по времени от момента посылки ЗИ отметки точечного объекта характеризует дистанцию до него.
69
В действительности на видеосигналы влияют помехи среды распространения, от подстилающей поверхности, шумы на входе приемника и в самом приемнике. Поэтому на выходе приемного устройства РЛС всегда будет обусловленная помехами составляющая, которая искажает полезный сигнал. Соотношений сигнал-помеха в выходном сигнале приемника очень много. При тихой ясной погоде, когда преобладающими из помех в выходном сигнале приемника являются его шумы, временная развертка реального выхода приемного устройства РЛС после одного облучения точечного объекта будет подобна представленной на рис. 3.2,в.
Для различия реальных видеосигналов от идеального их представления наряду с термином «РЛ-отметка объекта» используется понятие «идеальная РЛ-отметка», под которой понимается отображение объекта в выходном сигнале РЛС при условии полного отсутствия помех.
UСВЧ
τи |
СВЧ зондирование |
|
|
а) |
|
|
|
t |
UВС |
τи |
б) |
|
t |
|
|
t |
|
|
|
UВС
в)
t
Рис. 3.2. Видеосигнал точечного объекта при одном его облучении
б) идеальный в) реальный
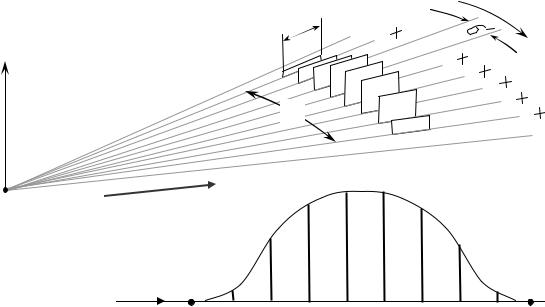
Рассмотрим интерпретацию идеальной РЛ-отметки точечного объекта. Так как диаграмма направленности антенны в горизонтальной плоскости имеет определенную ширину, то в одном обзоре при прохождении луча РЛС точечный объект облучается многократно. Количество ЗИ, отражаемых от точечной «цели» при одном обороте антенны, можно посчитать по формуле:
Nобл = Ψг fи / (6 Fa ) .
Например, когда Ψ =1.00, |
F =20 об/мин, |
f |
и |
=1200 Гц, при |
г |
a |
|
|
прохождении луча антенны точечный объект будет облучен 10 раз. В результате ему на выходе приемника будет соответствовать пачка из десяти импульсов, следующих через период посылки. Эта пачка и представляет собой идеальную РЛ-отметку точечного объекта.
70
|
|
|
Пел |
|
|
|
|
|
τи |
s s |
1 |
|
ен |
г |
|
|
|
|
|
|
|
|
||||
|
4 |
|
|
|
|
|
||
UBC |
|
s |
5 |
|
|
|
|
|
|
|
|
s |
|
6 |
|
|
|
а) |
|
|
|
s |
|
7 |
||
|
|
|
|
s |
||||
ΨГ |
|
|
|
|
|
|
s |
8 |
|
|
|
|
|
|
|
|
s+9 |
t
Момент посылки ЗИ
б)
Пеленг
s |
s+1 s+2 |
s+7 s+8 s+9 |
Рис. 3.3. Интерпретация идеальной РЛ отметки точечного объекта
Поскольку эхосигналы соответствуют определенным направлениям осевой линии антенны, то интерпретировать идеальную РЛ-отметку точечного объекта можно, используя последовательные радиальновременные развертки выхода приемника, как показано на рис. 3.3,а, где s - номер посылки одного из ЗИ. Огибающая по амплитуде пачки импульсов идеальной отметки точечного объекта соответствует конфигурации диаграммы направленности антенны (рис.3.3,б). Протяженность идеальной РЛ-отметки точечного объекта вдоль развертки (по росту дистанции) равна
τи, а по азимуту (по ширине) - Ψг .
Идеальная РЛ-отметка сосредоточенного объекта больше по размерам образа точечного объекта, как по дистанции, так и по ширине. Импульсы идеальной пачки от сосредоточенного объекта отличаются друг от друга не только амплитудой, как у точечного, но также длительностью и формой.
Реальные РЛ-отметки объектов - это искаженные влиянием помех их идеальные отметки, вследствие чего их опознание и уверенное определение размеров затруднены. Помехи приемника РЛС являются шумовыми и имеют приблизительно одинаковую интенсивность по всему полю обзора. Помехи от дождя могут быть похожими на шум приемника, либо образовывать протяженные по пеленгу и дальности отметки. Помехи от низких облаков образуют значительные по размерам отметки с нечетко выраженными краями. Помехи от взволнованной поверхности моря представляют малые либо протяженные по пеленгу отметки, которые иногда трудно отличить от РЛ-образа буя или небольшого судна. С увеличением расстояния интенсивность этих помех уменьшается, а от обзора к обзору случайным образом меняются координаты и величина.
71