

8) Находится промежуток времени от текущего момента, через который судно оператора, инициирующее маневр в точке A, окажется в точке Z на
кратчайшем расстоянии d = d s от «цели»
tz = tA +τM +tμ. |
(9.11) |
9.4. Приближенное решение задачи второго типа
Решения рассматриваемой задачи и задачи первого типа аналогичны.
KJ BJ |
АJ |
А̃J |
|
|
|
kø |
|
J |
J |
|
|||
|
KØ |
|
d |
rγ |
||
|
|
|
|
rδ |
||
|
|
|
|
γ |
||
|
|
|
|
|
||
|
C̃ |
|
|
|
|
|
S |
|
|
ds |
|
r с γ |
|
|
|
|
|
|
|
B |
а) |
b |
z |
|
kμ |
|
sγ |
sr |
с̃ |
||||
SM |
|
|
SB |
|
s |
δ |
se |
|
А |
|
||
|
а |
|
sδ |
|
|
А̃ |
|
||
|
ã |
|
|
|
|
|
|
|
|
SÃ |
|
KØ sã |
|
б) |
|
|
|
0 0
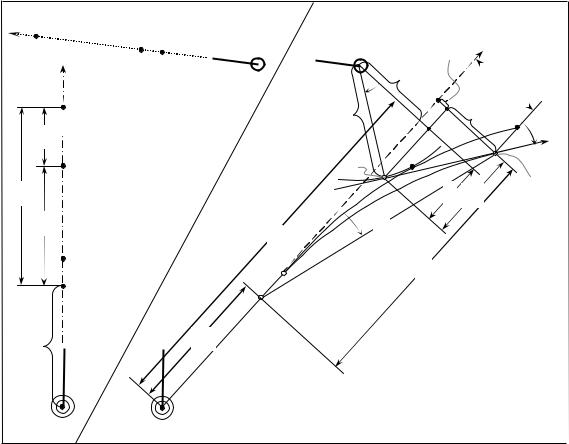
Рис. 9.2. Пояснение к приближенному решению
Здесь также считается, что если выбранный маневр начинается в предельной точке, то в момент его окончания расстояние кратчайшего сближения с «целью» (при условии дальнейшего движения СО постоянным
курсом KШ и скоростью VM ) должно быть равно dμ = d s . Однако в отличие
от задачи первого типа в рассматриваемом случае СРА соответствует отрицательное значение времени tμ кратчайшего сближения.
Алгоритм приближенного расчета предельного начала маневра характеризуется схемами перемещения судна оператора относительно грунта (рис. 9.2,а) и относительно «цели» (рис. 9.2,б).
208
~A =VШ tA .
S
9) По координатам текущего места судна оператора, его курсу KШ и |
|
~ |
~ |
значению SA вычисляются координаты точки |
A . |
10) Определяется промежуток между текущим значением времени и моментом, в который судно оператора будет на кратчайшем расстоянии d ≈ d s от «цели»
tz ≈ tA +τM −tμ . |
(9.16) |
Погрешность приближенного метода. На рисунке 9.2,б точечной линией представлена относительная траектория СО с началом a и концом c ,
движение по которой приводит к расхождению с «целью» на дистанции d s . Моменту кратчайшего сближения на этом пути соответствует позиция z . Это
точка касания относительной траектории СО и окружности радиуса d s с центром в месте «цели».
Расстояние между начальными точками |
a |
~ |
точечной и a сплошной |
||
траектории (в истинном движении это отрезок |
|
~ |
AA ) является погрешностью |
||
расчета приближенным методом.
9.5. Строгое решение задачи второго типа
Алгоритм строгого расчета поясняется рисунком 9.3. Траектория судна оператора при маневре на схеме истинного (рис. 9.3,а) и относительного (рис. 9.3,б) движения показана сплошной линией. Граница безопасных маневров скоростью отмечена соответственно точками A и a . Положение
судна оператора и «цели» на момент кратчайшего сближения d s на схеме истинного перемещения судов обозначено Z и ZJ , а на схеме
относительного движения отвечающее этому моменту место СО отмечено буквой z .
Принцип определения предельной точки начала изменения V .
Нахождение точки A сводится к расчету интервала времени τz между моментами начала маневра и прихода СО в точку Z (см. рис. 9.3,а).
Для получения решения этой задачи выбирается функция f (τ) , которая
при τ = τz обращается в ноль. При таком условии τz |
находится как корень |
уравнения |
|
f (τ) = 0 . |
(9.17) |
210
