

7. ИСПОЛЬЗОВАНИЕ ДЛЯ РАСХОЖДЕНИЯ В-МАНЕВРОВ
7.1. Принцип формирования зон для выбора В-маневров
Типичным действием по расхождению является В-маневр. Его схема с пренебрежением и с учетом инерционности судна показана на рисунках 1.4 и 1.5. В-маневр должен выбираться с учетом ограничений, накладываемых на него «целями». Совокупность в ОДМ меток ограничений от всех «целей» называется каркасом В-маневра. С его помощью находятся значения параметров В-маневра, при которых он соответствует целям расхождения.
В этом параграфе рассматривается принцип построения элементов, отражающих ограничения «целей» на В-маневры судна оператора, когда инерционность СО не учитывается [5]. Эти элементы могут быть двух видов:
−зоны опасных при В-маневре позиций судна оператора по отношению к «целям» (отвечающая СЦJ зона опасности обозначается ЗОJ).
−метки ограничения В-маневра (МОМ) «целями» (см. параграф 6.4). При характеристике В-маневра используются обозначения:
KШ - исходный курс судна оператора;
KP = KШ−θ - курс уклонения влево;
KS = KШ+θ - курс уклонения вправо.
Угол θ может задаваться от 100 до 1500. По умолчанию он принимается
равным рациональному для расхождения в данных условиях значению θr .
Область движения и безопасных В-маневров (ОДМ) задается шириной
(ξP , ξS ) левой и правой полос допустимых смещений СО от исходной
линии пути (с учетом навигационных ограничений акватории). Начало полосы допустимых смещений вправо образует отрезок 0G на курсе
уклонения KS , который для одной из ситуаций сближения судов показан на рис. 7.1, где изображение ориентировано по KШ. Если бы отображалась и левая полоса допустимых смещений, то ее торцевой отрезок был бы направлен вдоль курса KP .
Текущее место 0 судна оператора считается опорным элементом обоих полос допустимых смещений. На экране САРП и НИС можно показывать одну из этих полос или обе вместе. Второй вариант предпочтительнее, так как позволяет намечать В-маневры в обе стороны.
Принцип построения ЗО [5] для ситуации пересечения курсов характеризуется в правой для В-маневра полосе на рис. 7.1, где обозначено:
V , KШ - скорость оперирующего судна и его курс перед маневром; KJ , VJ - курс и скорость «цели» J ;
kш, uш и ks , us - курс и скорость относительно «цели» судна оператора, следующего относительно грунта соответственно курсами KШ и KS ;
170
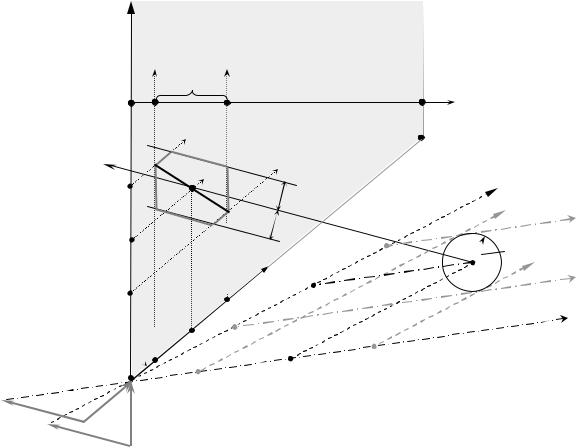
A1, A2 – точки поворота с курса KШ на курс KS для расхождения с
«целью» на дистанции d s ;
B1, B2 – точки возвращения с курса KS к прежнему курсу KШ для
расхождения с «целью» на дистанции d s ;
MnpZqr – зона опасных позиций судна оператора при В-маневре по отношению к «цели» J ;
MZ – метка ограничения В-маневра «целью» J ; |
|
|
|
|
|||||||||
Q , A0 , B0 |
– центр ЗО и точки поворота с курса KШ на курс KS и |
|
|||||||||||
возвращения с курса KS |
к прежнему курсу KШ для сближения с |
||||||||||||
«целью» вплотную; |
|
|
|
|
|
|
|
|
|||||
a0 , a1, a2 и b0 , |
b1, b2 – точки на линиях относительного движения судна |
||||||||||||
оператора, соответствующие точкам A0 , A1, |
A2 и B0 , B1, B2 ; |
|
|||||||||||
ξ - интервал смещений от планового пути, приводящих к чрезмерному |
|||||||||||||
сближению с «целью». |
|
|
|
|
|
|
|
|
|||||
|
|
KØ |
|
Правая полоса допустимых |
|
|
|
|
|||||
|
|
|
|
|
|
|
смещений |
|
|
|
|
||
|
|
|
|
K |
ξ |
K |
|
ξS |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ξ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ξ1 |
|
ξ2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
KJ |
|
n |
KS |
p |
|
KS |
|
|
G |
|
||
|
|
M |
Q |
|
|
|
|
||||||
|
|
A2 |
|
|
|
|
d |
s |
|
|
kø |
|
|
|
|
|
r |
|
|
|
|
|
kø |
ks |
|||
|
|
|
|
|
Z |
|
|
|
|||||
|
|
|
|
|
q |
ds |
|
|
|
|
|
||
|
|
A0 |
|
|
a2 |
|
|
ds |
|
||||
|
|
|
B2 KS |
|
|
kø |
|||||||
|
|
A1 |
|
|
|
a0 |
|
|
J |
ks |
|||
|
|
|
|
B0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ B1 |
|
a1 |
|
|
|
|
|
ks |
|
us |
0 |
|
|
b0 |
b2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
b1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VJ |
uø |
V |
|
V |
|
|
|
|
|
|
|
|
|
|
Рис. 7.1. Схема построения зоны опасности |
||||||||||||
|
|
||||||||||||
|
VJ |
|
|
|
|
|
|
|
|
|
|
|
|
Расстояния |
SAi и SBi |
|
(i = 0, 1, 2) от текущей позиции |
0 судна |
|||||||||
оператора до точек A0 , |
A1, A2 |
|
и B0 , B1, B2 определяется по необходимому |
||||||||||
для прихода в них времени tAi |
|
и tBi . Оно рассчитывается по относительным |
|||||||||||
171
расстояниям sai , sbi (0a0 , 0a1, 0a2 и 0b0 , 0b1, 0b2 ) и значениям скорости
uш, us :
tAi = sai / uш, tBi = sbi / us , SAi =V tAi , SBi =V tBi . |
(7.1) |
Строго положение точек контура ЗО получается по времени движения СО от текущего места до сближения на d s с «целью» при В-маневре в интервале ξ . Однако этот способ не удобен при реализации.
В общем случае упрощенная ЗО представляет собой область пересечения четырех полос, три из них назовем образующими, а четвертую – лимитирующей [5]. Последней является правая или левая допустимая для В- маневров полоса. Она влияет на образованный первыми тремя полосами контур ЗО, когда он выходит за ее пределы.
Образующие ЗО три полосы имеют границы, параллельные линиям
курсов: |
KJ , |
KШ, |
KS |
или |
KP . Границы первой из этих полос отстоят от |
|
линии |
KJ |
на |
расстоянии d s . Положение |
границ второй полосы |
||
определяется точками |
B1 и |
B2 , а третьей – A1, |
A2 . Расстояния от СО до |
|||
точек A1, A2 и B1, B2 вычисляются по формулам (7.1). Центр ЗО (на рис. 7.1
-точка Q ) находится на одинаковом расстоянии от границ каждой из полос.
Вотдельно рассматриваемых правой и левой области допустимых В- маневров контур ЗО судна оператора может быть шести-, четырех- и пятиугольником.
Некоторые из ЗО представлены на рис. 7.2, где kш, ks , k p - курс
относительно «цели» судна оператора, когда оно следует относительно грунта соответственно курсами KШ, KS , KP . В случаях А, Б, В пределы
области допустимых В-маневров не влияют на ЗО, в отличие от случаев Г, Д. На рис. 7.2, Е, Ж показаны ЗО опасной по d -критерию «цели» при совместном отображении правой и левой полос допустимых смещений [5].
Анализируя схемы на рис. 7.1, 7.2 можно сделать ряд выводов:
-При отсутствии маневров «цели» и судна оператора, или при его движении на курсе уклонения, положение ЗО относительно грунта не изменяется со временем (если она остается от линии курса K , проходящего через текущее место судна, с той стороны, куда оно уклоняется).
-При постоянных значениях K , V , KJ , VJ с ходом времени ЗО со скоростью V сближается с торцевой границей ОДМ и через определенное время уйдет из ОДМ.
-Величина ЗО пропорциональна d s , причем соответствующие разным d s контуры зон опасности являются концентричными.
172
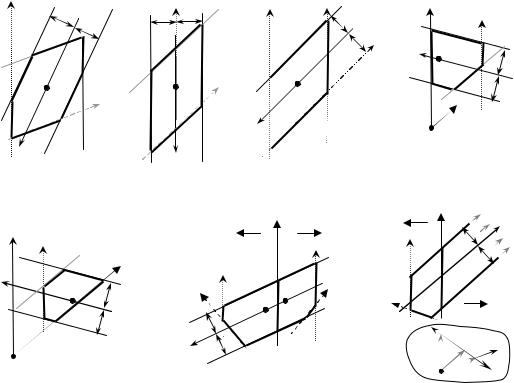
-У опасной по d-критерию «цели», когда курсы kш, ks (или kш, k p )
одинаковы или противоположно направлены, зона опасности бесконечна (рис. 7.2, Ж). Это означает, что при заданном угле θ любое смещение ξ
приводит к опасному сближению с «целью».
- При малых углах между курсами kш, ks (или kш, k p ) величина ξ
становится слишком большой. Это является признаком необходимости назначения более подходящего угла θ.
KØ |
d |
s |
|
KØ ds |
|
|
|
KØ |
ds |
KØ |
|
|
|
|
ds |
|
|
ds |
|
|
|
|
ds |
KS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
KJ |
|
|
|
ds |
|
|
|
|
|
|
|
KS |
|
|
|
|
|
|
||
|
KS |
|
|
|
KJ |
|
|
|
|
|
|
ds |
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
0 |
KS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KJ |
|
|
|
KJ |
|
|
|
|
|
Г) Линия КJ пересекает |
||||
|
|
|
|
|
|
|
|
|||||||
А) Линия КJ пересекает Б) Линии КJ |
и KØ |
В) Линии КJ и КS |
линии KØ и КS, d <ds на |
|||||||||||
|
курсе К |
|
|
|||||||||||
линии KØ и КS, dt |
>ds |
|
параллельны, |
параллельны, d >ds |
|
|
|
|
|
|||||
|
|
|
|
d >ds |
|
|
KØ |
|
|
KØ |
|
|
KJ |
|
|
|
|
|
|
|
|
|
(-θ) |
|
|
||||
KØ |
|
|
|
|
|
|
(-θ) |
(+θ) |
ds |
|
|
|||
|
KS |
|
|
|
|
s |
|
|
||||||
KJ |
|
|
|
|
|
|
|
|
|
d |
|
|
||
|
|
|
KP |
|
|
|
|
|
|
|
||||
|
|
|
|
|
KS |
|
|
|
|
|
||||
|
|
d |
s |
|
|
KP |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
(+θ) |
|
|||
|
|
ds |
|
d |
s |
|
|
|
|
|
||||
|
|
|
|
|
|
kø |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
KS |
|
|||
|
|
|
|
KJ |
|
ds |
|
|
|
|
|
|
||
C |
|
|
|
|
|
|
|
V VJ |
|
|
||||
Д) Линия КJ пересекает |
Е) Линия КJ пересекает |
0 |
V |
|
ks |
|
||||||||
|
|
|
||||||||||||
линии KØ и КS, |
d <ds на |
линии KØ , КS и KP, d <ds |
Ж) Линия kø и линия ks |
|||||||||||
курсе КS |
|
|
|
|
|
|
|
|
параллельны, d <ds |
|||||
Рис. 7.2. Виды зон опасных позиций СО
По рисунку 7.1 видно, что для выбора В-маневра достаточна метка его ограничения «целью». Такая метка позволяет установить:
•на каком отрезке планового пути (на рис. 7.1 − отрезок A1 A2 ) поворот на курс уклонения сопровождается чрезмерным сближением с «целью»;
•на каком отрезке на линии уклонения (на рис. 7.1 − отрезок B1 B2 ) возвращение на прежний курс приводит к d ≤ d s .
Ниже при выборе для расхождения В-маневра рассматриваются только
метки его ограничений «целями».
7.2. Упрощенный расчет положения метки ограничения В-маневра
Упрощение заключается в предположении, что повороты судна происходят мгновенно. МОМ рассматривается в ориентированной по норду
173
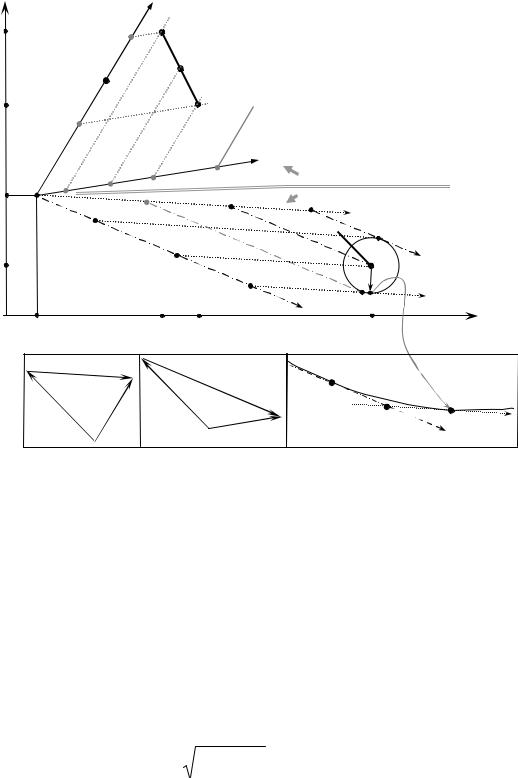
системе координат XOY для уклонения судна оператора вправо. При изменении курса влево алгоритм вычислений такой же. Для получения расчетных зависимостей используется ситуация рис. 7.1, показанная на рис. 7.3 с ориентацией по норду.
Y |
|
KØ |
|
|
|
|
|
|
YM |
|
A2 |
M |
|
|
|
|
|
|
A0 |
|
|
|
|
|
|
|
YZ |
|
|
|
Z |
|
|
|
|
A1 |
|
|
|
|
|
|
a) |
|
|
B0 |
B2 |
G |
KS |
|
|
||
0 B1 |
|
Истинное движение СО |
||||||
|
|
|||||||
|
|
|
||||||
Y0 |
|
|
a1 |
a0 |
|
Относительное движение СО |
||
|
b1 |
|
|
a2 |
kø m |
б) |
||
|
|
|
|
|
||||
YJ |
|
|
b0 |
|
|
|
ds J |
ks |
|
|
|
|
|
|
|||
|
|
|
|
b2 |
|
kø |
||
|
|
|
|
|
ks |
z p |
||
X0 |
|
|
XM |
XZ |
|
|
XJ |
X |
|
uø |
|
|
us |
|
|
|
|
|
|
|
|
|
|
|
p |
|
VJ |
V |
VJ |
|
|
|
z |
||
|
|
|
|
|||||
в) |
|
|
V |
д) |
ks kø |
|||
|
|
г) |
|
|
||||
Рис. 7.3. К расчету координат метки ограничения маневра
Метка ограничения «целью» В-маневра полностью определяется координатами своих концов. Для их нахождения выполняются следующие операции.
1) Определяется курс kш и скорость uш судна оператора относительно
«цели», при условии что курс СО равен исходному значению. Расчет производится по формулам
uшx =V sinKШ−VJ sinKJ |
(7. 2) |
|||||||
|
|
|
|
|
|
|
, |
|
uшy =V cosKШ−VJ cosKJ |
|
|||||||
u |
|
= |
u |
2 |
+u |
2 |
|
|
ш |
шx |
шy |
|
(7. 3) |
||||
|
|
|
|
, |
||||
|
|
|
|
|
|
|
|
|
kш = arcsin(uш / uш) x |
|
|||||||
174
где uшx , uшy - составляющие скорости uш, по осям OX , OY .
Выражения (7.2), (7.3) связывают элементы треугольника, показанного на рис. 7.3,в.
2)Рассчитываются относительный курс ks и скорость us судна оператора при условии его движения по линии уклонения. Значения ks и скорость us находятся из треугольника на рис. 7.3,г. Решение производится по формулам (7.2), (7.3), в которых вместо KШ берется KS .
3)Находится время tA0 , tB0 следования судна оператора от точки 0 соответственно до точек A0 (по линии курса KШ) и B0 (по линии курса KS )
(см. рис. 7.3,а). Значения tA0 , tB0 являются корнями линейной системы уравнений
usxtB0 +uшxtA0 = X J − X0 |
|
|
|||||||||
u |
t |
B0 |
+u |
шy |
t |
A0 |
=Y |
−Y |
|
. |
(7.4) |
|
sy |
|
|
J |
0 |
|
|
|
|||
Эта система получается при записи составляющих по осям OX , OY |
|||||||||||
(см. рис. 7.3,б) относительного |
перемещения |
судна |
оператора по пути |
||||||||
0,b0 ,J для сближения с «целью» вплотную.
|
4) Определяется время tB2 |
следования судна оператора от места 0 до |
|||||||||||||||||||||||||
точки B2 (по линии курса KS ) и время τA движения курсом KШ от позиции |
|||||||||||||||||||||||||||
B |
до точки кратчайшего |
|
|
сближения |
с |
«целью» на дистанции d s . |
|||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметры tB2 , τA находятся из системы уравнений |
|
|
|
|
|
||||||||||||||||||||||
|
u |
|
|
t |
|
|
|
+u |
|
|
τ |
|
= X |
|
− X |
|
+ d |
s |
cosk |
|
|
|
|||||
|
sx |
B2 |
шx |
A |
J |
0 |
|
|
|
(7.5) |
|||||||||||||||||
|
|
|
|
|
|
|
|
−Y |
−d s sink |
|
ш , |
||||||||||||||||
|
u |
sy |
t |
B2 |
+u |
шy |
τ |
A |
=Y |
|
ш |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
J |
|
0 |
|
|
|
|
|
|
|||||||||||
|
Эта система отражает (см. рис. 7.3,б,д) составляющие относительного |
||||||||||||||||||||||||||
пути |
0,b , p судна оператора для расхождения с «целью» на расстоянии d s |
||||||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и окружности радиусом d s ). |
||||||||||
(где p - точка касания линии курса kш |
|
||||||||||||||||||||||||||
|
5) Рассчитываются интервалы времени tA1 , tA2 |
и tB1 следования судна |
|||||||||||||||||||||||||
оператора от места 0 соответственно до точек A1, |
A2 |
|
(курсом |
KШ) и до |
|||||||||||||||||||||||
точки B1 (курсом KS ) |
|
|
|
|
|
|
|
|
|
|
= tB2-tB0 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
tb |
|
|
|
|
|
|
|
|
(7.6) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tb us |
|
|
, |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
ta |
= |
/ uш |
|
|
|
|
|
|
|
|||||||
175
tA1 |
= tA0 − |
ta |
|
tA2 |
= tA0 + |
|
(7.7) |
ta , |
|||
tB1 = tB0 − |
|
|
|
tb |
|
||
6) Вычисляется время движения СО на курсе уклонения от точки 0 до позиции G (границы области движения и маневра)
tBG = ξS /(V sinθS ).
7) Анализируются значения tA1 , tB1, tA2 , tB2 для установления, находится ли МОМ в пределах области движения и маневра СО.
Если {tA1 < 0 и tA2 < 0 } или {tB1 < 0 и tB2 < 0 } или {tB1 > tBG и tB2 > tBG }, то МОМ ОДМ.
Если {tA1 , tB1, tA2 , tB2 больше нуля} и {tb1 , tb2 меньше tBG }, то МОМ ОДМ.
При выполнении второго условия рассчитываются координаты концов метки (см. рис. 7.3,а) по формулам
X |
M |
= X |
|
+V t |
B1 |
sinK |
S |
+V t |
A2 |
sinK |
|
(7. 8) |
|||
|
|
0 |
|
|
|
|
Ш , |
||||||||
YM =Y0 |
+V tB1 cosKS +V tA2 cosKШ |
|
|||||||||||||
X |
Z |
= X |
|
+V t |
B2 |
sinK |
S |
+V t |
A1 |
sinK |
|
(7.9) |
|||
|
|
|
0 |
|
|
|
|
|
|
Ш . |
|||||
YZ =Y0 |
+V tB2 cosKS +V tA1 cosKШ |
|
|||||||||||||
Еще три условия, определяющие положение метки в ОДМ, приведены на рис. 7.4,а,б,в для В-маневра в правую сторону. Координаты концов метки в этих случаях также вычисляются по формулам (7.8), (7.9).
Небольшое изменение вносится для опасной по d-критерию «цели», метка которой находится на линии пути судна оператора (см. рис. 7.4,а). В этом случае, так как рассматривается смещение вправо, то находящаяся слева от линии курса часть MA метки не должна отображаться и браться во внимание при выборе В-маневра вправо.
176