10. ОТОБРАЖЕНИЕ СИТУАЦИЙ ДЛЯ ВЫБОРА СРОЧНЫХ МАНЕВРОВ РАСХОЖДЕНИЯ
10.1. Ситуации, требующие немедленных действий для предупреждения столкновения
Разойтись судам особенно сложно, когда они чрезмерно сблизились и требуются незамедлительные меры для избежания столкновения. Такие ситуации характеризуются следующими признаками [8]:
-движение неизменным курсом и скоростью приводит к столкновению;
-оставшееся до столкновения время t мало, что требует незамедлительных мер;
-не действуют правила, регламентирующие обычное расхождение;
-предотвращение столкновения может быть достигнуто только «сильным» маневром;
-вероятность маневра опасной «цели» велика.
Когда оба сближающихся судна предпринимают действия для расхождения, то маневр одного судна, улучшающий результаты маневра другого судна, называется содействующим, а маневр, ухудшающий эти результаты, – противодействующим.
Аспекты определения срочных мер для расхождения рассмотрены, например, в литературе [23, 31, 32, 35], но в общей постановке эта задача не решена. Обстоятельства и условия характеризуемых ситуаций настолько разнообразны, что исчерпывающие рекомендации невозможны. Сам факт чрезмерного сближения судов говорит о серьезном нарушении МППСС-72 обоими судами, или об ошибках в выбранных для расхождения действиях одного из них.
Обычно интервал срочных действий выделяют во времени, оставшемся
до столкновения с «целью». Если обозначить его границы tu , tc , можно записать условие, когда необходимы срочные меры
Граница tc в этом условии отмечает момент, после которого столкновение уже невозможно предотвратить. В этих случаях судоводитель действует в соответствии с процедурами, относящимися к чрезвычайным ситуациям. Объявляет общесудовую тревогу и предпринимает маневр, который уменьшит последствия столкновения. Повреждения будут минимальными, если удар придется по носовой части корпуса впереди таранной переборки. При приближении «цели» слева по носу неудачным маневром является поворот вправо.
216
Корректно выбранный маневр, начатый в момент tc , еще обеспечивает безопасное расхождение. Это действие называют маневром последнего момента [23]. Во многом он зависит от поведения «цели» и должен содействовать предпринимаемым ей мерам.
Время (или расстояние) до точки столкновения, определяющее начало маневра последнего момента, четко определить невозможно, так как оно зависит от многих факторов. Поэтому его оценивают приближенно.
J |
KØ |
|
qJ0 |
δK |
|
|
C |
DС |
KJ |
|
|
SС |
|
q0J |
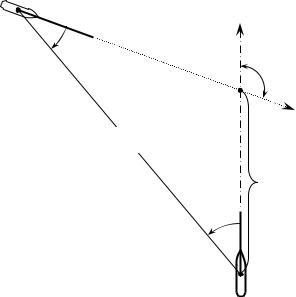
Рис. 10.1. К характеристике |
0 |
границы срочного маневра |
|
Например, нередко границей tc берут время t90 поворота судна оператора с предельной перекладкой руля на угол 900. Этому времени
соответствует расстояние S C от судна оператора до |
точки C |
предполагаемого столкновения c «целью» (рис. 10.1) |
|
SC =V t90 . |
(10.2) |
На рисунке 10.1 обозначено: |
|
q0J , qJ 0 - соответственно курсовой угол и ракурс «цели», |
|
δK - угол между линиями курсов судов. |
|
Зная SC , можно определить граничную дистанцию DC между судами, которая также может служить критерием маневра последнего момента
D |
C |
= S |
C |
|
sinδ |
K . |
(10.3) |
|
|
|
|
|
|
|
|
sinqJ 0 |
|
Границей срочного маневра принимают и значение SC равное четырем длинам судна
Различие между показателями (10.2) и (10.4) не очень велико. Согласно требованиям Резолюции ИМО MSC.137(76) к маневренным качествам судов выдвиг на циркуляции с предельной кладкой руля не должен превышать 4,5L , где L - длина судна. Поэтому расстоянию до точки кратчайшего сближения 4L соответствует время поворота приблизительно на 900.
Профессор С.Горски (Морской университет, Гдыня, Польша) рекомендует учитывать в показателе (10.4) скорость судов и принимать
SC = 0,4 L |
v vJ , |
(10.5) |
10 узл. приV <10 |
узл |
|
vJ |
10 узл. приVJ <10 |
узл |
|
где v = |
узл |
; |
= |
узл. приVJ ≥10 |
узл |
. |
V узл. приV ≥10 |
|
|
VJ |
|
Значению SC соответствует граница tc |
|
|
|
|
tc = SC / V . |
|
(10.6) |
Вторую границу tu интервала срочных мер также установить затруднительно. Иногда продолжительность этого интервала считают равной одной минуте. В этом случае
Действия по расхождению с судном, предпринимаемые в эту минуту,
называются маневрами последней минуты (Last minute manoeuvres).
В ситуациях чрезмерного сближения судов целесообразна информационная помощь со стороны компьютера. Здесь допустимо для избежания непосредственной угрозы столкновения и автоматическое выполнение маневра. Однако перед этим СПС должна представить рекомендуемое действие и уведомить, что будет его предпринимать. Если судоводитель не отменит рекомендации СПС в течение порядка 30 с., то маневр выполняется автоматически.
Естественно, компьютерная помощь возможна только тогда, когда в системе имеются данные о размерах и элементах движения другого судна. Они могут поступать по линии АИС. Если же этих данных нет, то меры для избежания аварии принимаются судоводителем на основе визуальной оценки ситуации. Их эффективность напрямую зависит от подготовленности
218
судоводителя. Большое значение в этом вопросе имеет тренажерная подготовка по действиям в чрезвычайных ситуациях.
Для выработки системой на основе данных АИС рекомендаций по срочному маневрированию для избежания непосредственной опасности столкновения предложено ряд методов. Учитывая, что в рассматриваемых случаях не действуют правила, регулирующие обычное расхождения, особого внимания заслуживает метод прецедентов (CBR), представленный в параграфе 6.6. Для его реализации создается база образцов расхождения в критических ситуациях. Ее содержимое должно охватывать представительное число вариантов чрезмерного сближения судов. После определения таких ситуаций образцы их разрешения отрабатываются экспертами на тренажерах и вносятся в память системы. На основе таких прецедентов осуществляется поиск решения по устранению непосредственной угрозы столкновения при возникновении ее в практической деятельности.
В этой главе (при условии, что данные о встречном судне поступают по линии АИС) внимание уделяется виду представления информации, облегчающему оператору принятие правильного решения при непосредственной угрозе столкновения.
Неотложный маневр расхождения, рассчитываемый без учета динамики судна, а в ряде случаев и таких особенностей, как падение скорости при изменении курса и разная поворотливость вправо и влево, вряд ли будет эффективным. Анализируя предложенные для определения срочных маневров математические процедуры [23, 31, 35], можно заметить, что динамика судов в них учтена недостаточно полно. Такое обстоятельство объясняется объективной причиной – еще до недавнего времени мощности компьютеров было недостаточно для получения в реальном времени прогнозов маневров судов по моделям, адекватным реальному процессу. На современном этапе это возможно.
При решении поставленной задачи ниже используется адекватная имитационная математическая модель. По ней получаются массивы данных, отражающие процессы протекания любых маневров судна, в том числе циркуляций влево и вправо с предельной перекладкой руля и торможения до остановки работой машины на полный ход назад. В рассматриваемой задаче, чтобы не загружать компьютер СПС излишними расчетами, рационально получать эти массивы данных только один раз в момент возникновения непосредственной опасности столкновения.
10.2. Основная форма отображения информации для выбора срочного действия СО
Для конкретизации условия задачи предполагается, что
-собственное судно имеет главную дизельную энергетическую установку с винтом фиксированного шага;
-«цель» передает данные по линии АИС;
-срочным маневром является: торможение работой машины на ЗПХ или изменение курса с предельной перекладкой руля вправо либо влево;
-комбинированные маневры (курсом и скоростью) не рассматриваются;
-для прогнозирования в реальном времени процессов маневрирования используется адекватная математическая модель.
При указанном перечне возможных действий выбор срочного маневра сводится к определению его вида и параметров, при которых расхождение безопасно с учетом геометрии сближения, размеров судов, навигационной обстановки, вероятного маневра «цели».
Важно, чтобы отображение результатов прогноза маневров на экране СПС обеспечивало быстрое понимание обстановки и возможность оперативного выбора адекватных действий. Ниже характеризуется один из вариантов представления ситуаций чрезмерного сближения включающий две формы: основную и дополнительную.
KØ=00; VØ=17.1 уз; |
|
K1=2570; |
V1=14.0 уз; |
d =0.25 кб; |
t =01m15s ; |
d(P =2.0 кб; tP =02m05s; |
dZ =0.2 кб; tZ =01m23s; |
dS |
=1.3 кб; |
t(S =01m02s; |
θP=80 |
0 |
; |
|
m s |
; |
dP =2.1кб; |
|
t |
m |
s |
; |
|
τP =01 09 |
|
τP |
= 01 16 |
|
θS=680; |
τS |
=01m01s; |
dS =1.3 кб; |
τtS |
=01m03s. |
|
|
|
|
|
|
|
K |
|
|
|
|
|
dZ |
d |
1 |
|
|
|
dS |
K1 |
dS |
KS |
KP |
dP |
|
WP |
|
WS |
dP |
|
|
|
0
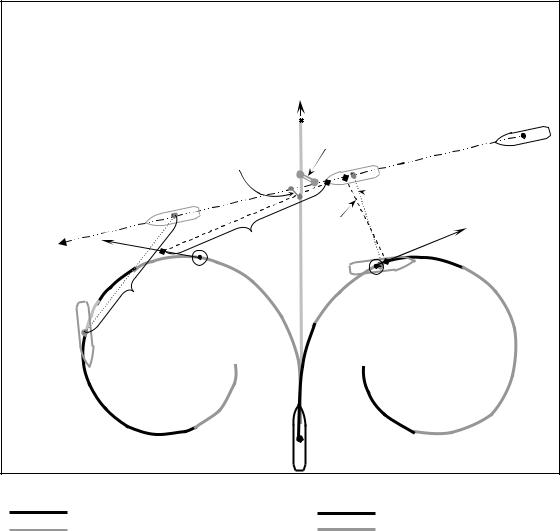
Рис. 10.2. Схема основной формы отображения данных:
D уменьшается с ускорением; |
D растет с ускорением; |
D уменьшается с замедлением; |
D растет с замедлением. |
На основной форме, поясняемой рис. 10.2, рассматривается «цель» с номером 1 и показываются прогнозы траекторий трех названных выше маневров судна оператора. На траекториях отмечаются участки роста и уменьшения дистанции между СО и «целью», а также выделяется ряд
важных элементов. Среди них координаты точек (WP , WS - на циркуляциях, WZ - на пути торможения), в которых впервые при последовательном вычислении по модели точек траекторий значение DCPA становится
максимальным при t ≥ 0.
Графически и в цифровом виде представляются:
KШ, VШ - начальный курс и скорость оперирующего судна; K(1 ,V(1 - курс( и скорость «цели»;
dZ , dP , dS - минимальное расстояние между судном оператора и СЦ при
( (торможении( , циркуляции влево, вправо;
tZ , tP , tS - время от начала маневра до момента минимума расстояния между судами;
θP , θS и τP , τS - углы поворота с окончанием в точке WP , WS и время поворота СО на эти углы;
KP , KS - курсы относительно грунта в точках WP , WS ( KP = KШ+θP ,
t KS = KШ+θS );
dP , dS и τP , τS - расстояния кратчайшего сближения на курсах KP , KS и
время от начала маневра до момента кратчайшего сближения на этих курсах.
Чтобы учесть размеры судов, в точках минимального расстояния между ними показываются их контуры в масштабе отображения обстановки.
Для возможности быстрого понимания ситуации изображение должно быть наглядным. На рис. 10.2 с этой целью данные выделены разным типом линий черного и серого цвета. Из-за перемещения судов с течением времени значения отображаемых параметров непрерывно меняются.
Основная форма отображения служит для быстрого определения первого из действий судна оператора. Она позволяет установить, какой маневр (торможение, уклонение вправо или влево) даст лучший результат.
По данным основной формы оценивается, не проходят ли траектории судна при прогнозируемых мерах по опасным глубинам, и приводит ли маневрирование к расхождению. Так, например, можно установить, что маневр торможения в ситуации на рис. 10.2 не устраняет столкновения. Если навигационных ограничений нет, в качестве первого действия рассматриваются минимальные по времени изменения параметров движения
θP , θS , V , обеспечивающие максимум d при t |
≥ 0. Здесь |
V |
- величина |
изменения скорости при торможении. Предпочтительней |
с |
этой точки |
зрения маневр, в момент окончания которого d |
больше, а относительная |
скорость сближения с СЦ меньше. |
|
|
|


