

8. ПРЕДУПРЕЖДЕНИЕ СТОЛКНОВЕНИЯ ВЫПОЛНЕНИЕМ |
||||||||||
|
ЦИРКУЛЯЦИИ |
|
|
|
|
|
|
|||
|
8.1. Задача определения маневра |
|
|
|
|
|||||
При допустимых углах уклонения вправо или влево длина метки |
||||||||||
ограничения В-маневра главной «целью» может оказаться очень большой. |
||||||||||
Это свидетельствует о том, что, смещаясь в эту сторону, разойтись с ГЦ |
||||||||||
невозможно или нерационально. Когда в другую сторону изменение курса |
||||||||||
опасно, нередко наилучшим действием является циркуляция в безопасную |
||||||||||
сторону [32]. |
|
|
|
|
|
|
|
|
|
|
|
Ситуация 1 |
|
|
|
|
Ситуация 2 |
|
|
||
а) |
|
|
kø |
|
KJ |
J |
d |
kø |
|
г) |
|
|
|
|
|
||||||
KØ |
|
KJ |
d |
|
|
|
|
|
|
|
B |
J |
|
|
|
|
d |
|
|
||
C |
b |
d |
|
KØ |
B |
|
|
|
|
с |
0 |
|
|
b |
|
|
|
||||
|
|
|
C |
|
|
|
||||
в) |
|
|
|
0 |
|
|
|
|
|
|
VJ |
|
с |
|
|
|
|
|
|
||
|
|
е) |
VJ |
|
|
|
|
|
||
VØ |
|
|
|
|
|
|
|
|
||
uø |
|
kø |
|
|
|
|
J |
d |
kø |
|
|
|
d |
VØ |
uø |
KJ |
|
||||
|
KØ |
KJ |
|
|
|
|
|
|
|
|
B |
J |
|
|
|
|
|
|
d |
||
C |
b |
d |
|
|
KØ b |
|
|
|
||
0 |
|
|
B |
|
|
с |
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
C |
|
|
|
|
||
б) |
|
с |
|
|
|
0 |
|
|
д) |
|
|
|
|
|
|
|
|
||||
|
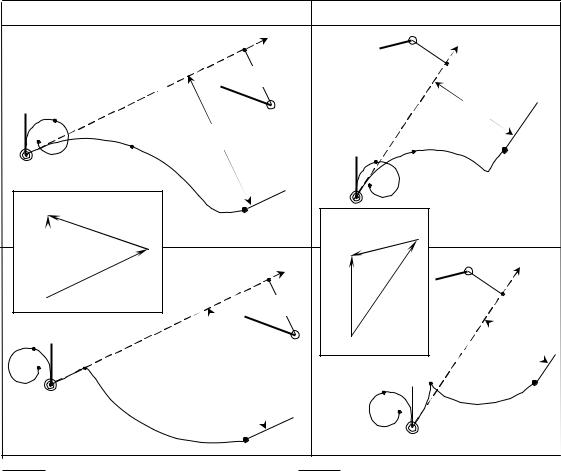
Траектория СО относительно грунта; |
Траектория СО относительно «цели» |
||||||||
Рис. 8.1. Траектории движения СО относительно грунта и «цели» |
||||||||||
При выборе циркуляции следует анализировать траекторию судна оператора как относительно грунта, так и «цели», с которой расходятся. Для двух ситуаций, в которых «цель» сохраняет курс и скорость, такие траектории показаны на рис. 8.1,а,б и 8.1,г.д, где 0 - судно оператора;
J , KJ , VJ - номер «цели», ее курс и скорость;
191
KШ, VШ и kш, uш - курс, скорость СО на момент начала циркуляции по
отношению к грунту и СЦJ;
C и c - точка окончания маневра на истинном и относительном пути СО; B и b - произвольная точка на истинном и относительном пути СО;
d - изменение DCPA в результате маневра.
«Треугольники скоростей», соответствующие движению судов перед циркуляций для рассматриваемых ситуаций представлены на рис 8.1,в и е.
Особенностью циркуляции является независимость d от момента ее
начала. Здесь считается, что маневр начинается до предельной точки, после которой его инициация не обеспечивает безопасного расхождения. Увеличение изменения DCPA достигается уменьшением угла руля, с
которым выполняется циркуляция (увеличением времени маневра τM ).
При планировании циркуляции для устранения угрозы столкновения необходимо определить:
-d по отношению к главной «цели» и достаточность его для расхождения
на дистанции, не меньшей d s ;
-координаты предельной точки начала циркуляции для безопасного расхождения с ГЦ.
-степень риска столкновения с другими «целями» после циркуляции;
-наличие опасности чрезмерного сближения с лимитирующими «целями» в процессе выполнения маневра.
Таблица 8.1. Массив значений параметров движения судна при циркуляции
τ, сек. |
ξ |
ζ |
θ |
V |
S |
0 |
0 |
0 |
θ0 |
V0 |
0 |
1 |
ξ1 |
ζ1 |
θ1 |
V1 |
S1 |
2 |
ξ2 |
ζ2 |
θ2 |
V2 |
S2 |
… |
… |
… |
… |
… |
… |
i |
ξi |
ζi |
θi |
Vi |
Si |
… |
… |
… |
… |
… |
… |
τМ |
ξM |
ζM |
θM |
VM |
SM |
При решении этих задач используется полученный по математической модели массив значений параметров движения судна (табл. 8.1), характеризующий их изменение в процессе циркуляции. Значения этого массива при нормальной погоде зависят от загрузки судна, его скорости,
выбранного угла руля β (по умолчанию β =150 ). Чтобы не загружать
компьютер СПС излишними расчетами, рационально получать массив данных циркуляции эпизодически - только при изменении режима хода или при назначении другого значения β.
192
8.2. Изменение DCPA при циркуляции
Задача рассматривается при условии, что маневр инициируется до предельной точки его начала. Для получения решения выполняются следующие операции.
1) По математической модели судна (с учетом его скорости VШ перед циркуляцией и выбранного угла перекладки руля β) рассчитываются точки Pi циркуляционной траектории с регистрацией времени τi прибытия в них, начиная от момента перекладки руля (точка A) до точки C поворота на 3600, которой соответствует время τM выполнения циркуляции в целом.
|
|
|
КØ КЕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SЕ |
|
|
|
|
|
SE≈0; |
VE≈0; |
|
|
С |
|
|
ue≈VJ; ke≈KJ+1800; |
|
|||
А |
|
|
а) |
|
|
se≈ ue ·τM; |
|
|
|
|
|
|
|
δ=ke-kø; |
|
||
|
|
|
|
|
|
d= se ·sin δ. |
|
|
|
К |
|
Ø |
|
|
КJ |
kø |
|
VJ |
|
|
|
J ds |
||||
|
|
|
||||||
|
|
|
|
|
|
|
||
V |
|
|
0 |
|
б) |
VJ |
||
|
|
|
||||||
uø |
|
|
δ |
|
|
|
|
|
|
|
d |
|
|
|
|||
|
|
|
se |
|
|
|
V |
|
|
|
|
с |
ke |
|
|||
|
|
|
|
|
|
|||
kø
ds J
КJ
d
ke
с
КØ
se
0
в)
uø
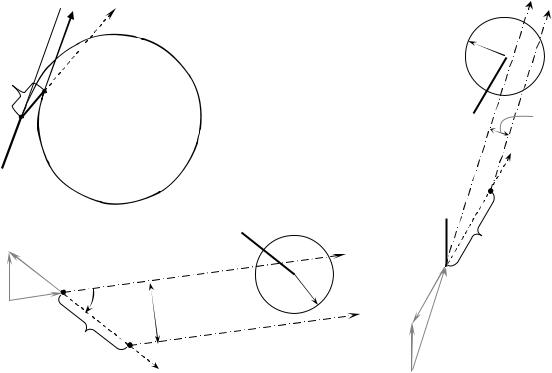
Рис. 8.2. К определению изменения DCPA
2) Траектория циркуляции заменяется эквивалентным по времени прямым отрезком AC (рис. 8.2,а). Длина SE этого отрезка и направление
KE перемещения по нему рассчитываются по координатам точек |
A, C . |
Скорость хода по этому отрезку принимается равной |
|
VE = SE / τM . |
(8.1) |
3) Вычисляются элементы kш, uш и ke , ue движения СО относительно «цели» по ее курсу, скорости и кинематическим параметрам судна оператора
( KШ, VШ и KE , VE ).
193
4) По значениям ue и τM определяется пройденное в относительном движении по курсу ke расстояние (см. рис. 8.2,б)
se = ue τM . |
(8.2) |
|
5) Рассчитывается изменение |
d (см. рис. 8.2,б) дистанции кратчайшего |
|
сближения за время циркуляции |
|
|
d |
= se sinδ, |
(8.3) |
где δ = ke −kш.
6) Находится значение DCPA ( dμ ), которое будет после маневра
dμ = ABS( d ± d ) , |
(8.4) |
где d - дистанция кратчайшего сближения до циркуляции.
Знак «плюс»/«минус» в формуле соответствует ситуации, когда при условии сохранения курса и скорости судно оператора пересечет курс СЦ «по корме»/«по носу».
Если dμ ≥ d s , то маневром достигается цель расхождения.
Ввиду малости значения SE (см. рис. 8.2,а) обычно оно принимается
равным нулю. При таком допущении получается упрощенное решение, которое приведено в рамке на рис. 8.2.
ПРИМЕЧАНИЕ. Циркуляция не является эффективным действием для расхождения, когда приближающаяся к судну оператора опасная «цель» находится у него на малом курсовом угле ( q ≈ K −kш). В этой ситуации
изменение DCPA при циркуляции мало (см. рис. 8.2,в). Такое сближение наблюдается, когда курс СО близок к контркурсу «цели» либо скорость «цели» значительно меньше скорости СО. В этом случае время до опасного сближения при выполнении маневра увеличивается.
8.3. Приближенное определение предельной точки начала циркуляции
Задач состоит в нахождении предельной точки, начало маневра в которой еще приводит к безопасному расхождению с «целью» на дистанции d ≥ d s .
Алгоритм приближенного расчета. При поиске предельного начала A
циркуляции (рис. 8.3) для расхождения с опасной «целью» обычно считают,
194
что траектория СО не должна попадать в полосу движения «цели» с границами, отстоящими от ее линии пути на расстоянии d s [23].
|
θB |
КØ |
|
КØ |
θB |
|
|
|
|
||||
|
|
b" S2 |
|
|
ds |
|
|
|
|
КJ |
b" |
||
КJ |
ds |
|
|
ξB |
||
S1 SA |
S2 |
B |
||||
B |
|
SA |
S1 |
|||
|
|
ζB |
b´ |
С |
||
b´ |
ξB |
ζB |
||||
|
|
|
||||
|
С |
|
A |
|
||
|
A |
|
|
|||
|
|
|
|
|
||
|
0 |
а) |
б) |
|
0 |
|
|
|
|
|
|||
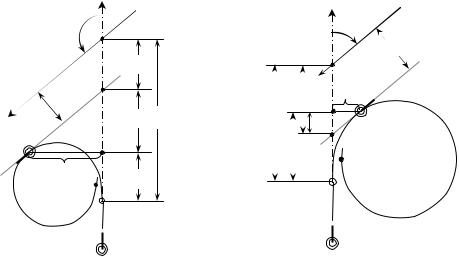
Рис. 8.3. К расчету предельной точки начала циркуляции
С учетом этого обстоятельства точка A определяется расстоянием SA
до точки пересечения линий курсов СО и СЦ. Оно (см. рис. 8.3) состоит из трех отрезков:
|
|
SA = ζB − S1 + S2 . |
|
|
|
|
(8.5) |
||||||
В этом выражении |
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
2 |
= d s / sinθ |
B |
, |
S |
= |
|
ξ |
B |
|
ctgθ |
B |
, |
|
|
||||||||||||
|
|
|
1 |
|
|
|
|
|
|
||||
где θB - угол поворота на курс, параллельный курсу «цели».
Значения ξB , ζB , τB в массиве данных циркуляции (табл. 8.1),
являются координатами точки B , в которой значение курса относительно грунта наиболее близко к контркурсу «цели» (если циркуляция планируется в ее сторону, см. рис. 8.3,б), или к курсу «цели» (если СО намерено совершать маневр в противоположную сторону, рис. 8.3,а).
Погрешность расчета. Приведенный приближенный метод основан на предположении, что циркуляция, инициированная в предельной точке, касается отрезка b′b′′ (см. рис. 8.3), параллельного линии курса «цели» и
отстоящего от нее на расстоянии d s . Нетрудно установить, что такое предположение не является условием, при котором обеспечивается расхождение с «целью» точно на заданной дистанции.
195

Суда |
разойдутся |
на |
d = d s , |
когда |
траектория |
движения |
СО |
||||
относительно «цели» будет касаться окружности радиусом d s |
с центром в |
||||||||||
месте «цели». |
|
|
|
|
|
|
|
|
|
|
|
|
|
KØ |
KJ ZJ |
BJ |
|
|
|
|
|
|
|
|
b´ |
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
|
|
J |
|
|
|
|
|
A |
|
B |
|
|
|
|
|
|
|
|
|
à |
|
|
|
|
|
|
|
|
|
|
|
SA |
SÃ |
|
|
b" |
|
а) |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VØ |
|
VJ |
|
|
|
|
|
kø |
|
|
|
|
uø |
в) |
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
b´ |
|
|
J |
|
d |
|
||
|
|
|
|
|
|
|
ds |
|
|
||
|
|
|
|
ã a |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
KØ |
s̃a |
b |
|
z |
ds |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
sa |
|
б) |
|
|
c |
|
b" |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
c̃ |
|
|
|
|
Рис. 8.4. К оценке погрешности приближенного расчета |
|
|||||||||
Отличие результатов приближенного и точного методов характеризуется на рис. 8.4. На нем для одной из ситуаций сближения судов, в которой СО намечает циркуляцию в предположении, что «цель» будет сохранять курс и скорость, представлено движение судов относительно грунта (рис. 8.4,а) и перемещение СО относительно «цели» (рис. 8.4,б).
~
На рис. 8.4,а циркуляция с предельным началом A , найденным приближенно, отображена сплошной линией. Символом B обозначена точка касания циркуляции и отрезка b′b′′, параллельного линии курса «цели» и
отстоящего от нее на расстоянии d s . В момент прихода СО в точку B «цель» окажется в позиции BJ .
Точная граница начала безопасных циркуляций на рис. 8.4,а обозначена A . Отвечающая этому началу циркуляция, приводящая к расхождению с
«целью» на дистанции d s , показана на рис. 8.4,а точечной линией. В позициях Z и ZJ СО и «цель» будут в момент кратчайшего сближения.
196