

M |
KØ |
|
KØ |
|
|
|
|
KØ |
|
|
|
Q |
а) |
|
M |
б) |
|
в) |
|||||
А |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z КS |
|
|
|
Z |
M |
|
|
КS |
|
|
|
|
G |
КS |
|
G |
|||||
|
|
G |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Z |
|
|
0 |
|
|
0 |
|
|
|
0 |
|
|
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
tA1>0; |
tA2>0; |
|
tA1>0; |
tA2>0; |
|
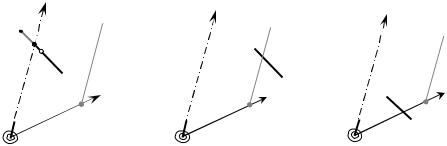
tA1<0; |
tA2>0; |
||||
tB1<0; tBG >tB2>0. |
|
tBG>tB1>0; |
tB2>tBG. |
|
tB1>0; tBG >tB2>0. |
||||||
Рис. 7.4. Условия расположения МОМ
Взаключение можно отметить:
-«Цель», МОМ которой попадает на линию курса судна оператора, является опасной по d–критерию.
-Не представляющая угрозы «цель», метка или часть метки которой попадает в ОДМ, является лимитирующей В-маневр.
-Если линия пути СО проходит через метку ограничения в точке A (как на рис. 7.4,а), то расстояние кратчайшего сближения с «целью» равно
t |
|
s |
|
AQ |
|
d |
= 2 d |
|
|
MZ . |
(7.10) |
7.3. Погрешность в дистанции расхождения из-за пренебрежения инерционностью СО при В-маневре
Намечаемая траектория В-маневра рассматривается как маршрут судна для расхождения с «целью». При следовании по заданному маршруту для учета инерционности судна поворот начинается с упреждением, необходимым для точного выхода на новый отрезок пути. Выше при построении МОМ (см. параграфы 7.1, 7.2) повороты судна оператора считались мгновенными. Такое предположение приводит к погрешности прогноза положения «целей» на конец В-маневра. В результате при расхождении возникает несоответствие DCPA с дистанцией, намеченной по концам метки.
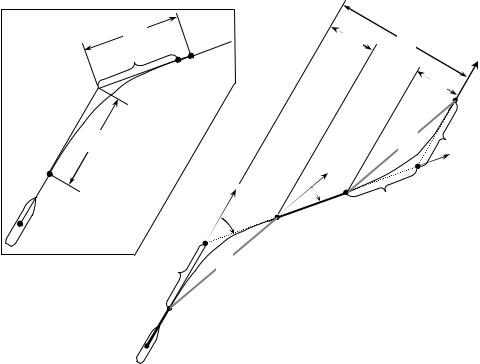
Траектория центра массы судна при изменении KШ на угол и показана на рис. 7.5,а, где
Sθ - расстояние до путевой точки CH , на котором надо начать поворот, чтобы точно выйти на линию нового курса;
Sθ2 - дистанция от CH до точки Cθ , в которой судно выходит на новый курс.
При автоматическом выполнении поворота Sθ2 обычно меньше, чем Sθ. Аналогичная картина наблюдается и при изменениях курса опытными рулевыми.
177
Sθ
Sθ2
CН
ξθ |
ξ |
KØ |
Cθ C2 |
|
|
|
ξθ |
|
|
|
C4 |
|
Sθ |
|
|
|
SЕ |
Sθ |
C1 |
|
|
|
KE |
F |
KS |
|
|
K |
|
θ/2 |
|
|
|
|
|
Sθ |
|
||
0 |
а) |
C2 |
C3 |
|
||
θ |
|
|
|
|||
|
|
CН |
|
б) |
|
|
|
Sθ |
SЕ |
|
|
|
|
|
|
|
|
|
||
|
C1 |
|
|
|
|
|
|
0 |
Рис. 7.5. Характеристика |
|
|||
|
|
|
|
В-маневра |
|
|
При планировании В-маневров с учетом динамики судна для удобства
концом поворота считается точка C2 . Она отстоит от CH на таком же расстоянии Sθ, как и точка C1 (см. рис. 7.5,а). Время tθ поворота и траекторию судна между точками C1 и C2 целесообразно находить моделированием движения. Дистанция C1C2 , проходимая судном при изменении курса, короче расстояния по ломаной линии C1CH C2 . Из-за этого продолжительность В-маневра будет меньше его времени, получаемого без
учета инерционности судна. |
Разность θt между временем движения |
по |
|
прямым отрезкам пути C1CH C2 ( 2 Sθ) и временем tθ |
поворота судна на |
||
угол θ находится по формуле |
|
|
|
θt |
= 2 Sθ / V −tθ. |
(7.11) |
|
В табл. 7.1 для двух судов приведены параметры изменения курса с углом руля β =150 . По этим данным можно установить, что величина θt
может быть значительной.
Если по МОМ, полученной без учета инерционности СО, выбрать В-
маневр для расхождения на дистанции d s , то при пересечении курса «цели» по носу из-за меньшего времени поворота DCPA будет больше, а при
пересечении по корме – меньше, чем d s . Величина несоответствия зависит
178
от угла θ, соотношения скоростей и геометрии сближения судов. При больших углах θ она может достигать 5 кб.
Таблица 7.1.- Параметры, характеризующие В-маневр
|
Контейнеровоз, 25 тыс.т., |
Танкер, 130 |
тыс.т. , |
||||||
θ0 |
|
V= 17,1 уз. |
|
|
V= 13,6 |
уз. |
|
||
30 |
60 |
90 |
120 |
30 |
60 |
90 |
120 |
||
Sθ, кб |
1,4 |
2,1 |
3,1 |
4,8 |
2,4 |
3,6 |
5,1 |
7,7 |
|
θt, с |
1 |
4 |
20 |
65 |
9 |
16 |
45 |
131 |
|
2 θt, с |
2 |
8 |
40 |
130 |
18 |
32 |
90 |
262 |
|
ξθ, кб |
0,7 |
1.8 |
3,1 |
4,2 |
1,2 |
3,1 |
5,1 |
6,7 |
|
ξ, кб |
1,4 |
3,6 |
6,2 |
8,4 |
2,4 |
6,2 |
10,2 |
13,4 |
|
Увеличение DCPA при пересечении курса «цели» по носу не оказывает отрицательного влияния на безопасность маневра в отличие от уменьшения DCPA при расхождении по корме. Для устранения несоответствия между планируемой и действительной DCPA, метка должна рассчитываться с учетом динамики СО.
Инерционность судна оператора ограничивает нижнюю границу ξ
полосы допустимых смещений. Чтобы при В-маневре нормально отработать два поворота в разные стороны на угол θ (см. рис. 7(.5,б), задаваемое
смещение ξ от линии пути должно быть больше величины ξ = 2 ξθ .
7.4. Определение меток ограничения В-маневра с учетом инерционности судна
При рассмотрении алгоритма используются схемы, характеризующие истинное (рис. 7.6) и относительное (рис. 7.7) движение судна оператора при В-маневрах. На этих схемах криволинейные участки поворотов СО заменены
(см. рис. 7.5,б) эквивалентными по времени прямыми отрезками ( SE - на схеме истинного и se - на схеме относительного движения).
Алгоритм расчета с учетом инерционности СО положения МОМ включает следующие операции.
1)Моделированием поворота на угол θ находится траектория C1 C2 судна и параметры Sθ и tθ (см. рис. 7.5,а).
2)Криволинейные участки C1 C2 , C3 C4 (см. рис. 7.5,б) заменяется эквивалентными по времени прямыми отрезками длиной SE
SE |
= 2 Sθ cos |
θ. |
(7.12) |
|
|
2 |
|
179
Y KØ
YM 
 M
M
A2
YZ |
A0 |
|
|
Z |
|
|
|
|
|
||
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
SE |
SE |
|
KS |
|
SE |
|
||||
|
G |
||||
B2 |
|
||||
ОА |
B1 |
|
|
||
ОВ |
B0 |
|
|
||
0 |
|
|
|
|
KJ |
|
|
XM |
XZ |
J X |
|
Рис. 7.6. Характеристика истинного движения СО при В-маневре
|
|
uø |
|
ue |
us |
|
|
VJ |
V б) |
VJ |
VJ |
|
|
Y |
VE |
VS |
|
|||
0 оа |
|
a1 |
a0 |
a2 |
kø |
|
se оb |
|
se |
|
|||
b1 |
|
KJ |
m |
|
||
|
|
se b3 |
|
|||
|
a) |
b0 |
|
J |
ks |
|
|
|
se b4 |
||||
|
|
|
ds |
|
||
|
|
|
|
b2 |
z p |
X |
|
|
|
|
ks |
Рис. 7.7. Перемещения СО относительно «цели» при В-маневре
3) Рассчитывается курс и скорость судна на этих отрезках |
|
KE = 0,5 (KШ+ KS ) , |
(7.13) |
VE = SE / tθ. |
(7.14) |
4) Решением «треугольников скоростей» (рис. 7.7,б) по формулам (7.2), (7.3) определяется относительный курс и скорость судна оператора:
kш uш - для движения СО курсом KШ и скоростью V ;
180
ks , us - для движения СО курсом KS и скоростью V ; ke , ue - для движения СО курсом KE и скоростью VE .
5) По ue и tθ вычисляется эквивалентное расстояние se , которое за
время поворота проходит СО в относительном движении |
|
||||||||||||
|
|
|
|
se = ue tθ. |
|
|
|
(7.15) |
|||||
6) Находятся интервалы времени tA0 , tB0 следования судна оператора |
|||||||||||||
между точками OA и A0 , OB и B0 (рис. 7.6) |
из системы |
линейных |
|||||||||||
уравнений |
|
|
|
|
|
|
|
|
|
|
|
|
|
usxtB0 +uxtA0 = X J − X 0 −2 sex |
|
||||||||||||
u |
sy |
t |
B0 |
+u |
y |
t |
A0 |
=Y |
−Y |
−2 s |
ey |
. |
(7.16) |
|
|
|
|
J |
0 |
|
|
|
|||||
Эти соотношения отражают относительное перемещение СО по пути 0,ob ,b0 ,b3 ,J для сближения с «целью» вплотную (см. рис. 7.7,а).
7) Находится время tB2 следования СО от точки 0B до точки B2 и время τA движения от B2 до СРА из системы уравнений
usxtB2 +uшxτA = X J
usytB2 +uшyτA =YJ
− X0 |
+ d |
s |
|
|
|
|
|
|
|
coskш− 2 sex |
(7.17) |
||||||
−Y |
− d s sink |
|
− 2 |
s |
, |
|||
ш |
|
|
||||||
0 |
|
|
|
|
|
ey |
|
|
Она составляется при рассмотрении относительного перемещения СО по
пути 0,o |
,b |
,b , p для расхождения с «целью» на расстоянии |
d s , где p |
|||
b |
2 |
4 |
|
|
|
|
(СРА) - точка касания линии курса kш и окружности радиуса d s |
с центром в |
|||||
месте «цели». |
|
|
|
|
|
|
8) Рассчитываются интервалы времени tA1 , tA2 |
и tB1 следования судна |
|||||
оператора от места OA соответственно до точек A1, |
A2 курсом KШ и от OB |
|||||
до точки B1 курсом KS (см. рис. 7.6) |
|
|
|
|||
|
|
tb |
= tB2-tB0 |
|
|
(7.18) |
|
|
ta = |
|
, |
|
|
|
|
tb us / uш |
|
|
||
181