

3.1. Деформации, перемещения
Деформацией тела называется изменение его формы или размеров, или того и другого одновременно, без изменения массы тела.
Деформация тела обычно связана с изменением взаимного положения отдельных его точек (рис. 3.1). При этом линия, соединяющая две точки тела, называется линейным элементом данного направления (ab- в направлении осиоxиac- в направлении осиоy, рис. 3.1).
Изменение длины линейного элемента называется абсолютной линейной деформацией или абсолютным удлинением по данному направлению.
Отношение изменения длины бесконечно
малого линейного элемента
 к первоначальной его длине
к первоначальной его длине называется относительной линейной
деформацией в точке по данному
направлению.
называется относительной линейной
деформацией в точке по данному
направлению.
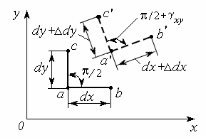
Рис. 3.1
Изменение прямого угла между двумя бесконечно малыми линейными элементами, выходящими из одной точки, называется углом сдвига в этой точке в плоскости линейных элементов.
Линейные и угловые деформации - величины безразмерные.
Изменение положения точки тела (изменение ее координат) в результате действия внешних сил называется линейным перемещением.
Вектор, проведенный из начального положения точки до деформации тела в конечное ее положение после деформации, называется полным линейным перемещением этой точки. Проекция полного линейного перемещения точки на какое-либо направление называется линейным перемещением точки по данному направлению.
Угол, составленный направлением линейного элемента тела после деформации с его первоначальным направлением, называется угловым перемещением.
Приняты следующие обозначения для линейных и угловых деформаций:
- относительные линейные деформации по
оси x- ,
по осиy -
,
по осиy -
 ,
по осиz-
,
по осиz- ;
;
- угловые деформации (сдвиги) в плоскости
xoy- ,
в плоскостиyoz-
,
в плоскостиyoz- ,
в плоскостиzox-
,
в плоскостиzox- .
.
Совокупность линейных деформаций
 по различным направлениям и
угловых деформаций
по различным направлениям и
угловых деформаций по различным плоскостям, проходящим
через рассматриваемую точку,
представляет собой деформированное
состояние в точке.
по различным плоскостям, проходящим
через рассматриваемую точку,
представляет собой деформированное
состояние в точке.
Компоненты перемещений некоторой точки а, имеющей до деформации координатыx,y,z, обозначим черезu - по осиx, v - по осиy, w - по осиz. Эти компоненты линейного перемещения точки являются функциями координат точкиа.
Перемещение соседней точки b, координаты которой отличаются от координат точкиaприращениямиdx,dy,dz, получим, разложив перемещения в ряд Тейлора и ограничившись бесконечно малыми первого порядка:
 ,
,
 ,
,
 .
.
3.2. Зависимости между деформациями и перемещениями. Формулы Коши
Бесконечно малый параллелепипед dxdydz, вырезанный из упругого тела около произвольной точки а, вследствие различия перемещений его точек деформируется, т. е. изменяется длина его ребер и искажаются первоначально прямые углы между гранями (рис. 3.2).
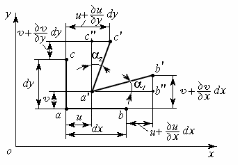
Рис. 3.2
Длина ребра abравнаdx, ребраac
- dy. После деформирования
точкиa, bиc займут новые
положения - и
и .
При этом точкааполучит
перемещение, составляющие которого
в плоскости чертежаuиv.
Точкаb, отстоящая от точкиана
бесконечно малом расстоянииdx,
получит перемещение,
составляющие которого будут отличаться
от составляющих перемещения
точкиaна бесконечно малую
величину за счет изменения координатыx:
.
При этом точкааполучит
перемещение, составляющие которого
в плоскости чертежаuиv.
Точкаb, отстоящая от точкиана
бесконечно малом расстоянииdx,
получит перемещение,
составляющие которого будут отличаться
от составляющих перемещения
точкиaна бесконечно малую
величину за счет изменения координатыx:
 .
.
Составляющие перемещения точки с будут отличаться от составляющих перемещения точки a на бесконечно малую величину за счет изменения координатыy:
 .
.
Проекция абсолютного удлинения ребра abна осьxпосле деформации равна:
 .
.
Относительное удлинение вдоль оси x, или, по другому, линейную деформацию по направлению осиxзапишем как
 .
.
Аналогично получим линейные деформации по направлениям координатных осей yиz:
 ,
, .
.
Итак, линейная деформация по любому направлению равна частной производной составляющей перемещения в этом направлении по переменной в том же направлении.
Рассмотрим теперь изменения углов между ребрами параллелепипеда:
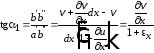 .
.
Пренебрегая линейной деформацией
 по сравнению с единицей, получим
по сравнению с единицей, получим и, по аналогии,
и, по аналогии, .
.
Ограничиваясь рассмотрением только
малых деформаций, можно полагать
 ,
тогда
,
тогда ,
, .
.
Угол сдвига в плоскости xoy, т. е. искажение прямого углаbac, называется угловой деформацией и определяется как сумма углов поворота ре-
бер abиac: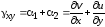 .
.
Аналогично найдем угловые деформации в двух других координатных плоскостях:
 ,
, .
.
Итак, угловая деформация в любой плоскости равна сумме частных производных составляющих перемещения в этой плоскости по переменным в перпендикулярных направлениях.
Суммируя все вышеизложенное, можно записать шесть основных зависимостей составляющих линейных и угловых деформаций от составляющих перемещения:
 ,
,
(3.1) ,
,
 .
.
Эти уравнения были получены О. Коши (1823 г.) и носят его имя.
В пределе, когда длина ребер параллелепипеда стремится к нулю, формулы (3.1) определяют линейные и угловые деформации в точке a.
Правило знаков для составляющих деформации:
1. Положительным линейным деформациям отвечают удлинения по соответствующим направлениям, а отрицательным - укорочения.
2. Положительным угловым деформациям соответствует уменьшение углов между положительными направлениями координатных осей, а отрицательным - увеличение тех же углов.