

ovta-zbirnyk-zadach
.pdf7.2. а) (a,b,c) +(a,b,c) +(a,b,c) ; б) a ×(b ×c) +a ×(b ×c) +a ×(b ×c).
7.6.Указівка: для доведення другого твердження скористатися результатом задачі 7.4.
7.7.Указівка: вектор прискорення r є паралельним до вектора r ,
тобто r × r = 0, якщо |
d |
(r ×r ) = 0, тоді r ×r = const, |
і траєкто- |
|
dt |
||||
|
|
|
||
рією руху є плоска крива; розв'язати рівняння r = β2 r |
у площи- |
|||
ні z=0 та отримати знаконевизначену квадратичну форму, яка задає рівняння гіперболи.
7.8. ϕ(t) =1/(at +b) , a,b = const. Указівка: для прямої [r × r ]z = 0.
7.9. Якщо напрям r є незмінним. Контрприклад: r |
= (cost,sin t) , |
||||||||||
|
r |
|
= 1, |
d |
|
|
r |
|
= 0. |
|
|
|
|
|
|
|
|
|
|||||
|
|
dt |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
7.10. Траєкторіями є кола, утворені перетином сфер |
r 2 = C12 із |
||||||||||
площинами |
(r a) = C2 . Задача відповідає руху |
в |
просторі |
||||||||
швидкостей зарядженої частинки в однорідному постійному магнітному полі. Інтегралами руху є кінетична енергія та проекція імпульсу на напрямок магнітного поля.
7.11. У декартовій системі координат, де Oz n :
y(t) = C2 et , z(t) = C3 , де Ci = const . Траєкторіями є прямі, що перетинають вісь Oz під прямим кутом.
подати вектор швидкості у вигляді r = vn, де n –
одиничний вектор, та отримати із рівняння Ньютона, що n = 0. рівняння Ньютона  помножити вектор-
помножити вектор-
но на r і на L = mr × r , скористатись результатом задачі 7.1 ж), та отримати векторні інтеграли руху L та A = α(r r )+ r × L.
Траєкторіями є гіперболи, еліпси або параболи, що лежать у площині r L = 0, напрям на перигелій указує вектор A. Рівняння траєкторії у циліндричній системі координат, пов'язаній із L
та A: ρ = |
L2 / m |
. |
|
Acos ϕ − α |
|||
|
|
111

Диференціальні операції над скалярними та векторними функціями
8.3. div(ϕA) = (ϕA) = (ϕA + ϕA) =
=ϕ A + ϕ( A) = A ϕ + ϕdiv A
8.7.( A B) = ( A B) = ( A B) + ( A B) . Для зміни порядку множників у кожному із доданків скористаємося формулою для подвійного векторного добутку у вигляді b(a c) = a ×(b ×c) +(a b)c .
Тоді ( A B) = (B A) = B ×( × A) +(B ) A = B ×rot A +(B ) A,( A B) = A × ( × B) + ( A )B = A × rot B + ( A )B .
Додаючи отримані рівності, знайдемо
( A B) = A rot B + B rot A + ( A ) B + ( B ) A .
8.17.div A .
8.21. а) r 2 = ( x2 + y2 + z2 ) = 2( xex + yey + zez ) ≡ 2r . З іншого
боку, r 2 = 2r r, |
звідки r = r/r. |
Другий спосіб |
|
|
|||||||||||||||||||||||||
|
r = |
x |
2 |
+ y |
2 |
+ z |
2 |
= |
|
|
xex + yey + zez |
≡ |
r |
; |
|||||||||||||||
|
|
|
|
|
|
|
|
x2 + y2 + z2 |
r |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
∂ |
|
|
|
|
∂ |
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
||||||
б) (a r ) = ex |
|
|
|
+ ey |
|
|
|
|
+ ez |
|
|
|
|
|
( xax + yay + zaz ) = |
|
|||||||||||||
∂x |
∂y |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
||||||||||||
|
= ax ex + a y ey + az ez ≡ a; |
|
|
|
|
|
|
|
|
||||||||||||||||||||
в) nrn−2r ; г) |
(a r )r |
+ ra; д) − |
αr |
; є) |
r |
; |
|
|
|
||||||||||||||||||||
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r3 |
|
r 2 |
|
|
|
|||||
|
|
|
|
∂ |
|
|
|
|
|
∂ |
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
||||||
ж) |
(a )r = ax |
|
|
|
+ a y |
|
|
|
|
+ az |
|
|
|
|
|
|
( xex + yey + zez ) = |
|
|||||||||||
|
∂x |
|
∂y |
|
|
∂z |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
= ax ex + a y ey + az ez ≡ a .
Зауважимо, що у цьому випадку вектор a може бути змінним.
з) a(r b ) + b(r a) ; і) f (r)a + |
(a r )r |
f ′(r) ; |
|
r |
|||
|
|
к) 2a2r − 2a(a r ) ; л) 2a(a r ) ; м) r 2 a − 3(a r )r . r5
112
8.22. а) 3, 0; |
б) 5r2, 0; в) (n + 3)rn, 0; г) 2/r, 0; д) 0, 0; є) |
(3 − n)r −n , |
||||||||||||||||||||||||||||||||||
0; ж) 0, |
2a ; з) |
div(r(a r)) = (a r)divr + r (a r) = 3(a r) + r a = 4(a r) , |
||||||||||||||||||||||||||||||||||
де використано "елементарні" |
похідні |
div r = 3, |
(a r ) = a ; |
|||||||||||||||||||||||||||||||||
rot(r (a r )) = a r ; |
|
і) |
|
(a b ) , −a ×b ; |
|
|
|
к) |
nrn−2(a r) , |
nr n−2 (r × a); |
||||||||||||||||||||||||||
л) 2(a b) , −a b ; м) −2(a r ), 3r ×a ; н) 0 , (−r 2 a + 3(a r )r )/r5 ; |
|
|||||||||||||||||||||||||||||||||||
о) a r |
r2 |
, r ×a |
|
п) 0, 3ra − |
(a r )r |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
8.23. |
|
|
|
|
r2 |
|
|
|
|
≡ r |
|
|
|
r |
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
|
|
||||||
а) |
|
ϕ |
|
ϕ′ |
|
|
|
|
|
ϕ′ |
|
; |
|
|
|
|
′ |
|
в |
) |
|
|
|
′ |
|
|
||||||||||
|
|
|
(r) = |
(r) r |
|
|
|
r |
|
(r) |
|
б) |
|
r |
|
|
|
r |
× A (r) . |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A(r) ; |
|
|
|
|
|
|
|
||||||||
8.24. |
а) ϕ(r)a + r r ϕ′(r)(a r ) ; |
|
|
б) |
a A(r) + (a r )(r r A′(r)); |
|||||||||||||||||||||||||||||||
в) |
|
|
|
|
|
|
|
r |
|
|
′ |
|
|
|
|
|
|
|
|
г) |
A(r) × a + ( A′(r), a, r ) |
r |
|
; |
||||||||||||
a ×A(r) +(a r )( r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|||||||||||||||||||||
|
× A (r)) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
д) 2(a A(r)) + (ra − (a r ) r r ) A′(r) ; є) a ×(A(r) +(r A′(r)) r r ). |
|
|
||||||||||||||||||||||||||||||||||
8.25. а) |
ϕ′′(r) + |
2 |
|
ϕ′(r) ; б) |
ϕ′′(r) |
; в) A′′(r) + |
2 |
|
A′(r) ; г) n(n −3)(a r)r−n−2 . |
|||||||||||||||||||||||||||
r |
|
|
r |
|
|
r |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ikr |
|
|
|
|
|
|
|
|
|
|
|
|
г) (a |
+ik(r a))eik r ; |
|
|||||||||||||
8.26. а) |
ik eik r ; |
|
б) |
|
|
eikr; |
|
|
|
в) |
(ikr −1)r |
eikr ; |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
r3 |
|
|
|
|
||||||||||||||||||||||||
|
|
r |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
д) |
|
ik r |
; |
|
|
|
|
|
|
|
|
|
|
ik r |
; |
|
|
ж) |
e |
ik r r |
r |
A′(r) |
+ ik |
|
|
|
; |
|
||||||||
|
i(k a)e |
|
|
|
|
є) |
i(k ×a)e |
|
|
|
|
|
|
|
|
A(r) |
|
|||||||||||||||||||
з) ikr −1(a r)eikr ; r3
л)
− 2i(k r ) + k2r2 eik r ; r3
і) |
ikr −1 |
( |
r ×a |
) |
eikr |
; |
к) − |
k |
2 |
e |
ik r |
; |
||||
r3 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
2ik |
|
|
2 |
|
|
ikr |
|
|
|
|
|
|
|
||
м) |
|
|
− k |
|
e |
|
|
. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||||
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
8.27. с/r3, де c = const. |
r ×(a × r ) |
8.28. с/r, де c = const. |
|
|||||||||||
|
|
|
|
|
|
|
e |
|
|
|
e |
|
||
8.29. 0; |
2ϕ(r) a + ϕ′(r) |
|
. 8.30. |
|
B |
× |
p − |
|
A . |
|||||
8.31. a) (a ) ϕ, |
|
|
r |
|
2mc |
|
|
c |
|
|||||
б) ϕgrad(div A) + grad ϕdiv A + |
|
|
|
|
||||||||||
|
|
|
|
|
+(grad ϕ ) A + ( A ) grad ϕ + grad ϕ× rot A. |
|||||||||
8.32. a) |
|
|
|
′ |
б) 0; |
|
|
|
′ |
|
|
|
||
3ϕ(r) + rϕ |
(r) ; |
в) ϕ(r)a + ϕ |
(r)(a r )(r / r). |
|||||||||||
8.33. 1 |
|
|
|
− |
ϕ′(r) |
|
ϕ′(r) |
. |
|
|
|
|
||
r |
2 |
ϕ′′(r) |
r |
r × (r × a ) − 2a |
r |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
113 |
|
|
|
|
|
|
|
|

|
|
|
′ |
r); |
|
′ |
|
|
|
|
|
′ |
|
|||
8.34. a) A(r) + (r A (r))(r |
б) ( A |
(r) B(r) + A(r) B |
(r))(r r); |
|||||||||||||
в) |
(ϕ(r)(r |
|
′ |
|
|
г) |
ϕ(r) |
r |
r |
′ |
|
′ |
(r) |
r |
r |
× A(r); |
|
A'(r)) +ϕ (r)(r A))/r; |
|
|
× A |
(r) + ϕ |
|
||||||||||
д) a r r ϕ′(r); є) a r r (ϕ′(r) A(r) + ϕ(r) A′(r)); |
ж) 0; |
|
|
|
||||||||||||
з) ϕ′(r) + 2 |
r |
ϕ(r); і) r × a |
r |
3 ; к) (A′(r) ×(r ×a)) |
r . |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
8.35.a) 2a2 ; б) 4a2 ; в) −2a .
8.36.a) ddfϕ f ; б) dAdf f ; в) f × dAdf .
8.37. a) u u + (grad u)2 , б) u v + grad u grad v. |
|||
8.38. div v = 0, rot v = 2ω; div a = −2ω2 , |
rot a = 2ε. |
||
8.39. −∫ rϕ(r) dr + c, де c = const . |
|
||
8.40. F = − Φ(r) = − |
d Φ(r) |
er = F (r )er , |
Φ(r) = −∫ F(r)dr. |
|
|||
|
dr |
|
|
8.41. F = ϕ(ρ)ρ/ρ = − Φ; |
Φ = −∫ ϕ(ρ) d ρ , де ρ = xi + yj. |
|||||
|
n |
|
γmi |
|||
8.42. ϕ(r ) = −γm r . |
8.43. ϕ(r ) = −∑ |
|
|
|
|
. |
|
r − r |
|
|
|||
|
|
|||||
|
i=1 |
|
i |
|
|
|
|
|
|
||||
8.44. Указівка: обчислити div A . 8.45. ϕ(r) = c/r3, де c = const, r ≠ 0.
8.46.Указівка: обчислити rot A .
8.47.Указівка: див. указівку до задачі 8.44.
8.49.Указівка: спростити вираз (r × )2 u(r ).
8.50.Указівка: виконати операцію rot від обох частин рівняння
рівноваги рідини і скалярно помножити на f .
|
|
|
Π r |
|
|
|
|
4πμ ∂j |
με ∂2 E |
|||||||||
8.51. A = 4π |
|
|
|
. |
|
8.52. |
E − div E − |
|
|
− c2 |
∂t2 = 0, |
|||||||
r3 |
|
|
c2 ∂t |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
H − div H + |
|
4π rot j − εμ ∂2 H = 0 . |
|||
|
|
|
|
|
|
|
4π |
|
|
|
|
|
|
c |
c2 |
∂t2 |
||
8.53. |
|
A = − |
|
j , |
ϕ = −4πρ , де |
– |
оператор |
д'Аламбера, |
||||||||||
|
c |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
≡ |
− |
1 |
|
∂2 |
. |
|
|
|
|
|
|
|
|
|||||
|
c2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
∂t 2 |
|
|
|
|
|
|
|
|
||||||
8.54. Указівка: скористатись результатом задачі 8.52.
114

8.56. E = E0 e−k2 r ei(k1 r −ωt ) , H = H 0 e−k2 r ei(k1 r −ωt) , де
|
|
|
|
|
4πσ |
2 |
1/2 |
|
|
|
|
|
4πσ |
2 |
1/2 |
|
k = ω με |
1+ |
|
|
+1 |
, k |
= ω με |
1+ |
|
−1 , |
|||||||
|
|
|||||||||||||||
1 |
c 2 |
|
|
|
|
|
|
2 |
c |
2 |
εωcosθ |
|
||||
|
|
|
εωcosθ |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ = (k1, k2 ) .
8.58.Φ = ∂ϕ + v2 . ∂t 2
Указівка: якщо врахувати формулу v2 = 2(v )v + 2v ×rot v (див. задачу 8.8), то поле прискорень можна записати у вигляді
dv |
= |
∂v |
+ |
1 |
v2 |
−v ×rot v. Оскільки v = ϕ, то |
dv |
= |
∂ |
ϕ+ |
1 |
v2, |
dt |
∂t |
2 |
dt |
∂t |
2 |
звідки знаходимо відповідний потенціал.
Векторний аналіз у криволінійних координатах
Криволінійні ортогональні координати
9.1. а) Hρ = 1 , H ϕ = ρ , H z = 1 . Приклад обчислення:
∂r |
= |
∂(ρcos ϕ) ex + |
∂(ρsin ϕ) ey + |
∂z |
ez = cos ϕex + sin ϕey , |
||||||
∂ρ |
∂ρ |
||||||||||
|
|
|
|
∂ρ |
|
|
∂ρ |
|
|||
звідки H |
ρ |
= |
|
∂r |
|
= 1 ; |
|
|
|
||
|
|
|
|
|
|||||||
|
|
|
|
∂ρ |
|
|
|
|
|
||
б) |
eρ = ex cos ϕ + e y sin ϕ, |
eϕ = −ex sin ϕ + ey cos ϕ, |
ez = ez ; |
|
в) |
ax |
= aρ cos ϕ − aϕ sin ϕ, |
ay = aρ sin ϕ + aϕ cos ϕ, |
az = az ; |
г) |
ρ = |
x2 + y2 = const –циліндр, tgϕ = y x = const – |
напівплощи- |
|
на, що утворює кут ϕ із площиною xOz та обмежена віссю Oz, z = const – площина.
Через кожну точку проходять три координатні лінії, які можна розглядати як результат перетину відповідних координатних поверхонь: коло (ϕ-лінія, уздовж якої ϕ змінюється у межах від 0 до 2π, ρ і z –фіксовані), напівпряма (ρ – лінія, уздовж якої ρ змінюється у межах від 0 до +∞, ϕ і z – фіксовані), пряма (z-лінія, уздовж якої z змінюється в межах від –∞ до +∞, ϕ і ρ – фіксовані);
115
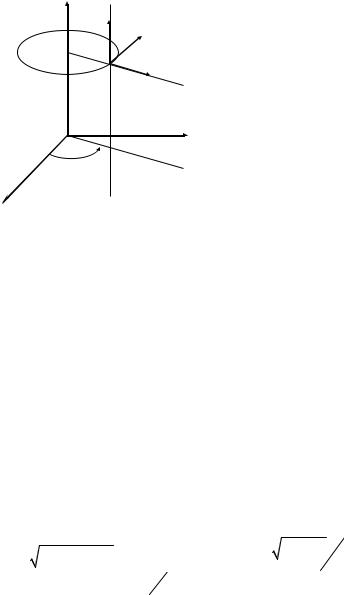
|
|
д) вектори локального базису |
||||||
z |
eGz |
та |
параметри |
Ламе |
можна |
|||
|
знайти геометрично, не кори- |
|||||||
|
eGϕ |
стуючись прямокутною дека- |
||||||
|
eGρ |
ртовою системою координат. |
||||||
ϕ-лінія |
Візьмемо |
довільну |
точку |
|||||
|
M (ρ0 , ϕ0 , z0 ) (див. до рис. 9.1). |
|||||||
|
ρ-лінія |
|||||||
|
Зафіксуємо ϕ, z, змінювати- |
|||||||
|
|
мемо |
ρ. |
Тоді |
радіус-вектор |
|||
ϕ |
у |
r =r(ρ, ϕ0, z0) опише ρ-коорди- |
||||||
|
|
натну лінію. Аналогічно отри- |
||||||
|
|
мують ϕ-, z-координатні лінії, |
||||||
x |
z-лінія |
і, |
таким |
чином |
через |
кожну |
||
точку |
можна |
провести три |
||||||
до задачі. 9.1 |
||||||||
різні координатні лінії. |
|
|||||||
|
|
|
||||||
Якщо ми надаємо приріст радіус-вектору r =r(ρ, ϕ, z) за ρ-ко-
ординатною лінією Δρ, то величина |
∂r |
= |
lim |
r |
= |
lim |
Δρρ |
= |
ρ |
=e |
|
∂ρ |
|
Δρ→0 |
Δρ |
|
Δρ→0 |
Δρρ |
|
ρ |
ρ |
– вектор, дотичний до ρ-координатної лінії, а його довжина Нρ=1.
Якщо ми надаємо приріст радіус-вектору |
r =r(ρ, ϕ, z) за ϕ-ко- |
||||||
ординатною лінією Δφ, то величина |
∂r |
= lim |
|
r |
= lim |
ρΔϕeϕ |
=ρe |
|
|
|
|||||
|
∂ϕ |
Δϕ→0 Δϕ Δϕ→0 |
Δϕ |
ϕ |
|||
|
|
||||||
– вектор, дотичний доϕ-координатної лінії, айогодовжина Нϕ=ρ.
9.2. а) Нr = 1, Нθ = r, Нϕ = rsinθ;
б) er = ex sin θcos ϕ+ ey sin θsin ϕ+ ez cos θ,
eθ = ex cosθcosϕ+ey cosθsinϕ−ez sinθ, eϕ = −ex sinϕ+ey cosϕ; в) ax = ar sin θcos ϕ+ aθ cos θcos ϕ− aϕ sin ϕ,
ay = ar sin θsin ϕ+ aθ cos θsin ϕ+ aϕ cos ϕ, az = ar cos θ−aθ sin θ;
г) r = x2 + y2 + z2 |
= const – сфера, tg θ = x2 + y2 |
z = const – |
||
конічна поверхня, |
tgϕ = |
y |
= const – напівплощина, що утворює |
|
|
|
x |
|
|
|
|
|
116 |
|

кут ϕ (0 ≤ ϕ < 2π) із площиною xOz та обмежена віссю Oz. Через кожну точку із координатами r, θ, ϕ проходить три координатні лінії: коло (ϕ-лінія, вздовж якої ϕ змінюється у межах від 0 до 2π, r і θ – фіксовані), напівпряма (r-лінія, уздовж якої r змінюється у межах від 0 до +∞, ϕ і θ – фіксовані), напівколо (θ-лінія, вздовж якої θ змінюється у межах від 0 до π, а ϕ і r – фіксовані).
|
z |
|
r-лінія |
|
|
eGr |
|
|
|
eGϕ |
|
ϕ-лінія |
θ |
eGθ |
|
|
y |
||
|
|
|
|
|
ϕ |
|
|
|
|
θ-лінія |
|
x |
|
до задачі. 9.2 |
|
|
|
||
9.3. а) H u = H v = u 2 + v2 , Hϕ = uv;
б) eu =
ev =
в) ax =
ay =
|
1 |
|
|
(v(ex cos ϕ + ey sin ϕ) + uez ), |
|||||
|
u 2 + v2 |
|
|
||||||
|
|
|
(u(ex cos ϕ + ey sin ϕ) − vez ) , eϕ = −ex sinϕ+ey cosϕ; |
||||||
|
1 |
|
|
||||||
|
u 2 + v2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
v cos ϕ |
|
|
au + |
u cos ϕ |
|
av − sin ϕaϕ; |
||
|
u2 + v2 |
|
u2 + v2 |
||||||
|
|
|
|
|
|
−vav +uau |
|
||
|
v sin ϕ |
|
|
au + |
u sin ϕ |
|
av + cos ϕaϕ; az = |
; |
|
|
u 2 + v2 |
|
|
u 2 + v2 |
|
|
|||
|
|
|
|
|
|
u2 + v2 |
|||
г) y x = tg ϕ = const – |
напівплощина, |
що утворює кут |
ϕ |
(0 ≤ ϕ < 2π) із площиною xOz та |
обмежена віссю |
Oz, |
|
x2 + y2 + z2 ± z = const |
– параболоїди. Через кожну точку із ко- |
||
координатами u, v, ϕ проходить три координатні лінії: коло (ϕ-лі- нія, уздовж якої ϕ змінюється у межах від 0 до 2π, u та v – фіксовані) та дві напівпараболи, які є результатом перетину координатних поверхонь (напівплощини і відповідного параболоїда).
9.4. H ξ = H η = |
a |
, |
H α = |
|
a sin η |
. |
||
ch ξ − cos η |
|
ch ξ − cos η |
||||||
|
|
|
|
|
|
|||
9.5. Hρ = H ξ = |
|
a |
, |
H α = |
|
a sh ρ |
|
. |
|
ch ρ − cos ξ |
ch ρ − cos ξ |
||||||
|
|
|
|
|
||||
|
|
|
|
117 |
|
|
||

9.6. e |
+ |
= eiϕ (e |
+ ie |
ϕ |
), e = e−iϕ(e −ie ), |
e |
o |
= k . |
|
||||||
|
|
|
ρ |
|
− |
|
ρ |
ϕ |
|
|
|
||||
9.7. e+ = eiϕ (sin θer |
|
+ cos θeθ ) + ieiϕeϕ , |
|
|
|
|
|
||||||||
e |
− |
= e−iϕ (sin θe |
r |
+ cos θe |
θ |
) − ie−iϕ e |
, |
e |
= cos θe |
−sin θe . |
|||||
|
|
|
|
|
|
|
|
ϕ |
0 |
|
r |
θ |
|||
9.8. txx = tρρ cos2 ϕ − 2tρϕ sin ϕcos ϕ + tϕϕ sin 2 ϕ, |
|
||||||||||||||
txy |
= tρρ sin ϕcos ϕ + tρϕ (cos2 ϕ − sin 2 ϕ) − tϕϕ sin ϕcos ϕ, |
||||||||||||||
txz |
= tρz cos ϕ − tϕz sin ϕ, |
|
|
|
|
|
|
|
|||||||
t yy |
= tρρ sin 2 ϕ + 2tρϕ sin ϕcos ϕ + tϕϕ cos2 ϕ, |
|
|||||||||||||
t yz |
= tρz sin ϕ + tϕz cos ϕ, |
tzz = tzz . |
|
|
|
|
|
||||||||
9.9. |
ρeρ + zez |
. |
9.10. ρsin 2ϕ+ρcos 2ϕ. |
|
9.11. ρz(eρ −ez ). |
||||||||||
|
|
||||||||||||||
|
|
ρ2 + z 2 |
|
|
|
|
|
|
|
|
|
|
|
||
9.12. r 2 sin 2ϕcos 2θ. |
|
|
|
|
|
9.13. sin θeϕ. |
|||||||||
9.14.ρ = cϕ, c = const (спіраль Архімеда).
9.15.ϕ = C1, r = 2sin θ+C2. Векторні лінії утворюються перетином двох сімейств поверхонь.
9.16. |
r |
−2 |
= −ln |
|
π |
+ |
θ |
|
+ C1, |
tg |
2 |
ϕ |
tg θ = C 2. |
||
|
|
||||||||||||||
|
|
tg |
4 |
2 |
|
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
9.17. Промені, які виходять із точки розташування заряду.
Диференціальні операції у криволінійних координатах
9.18.а) T = m2(ρ2 +ρ2ϕ2 + z2 ); б) T = m2(r2 +r2θ2 +r2 sin2 θϕ2) ; в) T = m 2 ((u2 + v2 )(u2 + v2 ) + u2v2ϕ2 ).
9.19.T = m 2 (H12 (q1 )2 + H 22 (q2 )2 + H32 (q3 )2 ).
9.20. v = ρe |
+ρϕe |
+ ze |
z |
, a = (ρ − ρϕ2 )e |
+ |
1 d |
(ρ2 ϕ)e |
|
+ ze |
|
. |
||
|
|
|
|
|
|||||||||
ρ dt |
|
|
|||||||||||
ρ |
ϕ |
|
ρ |
|
|
ϕ |
|
z |
|
||||
9.21. v = rer |
+ rθeθ + r sin θϕeϕ , |
|
|
|
|
|
|
|
|
|
|||
a = (r − rθ2 − rϕ2 sin 2 |
θ) er + (rθ + 2rθ − rϕ2 sin θcos θ) eθ + |
|
|
||||||||||
+ (rϕsin θ + 2rϕsin θ + 2rθϕcos θ) eϕ.
118

3
9.22. v = ∑Hiqie(i) ; i=1
|
3 e(i) |
d |
|
∂T |
|
∂T |
|
|||||
a = |
∑ |
|
|
|
|
|
|
− |
|
|
|
, |
|
|
|
|
i |
|
|
||||||
|
|
|
|
|
|
|
∂q |
i |
|
|||
|
i=1 |
Hi dt ∂q |
|
|
|
|
|
|||||
1 3 2
T = ∑ Hi2 (qi ) –
2 i=1
кінетична енергія частинки одиничної маси.
9.23. Указівка: для довільних dqi прирівняти диференціали
df = 3 ∂f dqi = dr f , записавши dr через фізичний базис.
∑i=1 ∂qi
9.24. Указівка: в ортогональній криволінійній системі координат використати результат задачі 9.23 у тотожності rot qi ≡ 0 .
9.25. Указівка: в ортогональній криволінійній системі координат використати результат задачі 9.24 у тотожності div e(1) = div(e(2) ×e(3) ).
9.26. |
e |
= − |
1 |
e |
, e |
= |
− 1 |
|
e , |
|
e |
z |
= 0. |
|
|
|
|
|
|
|
||||
|
ρ |
|
|
|
ρ2 |
ρ |
ϕ |
|
|
1 |
|
ρ2 ϕ |
2 |
|
|
|
|
|
|
|
|
|
||
9.27. |
er |
= − |
|
2 |
er , |
|
eθ = − |
|
|
|
|
eθ − |
ctg θer , |
eϕ = − |
|
|
1 |
|
|
eϕ. |
||||
|
2 |
|
r |
2 |
sin |
2 |
θ |
2 |
r |
2 |
2 |
θ |
||||||||||||
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
sin |
|
|||||||||
9.28. Відмінні від нуля похідні: а) у циліндричній системі коор- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
динат |
|
∂eρ |
|
= e |
, |
|
∂eϕ |
|
= −e |
; |
|
б) у сферичній системі |
координат |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
∂ϕ |
|
|
|
ϕ |
|
|
|
|
∂ϕ |
|
|
|
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂eϕ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
∂e |
|
|
|
∂e |
|
|
|
|
|
|
|
|
|
|
|
|
∂e |
|
|
|
|
|
|
|
|
∂e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
r |
= e , |
|
r |
|
= sin θe |
, |
|
|
|
|
|
θ |
= −e |
, |
|
|
θ |
|
= cos |
θe |
|
, |
|
|
|
|
|
= −sin θe −cos θe . |
||||||||||||||||||||||||||||||
|
∂θ |
|
θ |
|
∂ϕ |
|
|
|
|
|
|
ϕ |
|
|
|
∂θ |
|
|
|
r |
|
|
∂ϕ |
|
|
|
|
|
ϕ |
|
|
|
∂ϕ |
|
|
|
|
|
|
|
r |
|
|
θ |
|||||||||||||||
Указівка: порівнюючи дві формули |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂g |
|
|
|
∂g |
|
|
||||||||||||||||||||||||||||||||||||
|
|
∂e |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
kl |
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
∂g |
ki |
|
|
kj |
|
|
|||||||||||||
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Γij,l = 1 2 |
∑ |
|
k |
|
|
|
|
|
+ |
|
− |
|
ij |
||||||||||||||||||||||
|
|
∂q |
j |
= ∑ ek Γij = ∑ ek g |
|
|
|
H |
2 |
|
|
|
∂q |
j |
∂q |
i |
∂q |
k = |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
k |
|
|
|
|
|
|
k ,l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
k |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∂H j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
= e |
|
|
∂H |
i |
+e |
|
|
|
|
|
|
−δ |
|
H |
H |
|
|
та |
|
|
∂e |
|
|
|
|
∂H |
|
|
|
∂e(i) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
= e |
|
|
|
i + H |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂qi |
|
|
|
|
|
|
|
∂q j |
|
|
|
i ∂q j |
|||||||||||||||||||||||||||||
|
|
|
|
|
(i) ∂q j |
|
|
|
( j) |
|
|
|
|
|
|
|
|
ij |
|
i |
|
|
|
i |
|
|
|
|
|
|
|
(i) ∂q j |
|
||||||||||||||||||||||||||
знаходимо |
|
∂e(i) |
= |
e( j) |
|
∂H j |
|
− δij Hi . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
∂qi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
∂q j |
|
|
|
|
|
Hi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
∂u |
|
|
|
|
|
|
|
|
|
|
|
|
|
∂u |
|
|
|
|
u |
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂u |
ϕ |
|
|
||||||
9.29. u |
|
= |
|
|
ρ |
, |
|
u |
= |
|
1 |
|
|
ϕ |
+ |
ρ |
, |
u |
= |
|
uz |
, |
|
2u |
|
|
|
= |
|
1 |
∂uz |
+ |
|
; |
|
||||||||||||||||||||||||
|
|
|
ρρ |
|
|
|
∂ρ |
|
|
ϕϕ |
|
|
|
|
ρ ∂ϕ |
|
|
|
|
ρ |
|
|
|
zz |
|
∂z |
|
|
|
|
|
ϕz |
|
|
|
ρ ∂ϕ |
|
∂z |
|
|
|||||||||||||||||||
|
|
2uρz = |
|
∂uρ |
|
+ |
∂u |
z |
, |
|
|
2uρϕ |
= |
|
∂uϕ |
|
− |
uϕ |
+ |
1 ∂uρ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
∂z |
|
|
|
|
|
|
|
|
∂ρ |
|
|
ρ |
|
ρ ∂ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∂ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
119 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

9.30. u |
= |
∂ur |
, u |
|
1 |
∂u |
u |
|
|
1 |
|
∂uϕ |
|
u |
u |
||
∂r |
= |
|
|
θ + |
r |
, u |
= |
|
|
|
+ |
θ ctg θ+ |
r , |
||||
r |
r |
rsin θ ∂ϕ |
|||||||||||||||
rr |
|
θθ |
|
∂θ |
ϕϕ |
|
|
r |
r |
||||||||
|
1 |
|
∂uϕ |
|
|
|
|
|
|
|
1 |
|
∂uθ |
|
|
|
|
|
|
|
|||
2uθϕ = |
|
|
|
|
|
|
−uϕ ctg θ |
+ |
|
|
|
, |
|
|
|
|
|
|
|||||
|
r |
∂θ |
|
r sin θ ∂ϕ |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∂uϕ |
|
uϕ |
|
|||||||
2urθ = |
∂u |
θ − |
u |
θ |
+ |
1 |
∂u |
r , |
2uϕr = |
1 |
|
∂u |
r + |
− |
. |
||||||||
|
|
|
|
|
|
r |
|
|
|
|
|
∂r |
r |
||||||||||
|
|
∂r |
|
|
r |
∂θ |
|
|
r sin θ ∂ϕ |
|
|
||||||||||||
9.31. Відповідь:
|
1 |
|
1 ∂u(i) |
|
1 ∂u( j) |
|
|
1 |
|
|||||||||
u(ij ) = |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
− |
|
|
|
2 |
H |
|
|
∂q |
j |
H |
|
|
∂q |
i |
2H |
H |
|
|||||
|
|
j |
|
|
|
i |
|
|
|
|
j |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ δij H1i (u )Hi .
|
∂H j |
|
∂H |
|
|
||
u( j) |
|
|
+ u(i) |
|
ji |
+ |
|
∂q |
i |
∂q |
|||||
|
|
|
|
|
|
||
Указівка: із означення (див. задачу 9.29) маємо
δl |
= s (s )u = |
3 |
e(i) |
|
∂ |
(u(k )e(k ) ) , |
|
∑ s(i) s( j) |
|
||||||
l |
H j |
j |
|||||
|
i, j,k =1 |
|
∂q |
||||
компоненти тензора деформацій зручно знаходити за формула-
ми u ij |
|
= |
1 |
(ω(ij) + ω( ji) ), |
де ω(ij) = |
1 |
|
∂u (i) |
|
) |
|
|
|
|
|
||||
|
|
|
j |
||||||
( |
|
2 |
|
|
|
|
∂q |
||
|
|
|
|
|
H j |
|
|||
|
3 |
|
∂e |
|
|
|
|
∑ |
|
|
|
|
|
|
|
|
j |
|
||
+ |
|
u(k )e(i) |
(k ) |
|
, |
|
|
|
|||||
|
k =1 |
|
∂q |
|
|
|
користуючись результатами задачі 9.28 для відповідних криволінійних систем; можна також використати представлення тензора деформацій через коваріантні похідні від вектора зміщень
u |
ij |
= 1 |
2 |
(u |
|
j,i |
+ u |
i, j |
) |
та відповідні фізичні компоненти |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
uij |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
u(ij) |
= |
|
|
= |
|
|
|
(ui, j |
|
+ u j,i ) , |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Hi H j |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Hi H j |
|
|
|
|
|
|
|
|
|
|||||||
оскільки u |
ij |
e i |
e j = |
|
|
uij |
e |
|
e |
= u |
|
|
e |
|
e |
. |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Hi H j |
(i) |
|
|
( j) |
|
|
(ij) (i) |
|
|
( j) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
f |
= |
|
|
|
|
|
|
|
1 |
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
∂f |
+ |
|
|
||||||
9.32. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r(a + r cos θ) |
|
|
|
|
|
||||||||||||||
|
|
|
r(a |
+ r cos θ) ∂r |
|
|
|
|
|
|
|
∂r |
2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
1 |
∂ |
|
|
|
|
|
|
|
|
|
|
∂f |
|
|
r |
|
|
|
∂ |
|
f |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
+ |
|
|
|
|
|
(a |
+ r cos θ) |
|
|
+ |
|
|
|
|
|
|
|
|
|
2 |
. |
|
|||||||||
|
|
|
|
r |
|
|
|
a + r cos θ ∂ϕ |
|
||||||||||||||||||||||||||
|
|
|
|
|
∂θ |
|
|
|
|
|
|
|
|
∂θ |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
|
|
|