

10.4.Пересечение поверхности прямой линией
В общем случае для построения точек пересечения прямой с поверхностью применяется метод вспомогательных секущих плоскостей по следующему алгоритму(рис.78):
1.
Прямая l
заключается
в плоскость ,
пересекающую поверхность Ф
по геометрически простой линии: l
![]() Ф.
Ф.
2.
Строится линия m
пересечения поверхности Ф
вспомогательной
плоскостью
:. m
=
![]() Ф.
Ф.
3.
Искомые точки 1
и 2
находим как результат пересечения
заданной прямой l
с построенной линией пересечения m:
1,2
= l
![]() m.
m.
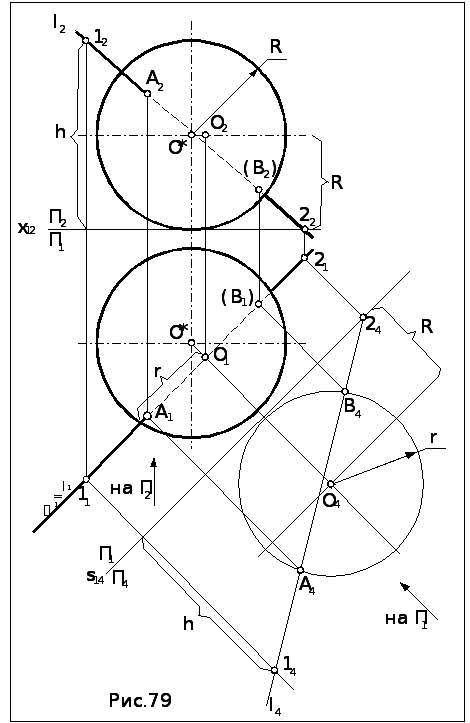
Задача. Построить точки пересечения прямой l с поверхностью сферы Ф (О*,R) (рис.79).
 Алгоритм
решения
Алгоритм
решения
1. Заключаем прямую l в горизонтально проецирующую плоскость : l1= 1.
2.
Строим линию пересечения плоскости
со
сферой – окружность (О,
r).
На П1
окружность проецируется в виде отрезка,
расположенного внутри очерка сферы на
вырожденной проекции 1
. Разделив отрезок пополам, находим
проекцию центра О1
и радиус
r
сечения. На П2
окружность проецируется в виде эллипса,
т.к.
наклонена к П2
.
Построение эллипса - графически довольно
сложная задача. Поэтому для упрощения
решения вводим дополнительную плоскость
П4,
расположив её параллельно
, и переходим к новой системе плоскостей
проекций П1
/
П4
:
П2
![]() П4
П4
![]() ,
,
П1
/ П2
(x12)
![]() П1
/П4
( s14
П1
/П4
( s14
![]() 1
)
1
)
Строим в П4 проекцию окружности, находя проекцию её центра по алгоритму построения точки в дополнительную плоскость.
Взяв на прямой l произвольные точки 1 и 2, строим их проекции на П4 , соединив которые получаем проекцию прямой l4
3. Находим точки А и В пересечения прямой l со сферой, сначала на П4 как результат пересечения l4 с проекцией окружности (О4 , r ), а затем по принадлежности прямой l на остальных плоскостях проекций.
4. Видимость точек А и В и прямой l определяем по представлению, рассматривая проекции совместно с направлением взгляда на соответствующую плоскость проекций, как это показано на рис.78.
11. Взаимное пересечение поверхностей
11.1.Пересечение криволинейной и гранной поверхностей
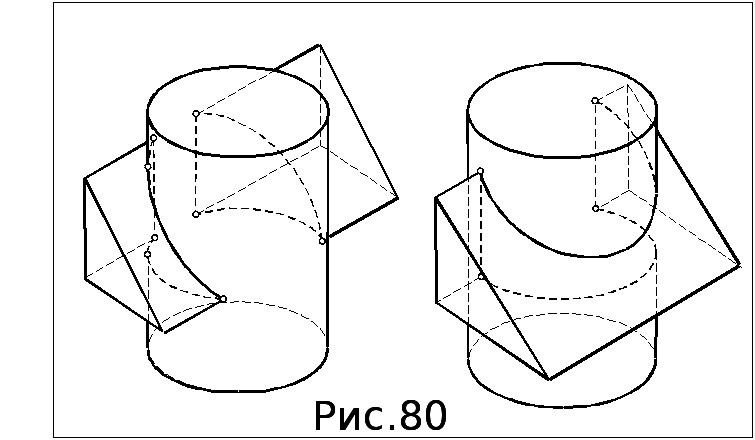 Линией
пересечения (ЛП) криволинейной и гранной
поверхностей является пространственная
замкнутая ломаная, вершинами которой
являются точки пересечения ребер
многогранника с криволинейной
поверхностью, а звенья - линии пересечения
криволинейной поверхности с гранями
многогранника. В случае врезки ЛП состоит
из одной ломаной, в случае проницания
- из двух (рис.80).
Линией
пересечения (ЛП) криволинейной и гранной
поверхностей является пространственная
замкнутая ломаная, вершинами которой
являются точки пересечения ребер
многогранника с криволинейной
поверхностью, а звенья - линии пересечения
криволинейной поверхности с гранями
многогранника. В случае врезки ЛП состоит
из одной ломаной, в случае проницания
- из двух (рис.80).
Особые точки ЛП:
вершины ломаной – точки пересечения ребер многогранника с поверхностью вращения;
опорные точки (граничные точки видимости) - точки пересечения очерковых образующих криволинейной поверхности с гранной поверхностью;
особые точки кривых - звеньев ЛП: центры, вершины, точки на концах осей и т.д.
 Построение
ЛП сводится к двум выше уже рассмотренным
выше задачам: а) построить точки
пересечения прямой с поверхностью и б)
построить сечение поверхности плоскостью.
Построение
ЛП сводится к двум выше уже рассмотренным
выше задачам: а) построить точки
пересечения прямой с поверхностью и б)
построить сечение поверхности плоскостью.
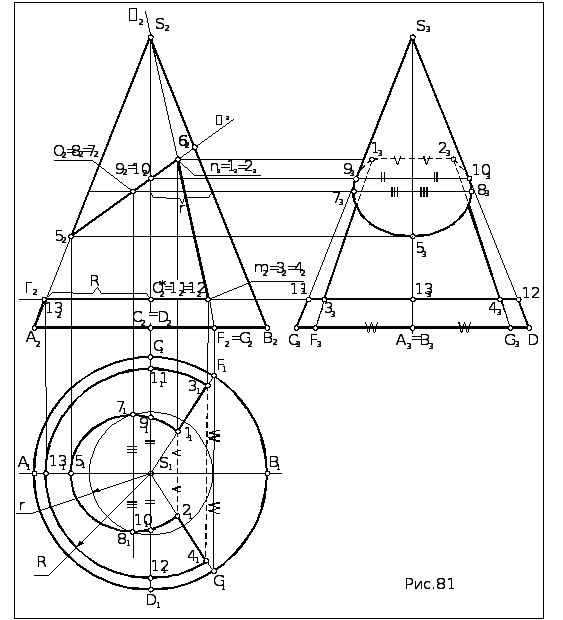
Задача. Построить проекции конуса с призматическим вырезом (рис.81).
Алгоритм решения
1. Определяем тип линии пересечения (ЛП). Т.к. ни одна из поверхностей не пересекает другую полностью, то данный случай - врезка и ЛП состоит из одной ломаной. Звенья ЛП - конические сечения: грань призмы Г(Г2 ), перпендикулярная оси конуса, пересекает конус по дуге окружности; грань призмы (2) , плоскость которой проходит через вершину конуса, - по образующим конуса; грань призмы (2) , наклоненная к оси конуса (),- по дуге эллипса.
Т.к. грани призмы фронтально проецирующие, то на П2 проекция ЛП совпадает с проекцией призматического выреза.
2. Находим особые точки ЛП сначала на известной фронтальной проекции:
-вершины ломаной – точки пересечения ребер n и m c поверхностью конуса - совпадают с проекциями самих ребер, т.к. ребра – фронтально проецирующие: n2 = 12 =22, m2 = 32 =42.
-центр О(О2) и точки на концах осей эллипса. Продлив грань (2) до пересечения с очерковой образующей S2 B2 находим фронтальную проекцию большой оси эллипса 52 62 , разделив которую пополам находим центр О(О2) и точки 72= 82 на концах малой оси.
-
граничные точки видимости находим как
результат пересечения вырожденных
про-екций граней призматического
отверстия с очерковыми образующими
конуса: граничные точки видимости на
П2
– 52
=
S2А2
![]() 2
, 132
=
S2А2
2
, 132
=
S2А2![]() Г2
,
граничные точки видимости на
Г2
,
граничные точки видимости на
П3
–
92
=
S2
C2
![]() 2
,
102
=
S2
D2
2
,
102
=
S2
D2
![]() 2
,
112
=
S2
C2
2
,
112
=
S2
C2
![]() Г2
,
122
= S2
D2
Г2
,
122
= S2
D2
![]() Г2.
Г2.
На остальных проекциях найденные на П2 точки находим либо по их принадлеж-ности образующим, на которых они расположены, либо по их принадлежности конусу. Например, точки 7 и 8 находим, проведя параллель радиуса r. При этом для достижения требуемой точности построений не рекомендуется пользоваться постоянной чертежа к0 и ломаными линиями связи между П1 и П3 (см. задачу на рис.77).
3. Случайные точки (на дуге эллипса) выбираем произвольно на П2 , а другие их проекции находим по принадлежности поверхности конуса, как точки 7,8.
4. Построенные точки соединяем с учетом их видимости на проекциях, определяя ви-димость по представлению. При взгляде сверху ЛП видима полностью, не видны только ребра m и n отверстия. На П2 видимые и невидимые части ЛП совпадают. При взгляде слева (на П3) видимы части ЛП, лежащие на левой половине конуса, а также участки пря-мых (13) и (24) из-за отсутствия материала, их закрывающего.