

Электропневмоавтоматика 2
.pdf9
Глава 1
Рис. 1.3: |
|
|
Сборочное |
устройство |
|
для |
надевания |
|
крышек |
на |
банки |
Система управления должна оценивать и обрабатывать информацию (например, кнопка нажата или не нажата). Эта информация пред ставляется в виде сигналов.
Сигнал — это физическая переменная, например, такая как:
•Давление в какой-то точке пневматической части системы
•Напряжение в какой-то точке электрической части системы.
Festo Didactic - ТР201
10
Глава 1
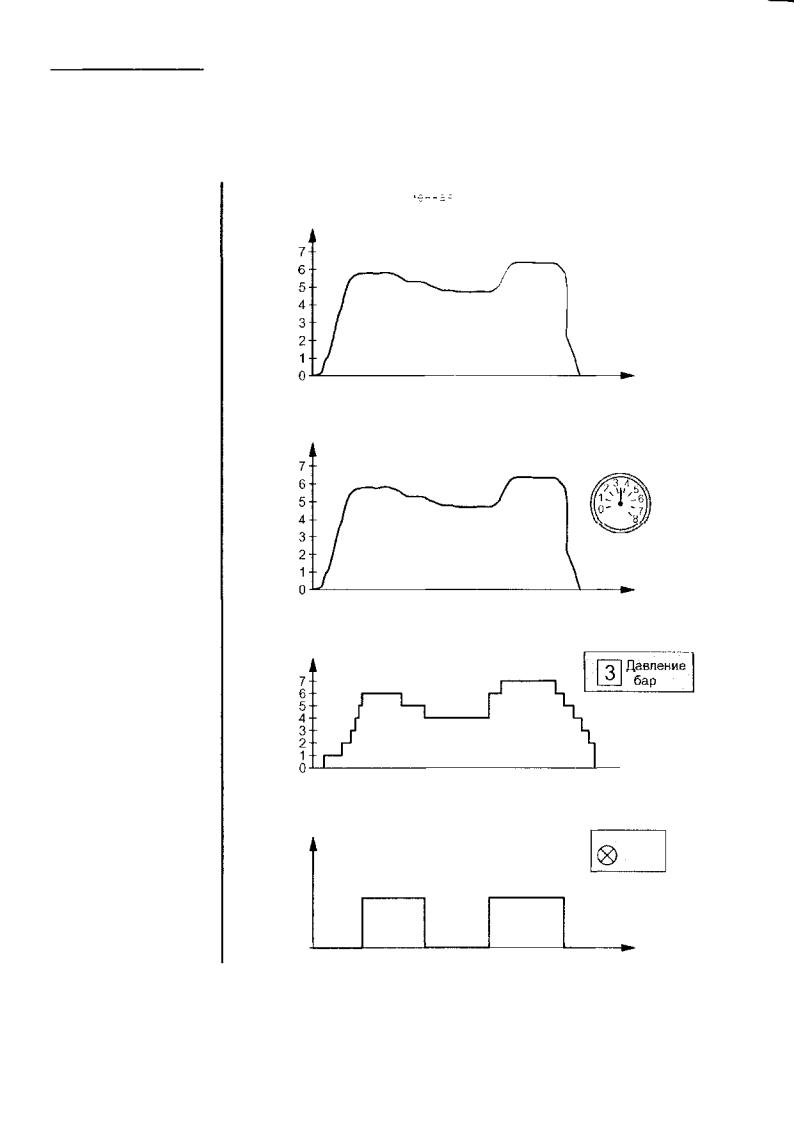
Рис. 1.4: Сигнал и информация
С и г н а л / Ф и з и ч е с к ая neper;
Давление
Информация а) Аналоговый
Положение указателя
б) Цифровой
Дисплей
в) Бинарный Давление
Есть 1 --
Нет О
Время
Время
•Время
Давление
.литании
В р е м я
ТР201 - Festo Didactic

11
Глава 1
Сигнал является представлением информации, которое может выражать ся посредством значения или рядом значений физической переменной.
Аналоговый сигнал — это сигнал, в котором информация непрерывно |
Аналоговый сигнал |
изменяется от точки к точке на всем протяжении значений параметра |
|
сигнала (DIN 19226, Часть 5). |
|
На манометре каждое значение давления (информационный параметр) |
Пример применения |
отображается стрелкой на непрерывной шкале. Если сигнал растет |
|
или падает, информация изменяется непрерывно. |
|
Цифровой сигнал — это сигнал с конечным числом значений информа- |
Цифровой сигнал |
ционного параметра. Каждое значение несет определенную информацию |
|
(DIN 19226, Часть 5). |
|
Система по измерению давления с цифровым дисплеем показывает |
При\*ес ~ с . ° / е - е - / - |
повышение давления с шагом 1 бар. Для диапазона давления до 7 бар |
|
у дисплея имеется всего 8 значений (от 0 до 7). Эти восемь значений |
|
охватывают весь диапазон изменения информационного параметра. |
|
Если сигнал растет или падает, информация изменяется ступенчато. |
|
Бинарный (двоичный) сигнал — этот сигнал только с двумя значениями |
Бинарный сигнал |
для информационного параметра. Обычно они обозначаются как "О" и " 1 " |
|
(DIN 19226, Часть 5). |
|
Сигнальная лампа показывает подается ли в систему сжатый воздух |
Пример применения |
под нужным давлением. Если давление питания (=сигнал) ниже 5 бар |
|
пампа выключается (статус 0). Если давление выше 5 бар — лампа |
|
включается (статус 1). |
|
Festo Didactic • ТР201
Глава 1
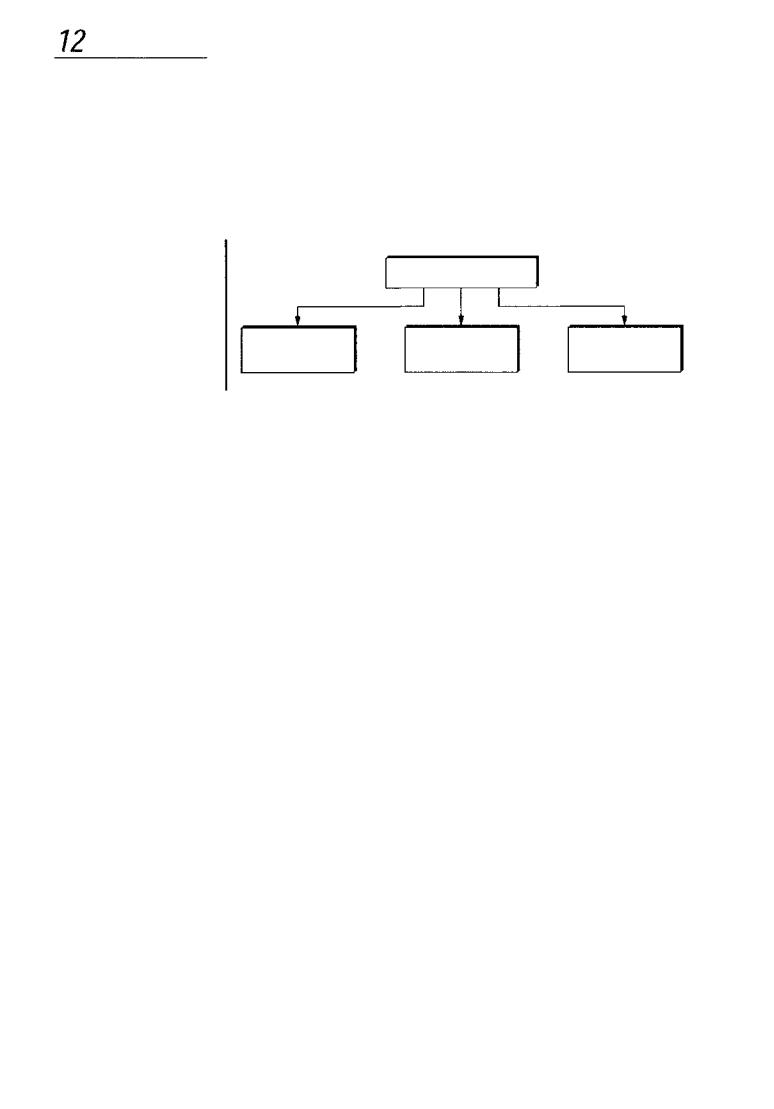
Классификация систем В соответствии с типом представления информации системы управления по типу управления подразделяются на аналоговые, цифровые и бинарные
представления (DIN 19226, Часть 5). информации
С и с т е м ы управления
|
Рис. |
1.5: |
Б и н а р н ые |
Аналоговые |
Цифровые |
|
Классификация |
систем |
|||||
|
|
|
||||
управления |
по |
типу |
|
|
|
|
представления |
информации |
|
|
|
||
Логическая система |
Логический контроллер генерирует выходные сигналы как результат |
управления |
логических действий над входными сигналами. |
Пример применения |
Сборочное устройство на рис . 1.3 может у п р а в л я т ь с я и з д в у х п о з и ц и й . |
|
Эти два сигнала логически связаны. Шток цилиндра выдвигается, |
|
если нажать на кнопку 1 или 2 или на обе сразу. |
Последовательная |
Такая система характеризуется работой шаг за шагом. Следующий |
система управления |
шаг выполняется только после того, как выполнятся определенные |
|
критерии. |
Пример применения |
Станция сверления. Первый шаг — зажим заготовки. Как только шток |
|
зажимного цилиндра достигнет крайнего выдвинутого положения, |
|
первый шаг закончен. Второй шаг — подвод сверла. Когда и это движение |
|
будет завершено (шток приводного цилиндра сверла выдвинется |
|
полностью), выполняется третий шаг и т. д. |
ТР201 - Festo Didactic

13
Глава 1
Система управления может быть разделена на части, выполняющие раз- |
Поток сигналов в |
личные функции: ввода сигналов, обработки сигналов, вывода сигналов |
системе управления |
и выполнения команд. Взаимодействие этих частей видно из струк |
|
турной схемы потока сигналов. |
|
•Входные сигналы логически обрабатываются. Ввод и обработка производятся с использованием небольшой мощности. Обе эти части входят в подсистему обработки сигналов
•В части вывода сигналы усиливаются по мощности. Здесь форми руется связь между подсистемой обработки и исполнительной подсистемой
•Выполнение команд производится с использованием большой мощ ности — для того, чтобы получить высокую скорость (например, при извлечении заготовки из станка) или большое усилие (например, в прессе). Выполнение команд производится исполнительной подси стемой системы управления.
|
|
|
о; |
|
|
|
|
|
|
|
со |
со |
|
|
|
В ы п о л н е н ие команд |
i |
|
|
|
|||
-О |
|
|
|
|
|||
|
|
|
фС |
(—о |
|
|
|
|
|
|
1— |
о |
|
|
|
|
|
|
X |
о |
|
|
|
|
|
|
с |
а |
|
|
|
|
|
|
о |
о |
|
|
|
|
Вывод сигналов |
с: |
с |
|
|
|
|
|
о |
ш |
|
|
|
||
|
|
1 |
251 |
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
с: |
|
|
|
|
|
|
СО со |
|
|
|
|
|
|
|
О) |
X |
|
|
|
Обработка сигналов |
о |
|
|
|
|||
ст |
|
|
|
||||
|
|
I |
S |
S |
|
|
|
|
|
о |
аб |
|
|
|
|
|
|
|
а: |
1- |
|
|
|
|
|
|
о |
о |
|
|
|
|
Ввод сигналов |
|
О- |
Рис. |
1.6: |
|
|
|
|
ю |
|
||||
|
|
|
|
о |
Поток |
сигналов в |
|
|
|
|
|
|
системе |
управления |
|
Элементы на принципиальной схеме чисто пневматической системы управления располагаются таким образом, что поток сигналов очевиден
— снизу вверх: элементы ввода сигналов (такие как распределители с ручным управлением), логические элементы (например, клапан "И"), элементы вывода сигналов (мощные распределители, например, 5/2) и, наконец, исполнительные (пневмоцилиндры).
Festo Didactic - ТР201

14
Глава 1
1.3. Пневматические Как пневматические, так и электропневматические системы имеют и электро- пневматическую исполнительную подсистему (см. рис. 1.7 и 1.8). Но
пневматические подсистемы обработки сигналов у них разные:
системы управления
•В пневматических системах управления используются пневматические элементы, такие как, различные клапаны и распределители, устройства последовательности, пневмобарьеры и т. п.
•В электропневматических системах часть, занятая обработкой сиг налов, состоит из электрических устройств, например, электрических кнопок, датчиков положения, реле или программируемых логических контроллеров.
Распределители образуют интерфейс между сигнальной подсистемой и пневматической исполнительной в обоих случаях.
|
|
|
|
|
Исполнительные устройства |
|
|
|
|
|
|
Выполнение |
Цилиндры |
|
|
|
|
|
|
|
Поворотные цилиндры |
|
|
|
||
|
|
|
команд |
|
|
|
||
|
|
|
Пневмомоторы |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оптические дисплеи |
|
|
|
|
|
|
|
|
Конечные элементы |
|
|
|
|
|
|
Вы ход сигналов |
управления |
|
|
|
|
|
|
|
|
1 |
Распределители |
|
|
|
|
|
|
|
Процессорные элементы |
-О |
|||
|
|
|
|
|
||||
|
|
|
Обработка |
Распределители |
||||
|
|
|
Элементы "ИЛИ" |
|
|
|
||
|
|
|
сигналов |
Элементы "И" |
1 — г |
|||
|
|
|
|
|
Клапаны давления |
|||
|
|
|
|
|
Клапан ы последовательности |
J |
|
L |
|
|
|
|
|
|
|||
|
|
|
|
|
Входные элементы |
|
|
|
|
|
|
Ввод сигналов |
Распределители |
|
|
|
|
|
|
|
(с механическим и ручным управлением) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пневмодатчики |
|
|
|
|
|
Рис. 1.7: |
|
|
|
|
|
|
|
Поток |
сигналов |
|
|
|
|
|
|
и |
элементы в |
пневмати |
Поток сигналов |
Пневматические элементы |
|
|
|
|
ческой |
системе |
управления |
|
|
|
|||
|
|
|
|
|
|
|||
н |
|
о |
|
ю |
|
Cгоl |
|
ю |
|
о |
|
го |
|
ф |
|
деист |
1алов |
о |
L_ |
с |
s |
о: |
о |
^со |
|
о |
|
CD |
|
т |
|
го |
|
5 |
|
со |
|
CD |
|
X |
|
tz |
|
TP201 • Festo Didactic

Выполнение
команд
Выход сигналов
Обработка
сигналов
Ввод сигналов
Поток сигналов
15
Гпава 1
Исполнительные устройства
Цилиндры •
Поворотные цилиндры Пневмомоторы:
Оптические дисплеи
о о
Коне ч н ые элементы управлений
Распределители с
электромагнитным |
V V |
управлением |
|
Процессорные элементы
Репе
Контакторы Программируемые логи- : чес кие контроллеры
Входные элементы |
CD О |
|
|
Кнопки |
|
|
|
Переключатели |
|
|
|
Концевые выключатели |
Ф |
|
|
с; |
|
|
|
Герконы |
О) |
|
|
Датчики положения |
|
|
|
(индуктивные, емкост |
|
|
|
ные, оптические) |
|
|
|
Датчики давления . |
|
|
|
|
Рис. |
1.8: |
|
Электропневматические |
Поток |
сигналов |
|
и |
элементы |
||
элементы |
электропневма ти ческой |
||
|
системы |
управления |
|
Festo Didactic • ТР201

16
Глава 1
В отличие от чисто пневматической системы управления, электро пневматическая система не может быть изображена на одной прин ципиальной схеме, а требует наличия двух — одной пневматической и другой электрической. Поэтому поток сигналов нельзя проследить непосредственно на одной схеме.
Структура и принцип |
На рис. 1.9 показана структура и принцип работы электропневмати- |
|
работы |
ческой системы, |
|
электропневматической |
|
|
системы управления |
Л |
Электрическая подсистема обработки сигналов переключает |
|
|
распределители с электромагнитным управлением |
|
• Распределители заставляют выдвигаться и втягиваться штоки |
|
|
|
цилиндров |
|
• |
Положение штоков регистрируется электрическими датчиками по |
|
|
ложения, входящими в состав подсистемы обработки сигналов. |
Электрическая подсистема обработки сигналов
Рис. 1.9: |
|
|
|
|
Структура |
и |
принцип работы |
электропневматической |
системы управления |
ТР201 • Festo Didactic

17
Глава 1
Электропневматические системы имеют над чисто пневматическими |
1.4. Преимущества |
следующие преимущества: |
электропневма |
|
тических систем |
•Большая надежность (меньше подвижных частей, подверженных износу)
•Меньшая стоимость проектирования и ввода в эксплуатацию, особенно в случае сложных систем
•Меньшие расходы на монтаж, особенно при использовании совре менных элементов, таких как пневмоострова
•Более простой обмен информацией между несколькими системами управления.
Электропневматические системы сейчас более широко применятся в промышленной практике, а пневматические используются ограниченно, в основном в специальных применениях.
Festo Didactic • ТР201

Глава 1