

Geodeziya_1_chastina_26-09-2011
.pdf411
мережі повинна бути орієнтована так, щоби необхідна кількість орієнтувань дорівнювало кількості всіх сторін.
Отже,
R1 = Р – S1, |
(6.32) |
де R1 – кількість незалежних кутових умов; Р – кількість відомих орієнтувань (вихідних дирекційних кутів, виміряних азимутів, кутів і т. ін.); S1 – кількість необхідних орієнтувань, що дорівнює кількості всіх сторін мережі (вихідних і шуканих).
Кожний пункт визначається на поверхні двома лінійними елементами: вихідний – абсцисою і ординатою; шуканий – двома обчисленими або виміряними сторонами. Будь-який надлишковий лінійний елемент викликає незалежну синусну умову.
Рис. 172. До прикладу аналітичного визначення кількості незалежних умов
Отже, кількість незалежних синусних умов R2 можна обчислити за формулою
R2 = S2 – 2М, |
(6.33) |
де S2 – кількість усіх відомих лінійних елементів (абсцис і ординат вихідних пунктів, обчислюваних і виміряних сторін); М – кількість всіх пунктів.
Контролем аналітичного визначення кількості куто-
вих і синусних умов служить рівність |
|
R1 + R2 = R. |
(6.34) |
412
Нехай у мережі, зображеній на рис. 172, пункти А, В, С, D і Е – вихідні, на пункті F виміряний азимут, окрім того, виміряна одна сторона b і кути, позначені цифрами. Тоді матимемо
всього відомих незалежних елементів:
вихідних координат |
2 х 5 = 10 |
виміряних кутів |
36 |
виміряних сторін |
1 |
виміряних азимутів |
1 |
|
N = 48 |
необхідних елементів |
2М = 2 х 11 = 22 |
усіх незалежних умов |
R = N – 2М = 26 |
усього відомих орієнтувань: |
|
вихідних дирекційних кутів |
3 |
виміряних кутів |
36 |
виміряних азимутів |
1 |
|
Р = 40 |
необхідних орієнтувань (кількість всіх сторін) S1 = 23 |
|
кутових умов |
R1 = Р – S1 = 17 |
усього відомих лінійних елементів: |
|
вихідних абсцис і ординат |
2 х 5 = 10 |
обчислюваних сторін |
= 20 |
виміряних сторін |
= 1 |
необхідних лінійних елементів |
S2 = 31 |
2М = 2 х 11 = 22 |
|
синусних умов |
R2 = S2 – 2М = 9 |
контроль |
17 + 9 = 26 |
Необхідно мати на увазі, що формули (6.31) – (6.33) не є універсальними, оскільки не дають правильної відповіді, якщо в геодезичну мережу, яка вирівнюється включені пункти, відстеженні напрямки з яких є односторонніми (наприклад, пункти, визначені зворотними засічками).
413
Якщо в тріангуляції вирівнюються не кути, а напрямки, то кількість необхідних елементів складе 3М замість 2М, як це було при вирівнюванні кутів, позаяк на кожній станції один напрямок необхідний для орієнтування всього пучка напрямку.
Отже, формула (6.31) для визначення кількості всіх не-
залежних умов при вирівнюванні напрямків матиме вигляд
R' = N' – 3М, (6.35)
де N' – кількість усіх незалежних відомих елементів мережі (абсцис і ординат, виміряних напрямків, сторін, азимутів і т. ін.).
Орієнтуючі напрямки входять до числа необхідних елементів, тому кількість кутових умов R'1 визначається за формулою
R'1 = Р' – S1 – М, |
(6.36) |
де Р' – кількість відомих орієнтувань (вихідних дирекційних кутів, виміряних азимутів і напрямків).
Підрахунок кількості синусних умов при вирівнюванні напрямків здійснюється за тією ж формулою (6.33), що і при вирівнюванні кутів.
17. Обчислення допустимих вільних членів умовних рівнянь
Під допустимими величинами вільних членів умовних рівнянь прийнято розуміти граничні помилки тих функцій, за якими обчислюються фактичні значення вільних членів. Виходячи з цього, виводяться формули для обчислення допустимих вільних членів умовних рівнянь полюсів, базисів і дирекційних кутів.
17.1. Умова полюса
Для виведення формули допустимого вільного члена умовного рівняння полюса (ωп)доп, за аналогією з форму-
414
лою (6.16), запишемо у загальному вигляді функцію ωп, за якою обчислюються вільні члени полюсів
ωп = (lg sin A1 + lg sin A3 + … + lg sin An-1) – - (lg sin A2 + lg sin A4 + … + lg sin An),
де А1, А2, … Ап – виміряні кути.
Замінивши десяткові логарифми цього рівняння через натуральні за формулою
lg sin A = M · ln sin A,
де М – модуль Бриггових (десяткових) логарифмів, отримаємо
ωn = M [(ln sin A1 + ln sin A3 +… + ln sin An-1) – - (ln sin A2 + ln sin A4 + … + ln sin An)].
Здійснивши диференціювання отриманого рівняння за аргументами А1, А2,…,Ап і замінивши диференціали істинними помилками, будемо мати
∆ωп = M [(ctg A1·∆A1 + ctg A3·∆A3 +… + ctg An-1·∆An-1)
–
-(ctg A2·∆A2 + ctg A4·∆A4 + … + ctg An·∆An)].
Уцьому рівнянні ∆А1, ∆А2, … , ∆Ап – істинні помилки
кутів у радіанній мірі. Якщо ж виразити їх в секундах дуги, знаючи, що
∆А = ( A)" ,
то
∆ωп = M ctgA" 1 ( А1)" M ctgA" 3 ( А3 )" ...
M ctgA" 2 ( A2 )" M ctgA" 4 ( А4 )" ... (6.38)
Врівнянні (6.38) вирази
M ctgA1 |
, |
M ctgA2 |
, ... , |
M ctgAn |
(6.39) |
" |
|
" |
|
" |
|
являють собою зміни десяткових логарифмів синусів кутів, які відповідають зміні самих кутів на 1″. Насправді,

415
lg sin A = M ln sin A;
d lg sin A = M · ctg A · dA;
∆lg sin A = M ctgA" ( А)" ,
апри (∆А)″ = 1″
∆lg sin A = M ctgA" .
Позначивши зміни (6.39) відповідно через β1, β2, …, βп
і враховуючи ці позначення в рівнянні (6.38), отримаємо
∆ωп = β1(∆А1)″ + β3(∆А3)″ + … + βп-1(∆Ап-1)″ - β2(∆А2) ″– β4(∆А4)″ - … - βп(Ап)″.
Переходячи тепер від співвідношення істинних помилок функції і аргументів до відповідних співвідношень квадратичних помилок, знайдемо
m2 |
2 |
2 |
2 |
2 |
2 |
2 |
... 2 |
2 |
, |
(6.40) |
n |
1 |
1 |
2 |
2 |
3 |
3 |
n |
n |
|
|
де тп і μ – середні квадратичні помилки відповідно функції ωп і вимірювання кута А.
Вважаючи помилки вимірювання кутів рівними між собою, тобто μ1 = μ2 = μ3 =… = μп = μ, рівняння (6.40) мож-
на перетворити в таке: |
2 . |
|
m |
(6.41) |
|
n |
|
|
Вважаючи (ωп)доп = 2.5 тп, остаточно отримаємо формулу для визначення допустимої величини вільного члена
умовного рівняння полюса |
2 , |
|
( n )доп 2.5 |
(6.42) |
де μ − середня квадратична помилка вимірювання кута.
17.2. Умова базисів
Для виведення формули допустимого вільного члена умовного рівняння базисів (ωs)доп подібно до виразу (6.24), запишемо в загальному вигляді функцію, за якою обчислюється вільний член цього рівняння базисів (позначивши
416
при цьому всі зв’язкові кути порядковими номерами від 1 до п),
ωs = lg S1 + lg sin A1 + lg sin A3 + … − lg S2 –
− lg sin A2 – lg sin A4 − …, (6.43)
де S1 і S2 – вихідні сторони тріангуляції. Диференціюючи рівняння (6.43) і замінивши диферен-
ціали істинними помилками, отримаємо
|
s |
lg S |
|
|
M ctg A1 |
( А)" |
M ctg A3 |
( А )" ... lg S |
2 |
|
|||||||
|
|
|
|
||||||||||||||
|
|
1 |
|
|
|
" |
1 |
|
" |
3 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
M ctg A2 |
( A )" |
M ctg A4 |
|
( A )" ... |
|
|
|
|||||||||
|
|
|
|
|
|||||||||||||
|
|
|
" |
|
2 |
|
|
" |
|
4 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Переходячи зараз від істинних помилок функції і аргументів до їх середніх квадратичних помилок і позначивши зміни логарифмів синусів відповідних кутів через β1, β2, β3, …, βп, знайдемо
mb2 ms21 12 12 32 32 ... ms22 22 22 42 42 ...,
а вважаючи, що
ms1 ms2 ms і 1 2 ... n ,
отримаємо
mb  2ms2 2 .
2ms2 2 .
Приймаючи ( s )доп 2.5mb , отримаємо формулу для визначення допустимої величини вільного члена умовного рівняння базису
( |
) |
доп |
2.5 |
2 2m2 |
, |
(6.44) |
s |
|
|
s |
|
|
де тs – середня квадратична помилка довжини вихідної сторони тріангуляції в одиницях логарифма.
17.3. Умова дирекційних кутів
Для виведення формули допустимого вільного члену умовного рівняння дирекційних кутів (ωα)доп аналогічно

417
(6.19) запишемо у загальному вигляді функцію, за якою він обчислюється,
ωα = α1 ± А1 ± А2 ± … ± Ап – α2, |
(6.45) |
де α1 і α2 – вихідні дирекційні кути.
Далі, розмірковуючи аналогічно тому, як і при виведенні допустимих вільних членів умовних рівнянь полюса і базиса, можна отримати
( ) |
доп |
= 2.5 |
n 2 2m2 |
, |
(6.46) |
|
|
|
|
|
де тα – середня квадратична помилка вихідного дирекційного кута (азимута);
п – кількість кутів, що беруть участь в обчисленні вільного члена умовного рівняння дирекційних кутів.
18. Лінійні виміри в аналітичних мережах
Вимірювання – процес порівняння певної величини з іншою однорідною з нею величиною, яка прийнята за одиницю вимірювання.
В геодезії одиницею довжини є метр.
Існують два способи вимірювання довжин ліній на місцевості − безпосередній та опосередкований.
За своїм призначенням міри довжини поділяють на три основні групи:
еталони одиниці вимірювання довжин;
зразкові міри;
робочі міри довжини.
Еталони одиниці вимірювання довжин є основною мірою довжини в країні.
Еталони виготовляють для постійного збереження і відтворення прийнятої одиниці довжини.
У 1889 році був виготовлений і затверджений 31 еталон метра. Еталон № 6 прийнятий як міжнародний. Решта еталонів були розподілені по жеребкуванню між країнами, які підписали метричну конвенцію. Росія отримала два еталона метра − № 11 і № 28. Останній (№ 28) сьогодні є держа-
418
вним еталоном довжини в Росії і зберігається в НДІ метрології ім. Менделєєва в Санкт-Петербурзі.
Зразкові міри виготовляють дуже ретельно, порівнюють з еталоном, обережно зберігають і використовують тільки для порівняння з робочими вимірювальними приладами. Довжина зразкової міри порівнюється з еталоном при визначеній температурі, яка вказується в паспорті зразкової міри.
Робочі міри довжини і робочі вимірювальні прилади призначені для вимірювання довжин ліній на місцевості. Їх справжня довжина визначається із порівняння зі зразковими мірами.
Для вимірювання ліній на місцевості застосовують: мірні стрічки, рулетки, інварні дроти, оптичні віддалеміри, світловіддалеміри, радіовіддалеміри та ін.
До 1984 року всі прилади для вимірювання довжин ліній поділяли на три групи: геодезичні, топографічні і технічні. З 1 січня 1984 року був уведений новий ДЕСТ 19223
– 82 «Світловіддалеміри геодезичні. Загальні технічні умови». Були передбачені такі світловіддалеміри: Г – геодезичні, для вимірювання довжин у ДГМ; П – прикладної геодезії і маркшейдерії; Т – топографічні, призначені для вимірювання довжин у геодезичних мережах згущення і топографічних зйомках.
Таблиця 33 Технічні вимоги до світловіддалемірів
|
|
|
Межи вимірювання D, |
||
Група |
а, мм |
b, мм |
|
км |
|
|
|
|
нижня |
|
верхня |
Г |
5; 10 |
1; 2 |
0.5 |
|
15 – 50 |
П |
0.3;0.5; 1.2 |
0.5; 1; 2; 3 |
0.002 |
|
0.1 – 3 |
Т |
5; 10 |
2 ; 3 ; 5 |
0.002 |
|
1 – 15 |
419
Допустиме значення середньої квадратичної помилки
визначено формулою
тD = а + b · 10 - 6D,
де а і b − коефіцієнти (табл.33).
18.1. Основні методи вимірювання довжин ліній
Визначення віддалей з допомогою електромагнітних хвиль можливе тому, що ці хвилі розповсюджуються з конечною швидкістю. Якщо виміряти проміжок часу, за який електромагнітні хвилі пройшли шлях d, то можна визначити її довжину за відомою з фізики формулою
d = v · τ,
де τ – час проходження хвилями шляху d;
v – швидкість розповсюдження електромагнітних хвиль. Швидкість електромагнітних хвиль велика – біля 300 000 км/с. Тому проміжки часу проходження хвилями ліній, які зустрічаються в геодезичних роботах, дуже малі. Так лінію довжиною 12 км електромагнітні хвилі проходять за 4·10 – 5с = 40 мкс. Для визначення цього проміжку часу потрібно зафіксувати моменти проходження хвилями початку та кінця шляху, тобто віддалені між собою точки. Це важко зробити при такому малому проміжку часу та потрібній точності його визначення (приблизно 1·10 – 10с =
0.1 нс).
Набагато простіше визначити такий малий проміжок часу, коли його початок і кінець фіксується практично в одній точці. Це можливе, коли електромагнітні коливання проходять вимірювану лінію двічі: в прямому напрямку і зворотному. Тому на одному кінці ліній хвилі повинні відбиватися. Тоді довжина лінії S, яку ми вимірюємо, дорівнює половині шляху електромагнітних хвиль. Якщо хвилі проходять весь шлях за час τ, то довжина лінії буде
S d |
|
v |
. |
(6.47) |
|
||||
2 |
2 |
|
|
|
420
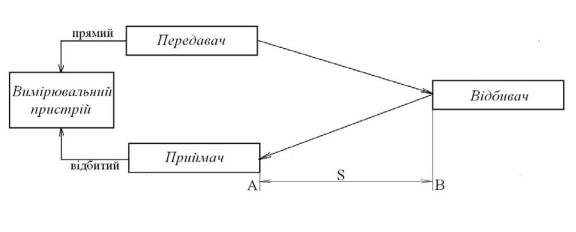
Тепер неважко уявити, з яких основних вузлів складаються електронні віддалеміри. Очевидно, що на одному кінці А вимірюваної лінії є передавач електромагнітних хвиль, їх приймач та вимірювальний пристрій, а на другому кінці В – відбивач. Ці вузли віддалеміра є основними.
Рис.173. Основні вузли електронного віддалеміра
Замість проміжку часу τ можна виміряти зміну відомої функції часу, яка відбулася за час дворазового проходження хвилями вимірюваної лінії. Це приводить до змін у конструкції та функціонуванні віддалеміра. У зв’язку з тим класифікацію методів вимірювання ліній за допомогою електромагнітних хвиль проводять за тією фізичною величиною, зміну якої визначає вимірювальний пристрій. Розрізняють три основні методи: часовий, фазовий і частотний.
Часовий метод найбільш наочний. При цьому методі передавач випромінює імпульси електромагнітних коливань. Тому його нерідко називають імпульсним. Невелику частину кожного імпульсу, випромінюваного передавачем у напрямі відбивача, подають на вимірювальний пристрій. Цю частину називають прямими, або опорними, імпульсами. Основна частина імпульсів двічі проходить вимірювану лінію: від передавача до відбивача і від відбивача до