

Geodeziya_1_chastina_26-09-2011
.pdf311
Таблиця 23 Відстані між пікетами і відділі від приладу до рейки
Масш- |
Переріз |
Максима- |
Максималь- |
Максималь- |
таб |
рельєфу, |
льна відс- |
на віддаль |
на віддаль |
зйомки |
м |
тань між |
від приладу |
від приладу |
|
|
пікетами, |
до рейки під |
до рейки під |
|
|
м |
час зйомки |
час зйомки |
|
|
|
рельєфу, м |
контурів, м |
1:5000 |
0.5 |
60 |
250 |
150 |
|
1.0 |
80 |
300 |
150 |
|
2.0 |
100 |
350 |
150 |
|
5.0 |
120 |
350 |
150 |
1:2 000 |
0.5 |
40 |
200 |
100 |
|
1.0 |
40 |
250 |
100 |
|
2.0 |
50 |
250 |
100 |
1:1 000 |
0.5 |
20 |
150 |
80 |
|
1.0 |
30 |
200 |
80 |
1 : 500 |
0.5 |
15 |
100 |
60 |
|
1.0 |
15 |
150 |
60 |
Примітка. При визначенні положення нечітких або другорядних контурів відстані збільшують у 1.5 разу.
Рис. 124. Абрис тахеометричної зйомки
Абрис зручно наносити на аркуші паперу із сіткою концентричних кіл (наприклад через 1 см) і радіусів, які утворюють кути в 10º (рис. 125). На підготовлену сітку на-

312
носять положення знімальної точки і всіх знімальних пікетів, указуючи їх номери.
Рис. 125. Абрис тахеометричної зйомки на спеціальному бланку
При використанні електронних тахеометрів відділі між пікетами та від приладу до рейки не повинні перевищувати величин, зазначених у таблиці 24.
При виконанні знімання з використанням електронних тахеометрів та польових комп’ютерів із необхідним програмним забезпеченням безпосередньо в полі створюють
313
електронний план місцевості («режим розумного зніман-
ня»).
|
|
|
|
Таблиця 24 |
Відстані між пікетами і віддалі від приладу до рейки |
||||
Масш- |
Переріз |
Максима- |
Максима- |
Максима- |
таб |
рельє- |
льна від- |
льна від- |
льна від- |
зйомки |
фу, м |
даль між |
даль від |
даль від |
|
|
пікетами, м |
приладу до приладу до |
|
|
|
|
рейки при |
рейки при |
|
|
|
зніманні |
зніманні |
|
|
|
рельєфу, м контурів, |
|
|
|
|
|
м |
1 : 5 000 |
0.5 |
60 |
1000 |
1000 |
|
1.0 |
80 |
1000 |
1000 |
|
2.0 |
100 |
1000 |
1000 |
|
5.0 |
120 |
1000 |
1000 |
1 : 2 000 |
0.5 |
40 |
750 |
750 |
|
1.0 |
40 |
750 |
750 |
|
2.0 |
50 |
750 |
750 |
1 : 1 000 |
0.5 |
20 |
600 |
600 |
|
1.0 |
30 |
600 |
600 |
1 : 500 |
0.5 |
15 |
500 |
500 |
|
1.0 |
15 |
500 |
500 |
Примітка. При використанні радіостанцій віддалі до контурів збільшуються у 1.5 разу.
5. Камеральні роботи
Виконання польових робіт при тахеометричному зніманні слід поєднувати з негайною повною камеральною обробкою матеріалів знімання. При цьому здійснюють:
перевірку польових журналів і складання детальної схеми знімальної основи;
обчислення координат і висот точок (з точністю до 0,01 м) тахеометричних (теодолітних) ходів;
314
обчислення висот усіх пікетів на станціях;
накладання точок знімальної основи, тахеометричних (теодолітних) ходів, пікетних точок; проведення го-
ризонталей і накладання ситуації.
Для автоматизації даних робіт пропонується використовувати різноманітні програмні комплекси, які дають змогу виконувати всі обчислення та формувати топографічні плани в цифровому і графічному вигляді.
Перевірка журналу необхідна в тому разі, коли роботи виконуються за допомогою теодолітів. Контролюють обчислення МО, вертикальних кутів тощо. Одночасно зазначають горизонтальні прокладення та перевищення.
Обчислення планових координат точок тахеометричних ходів виконують так само, як і точок теодолітного ходу. Дирекційні кути виписують у відомість із точністю до 0.1′, а приростки координат та відмітки висот – до 0.01 м. Допустимі кутові, лінійні та кутові нев’язки обчислюють за формулами, вказаними в попередньому параграфі.
По закінченні обчислень будують топографічний план місцевості. Послідовність побудови плану така:
побудова на аркуші паперу координатної сітки та її цифрування;
нанесення точок геодезичної основи та, при необхідності, інших знімальних точок, а потім контурних та орографічних пікетів;
нанесення ситуації на план;
побудова рельєфу місцевості;
остаточне оформлення плану.
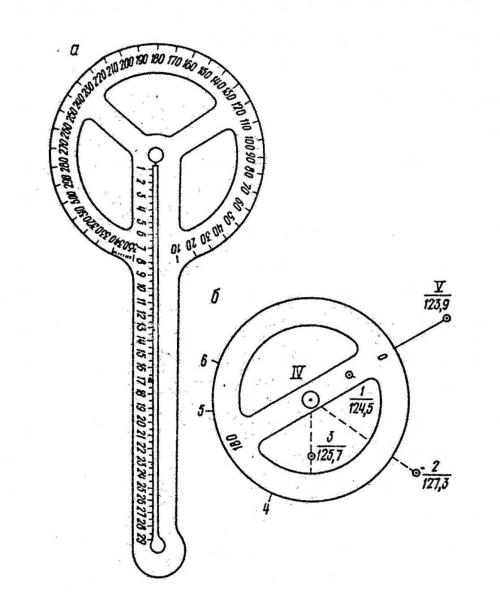
Виконання цих процесів ми розглядали в розділі «Теодолітна зйомка». Слід тільки зазначити, що при тахеометричній зйомці для нанесення на планшет пікетних точок і ситуації використовується круглий транспортир і масштабна лінійка або тахеограф. Тахеограф (рис. 126) являє собою круговий транспортир з лінійкою із прозорого матері-
315
алу, по колу якого нанесені поділки через 30′. Цифрування поділок виконано проти руху годинникової стрілки. Вдовж нульового радіуса розташована міліметрова шкала лінійки з початковим штрихом у центрі кола, в якому закріплена голка.
Рис. 126. Тахеограф
Для нанесення рейкової точки центр кола тахеографа суміщають із точкою станції на плані. Потім поворотом диска суміщають початковий напрямок на плані з відліком, що дорівнює полярному куту на знімальну точку. По лі-
316
нійці відкладають у масштабі плану відповідну полярну відстань і наколюють точку. Біля нанесених на план рейкових точок підписують їх номери і висоти. Згідно з абрисом і примітками в польових журналах креслять контури і предмети місцевості. За відмітками рейкових точок, користуючись методом графічної інтерполяції, проводять горизонталі. При цьому інтерполяцію виконують тільки за напрямками, відміченими на абрисі стрілками. Для поліпшення сприйняття рельєфу і зручності його читання на плані кожна п’ята горизонталь проводиться потовщеною.
План масштабу 1 : 500, як правило, викреслюють олівцем (у зв’язку з тим, що такий великомасштабний план доводиться доволі часто корегувати через зміни, які відбуваються на місцевості). Плани інших масштабів креслять тушшю відповідно до прийнятих умовних знаків.
Контрольні питання
1.У чому полягає сутність тахеометричної зйомки?
2.Яка спільність та відмінність тахеометричної зйомки від інших видів топографічних зйомок?
3.Які прилади застосовуються для проведення тахеометричної зйомки?
4.Поясніть порядок виконання тахеометричної зйомки.
5.Як виконується згущення геодезичної основи при тахеометричній зйомці?
6.Як вимірюються віддалі, кути і перевищення при тахеометричній зйомці?
317
Розділ 6. Геодезичні мережі
1. Види геодезичних мереж і методи їх побудови
Державна геодезична мережа поділяється на планову, яка створюється методами тріангуляції, полігонометрії і трилатерації, та висотну, яка створюється методами геометричного і тригонометричного нівелювання. ДГМ є головною геодезичною основою топографічних зйомок усіх масштабів і геодезичних вимірювань, які виконуються для забезпечення розвитку господарства і задоволення вимог оборони країни при розв’язанні відповідних наукових, ін- женерно-технічних та інших задач.
Планові геодезичні мережі створюють методами тріангуляції, полігонометрії, трилатерації, поєднанням цих методів, а також методами космічної (супутникової) геодезії.
Метод тріангуляції (від лат. triagulum – трикутник) є
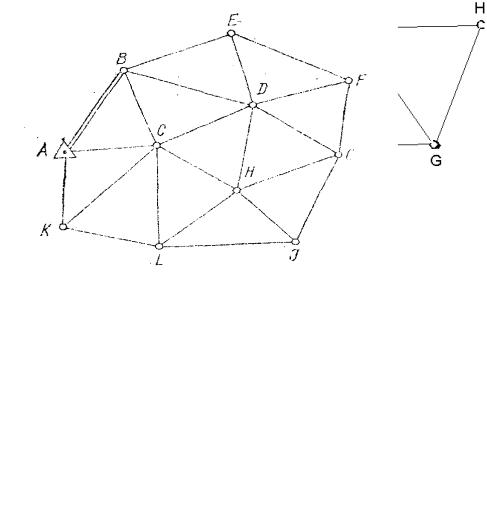
основним. Він полягає в побудові на місцевості рядів (рис.127) і мереж трикутників (рис. 128), послідовно зв’язаних між собою загальними сторонами. У вершинах трикутників розташовуються геодезичні пункти.
Якщо в одному з трикутників виміряти ту чи іншу сторону, наприклад АВ, яка має назву базисної сторони, а в кожному трикутнику величини двох або трьох кутів, то довжини сторін можуть бути обчислені шляхом послідовного розв’язання трикутників. За відомими координатами одного з пунктів, наприклад А, і дирекційному куту однієї зі сторін, наприклад АВ, можна, використовуючи виміряні кути, послідовно обчислити дирекційні кути всіх сторін трикутників, а за дирекційними кутами і довжинами сторін
– координати всіх пунктів тріангуляції.
Звичайно в кожному трикутнику вимірюють усі три кути, або кількість базисних сторін встановлюють у відповідності з вимогами спеціальних інструкцій.
318
Рис. 127. Ряд трикутників
Рис. 128. Мережа трикутників
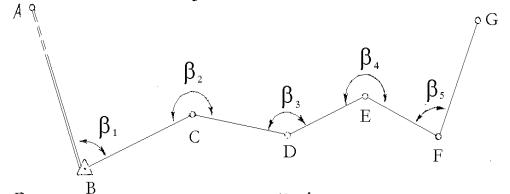
Метод полігонометрії (від грецк. polygones – багато-
кутний та metreo – вимірюю) полягає у вимірюванні на місцевості довжин послідовно зв’язаних між собою ліній, які створюють полігонометричний хід, а також у вимірюванні горизонтальних кутів між цими лініями (рис. 129). Якщо відомі координати вихідного пункта, наприклад В, і дирекційний кут однієї зв’язуючої з ним лінії ходу, наприклад ВА, то можна обчислити дирекційні кути всіх інших ліній ходу, а за дирекційними кутами і довжинами ліній знайти приростки координат і координати всіх пунктів ходу.
Метод полігонометрії доцільніше застосовувати в закритих і забудованих районах.
319
Рис. 129. Полігонометричний хід
Метод трилатерації (від лат. trilaterus – трьохсторон-
ній) відрізняється від методу тріангуляції тільки тим, що в трикутниках вимірюються не кути, а довжини всіх сторін. Для цієї цілі використовується, як правило, спеціальні геодезичні прилади – різного роду віддалеміри. За виміряними сторонами обчислюються кути трикутників. За відомим дирекційним кутом однієї зі сторін мережі обчислюють дирекційні кути решти сторін трикутників, а маючи координати вихідного пункту – координати решти пунктів мережі.
Методи космічної (супутникової) геодезії дозволяють визначити координати геодезичних пунктів за результатами спостережень за рухом штучних супутників Землі. При цьому відстані між шуканими пунктами можуть досягати кількох тисяч кілометрів, що дозволяє визначити взаємне положення материків, віддалених островів і т.п.
Одна з перших спроб точно визначити відносне розташування континентів була виконана з використанням явища покриття зір Місяцем. Цей метод у кращому випадку був громіздким та не відрізнявся особливою успішністю. Однак запуск першого радянського супутника у 1957 році суттєво поліпшив точність визначення зв’язку між різними геодезичними системами відліку у світі. На початку ери штучних супутників Землі (ШСЗ) був успішно застосований оптичний метод, який, по суті, базувався на методі зо-
320
ряної тріангуляції, розвинутому у Фінляндії ще в 1946 році. Всесвітня програма супутникової тріангуляції, яку часто називають ВС-4 за назвою застосованої фотокамери, дала можливість уперше визначити взаємне положення основних систем відліку. Метод полягав у фотографуванні супутників на фоні зірок за допомогою фотокамери, оснащеної спеціально припасованим шторковим затвором. На фотографії виникало зображення низки точок, які відображали траєкторію кожної окремої зірки або супутника. Координати вибраних точок як найточніше вимірювалися із застосуванням фотограмметричного компаратора, після чого з аналітичної фотографічної моделі визначалися просторові напрямки (одиничні вектори) від станції спостережень до ШСЗ. Виконуючи з сусідньої станції одночасне фотографування цього ж супутника та подібні обчислення, отримували нову послідовність напрямків. Кожна пара відповідних напрямків формує площину, до якої належать станції спостережень та супутник. Тому перетин кожної пари площин дає просторовий напрямок між станціями. Потім ці напрямки використовували для побудови глобальної геодезичної мережі, причому її масштаб визначався з кількох наземних базисів. Європейська база між Тромсьо в Норвегії та Катанією о. Сицилія є прикладом реалізації цієї ідеї. Головною проблемою використання оптичного методу була необхідність ясного неба одночасно на двох спостережних пунктах, віддалених один від одного на відстань приблизно 4000 км. Крім того, саме устаткування залишилося громіздким та дорогим. Тому оптичне вимірювання напрямків між пунктами незабаром було витиснуте радіотехнічним методом визначення відстаней завдяки можливості проведення спостережень за будь-яких погодних умов та меншій ціні на необхідне устаткування.